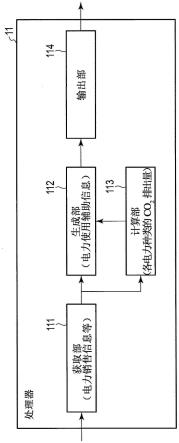
人机接口装置
1.本发明涉及一种人机接口装置。
2.已知的人机接口装置包括:
[0003]-固定的主体,
[0004]-器具,其可由使用者绕轴线在中立位置和倾斜位置之间旋转,中立位置是在没有外部应力作用于该器具的情况下器具的位置,和
[0005]-返回机械装置,其用于使器具返回至其中立位置,该返回机械装置包括永久地将器具驱至其中立位置的第一弹簧和第二弹簧。
[0006]
例如,这样的人机接口装置可以是如专利申请ep2509090中描述的指轮开关。在这种指轮开关的情况下,可由使用者的手移动的器具是指轮致动器。通过绕指轮致动器的旋转轴线缠绕的两个弹簧使指轮致动器返回到其中立位置。在这种类型的人机接口装置中,一旦两个弹簧中的一个断裂,指轮致动器就不再返回到它的中立位置,并且人机接口装置不再可用。
[0007]
现有技术也可从us2761026a、us2019/189373a1和jp2009117361a中获知。在这些人机接口装置中,当器具沿一个方向旋转时,摇杆绕另一轴线沿相反方向旋转。也可以从fr3051927和jps5899734u中获知现有技术。
[0008]
本发明旨在通过提供更稳健的人机接口装置来克服该缺点。因此,其主题是如权利要求1所述的人机接口装置。
[0009]
通过参考附图阅读以下描述将更好地理解本发明,以下描述仅以非限制性示例的方式给出,其中:
[0010]-图1是人机接口装置的局部透视图;
[0011]-图2是图1的人机接口装置的元件的子集的局部透视图;
[0012]-图3是图1的人机接口装置的各种元件的分解透视图;
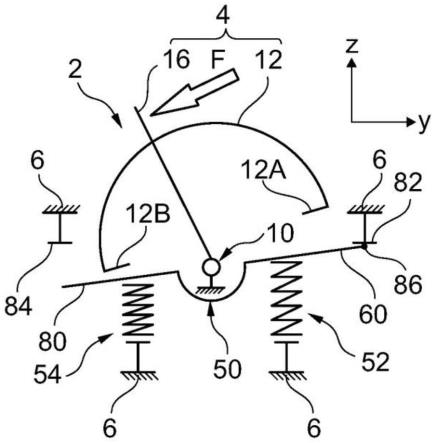
[0013]-图4和图5是图1的人机接口装置的功能图;
[0014]-图6和图7是另一人机接口装置的局部透视图;
[0015]-图8和图9是图6的人机接口装置的功能图。
[0016]
在这些图中,相同的附图标记用于表示相同的元件。在本说明书的剩余部分中,没有对本领域技术人员熟知的特征和功能进行详细描述。
[0017]
在本说明书中,首先,在第一部分中参照附图对实施例的详细示例进行描述。接着,在随后的部分(第二部分)中,介绍了这些实施例的变型。最后,在第三部分中介绍了各种实施例的优点。
[0018]
第一部分:实施例的示例:
[0019]
图1至图3示出了包括器具4的人机接口装置2,器具4的旋转在主体6内被引导。这里,器具4是指轮致动器。因此接口装置2是指轮开关。器具4被安装成仅围绕单个轴线10旋转。轴线10平行于正交坐标系xyz的x方向。轴线10相对于主体6系统地不动。
[0020]
在该坐标系xyz中,x方向和y方向是水平的,z方向是垂直的。在下文中,术语“顶”、“底”、“上”和“下”等是相对于垂直z方向定义的。术语“左侧”和“右侧”是相对于y方向和接
口装置2的垂直中间平面30定义的。因此,术语“右侧”或“右手侧”指的是当y方向指向右侧时,位于平面30右侧的一切。在下文中,使用坐标系xyz来确定附图的每一个附图的方向。
[0021]
可从主体6的外部接近器具4,从而可由使用者的手直接致动。为此,在该实施例中,器具4包括半圆形面12,半圆形面12的旋转轴线与轴线10重合。半圆形面12围绕轴线10从下滑动件12a延伸到另一下滑动件12b。这里,这些部分12a和12b被称为“滑动件”,因为如下所述,它们形成滑动连接件的一部分。第一平面和第二平面之间的角度大于45
°
或90
°
,并且通常小于270
°
或200
°
,其中第一平面包含轴线10和滑动件12a,第二平面包含轴线10和滑动件12b。此处,该角度等于180
°
。
[0022]
在实施例的该示例中,凹口14(图1)从面12向内突出。
[0023]
在该实施例中,器具4还包括从面12向外突出的操作杆16。在中立位置,该操作杆16基本上垂直地延伸。使用者的手指可以抓握操作杆16,以使器具4围绕轴线10沿前向方向s
av
旋转以及替选地沿反向方向s
ar
旋转。正向方向s
av
和反向方向s
ar
分别由图1中的符号s
av
和s
ar
标识的箭头表示。这里,方向s
av
是逆时针方向,并且方向s
ar
是顺时针方向。
[0024]
器具4围绕轴线10并沿方向s
av
从图1所示的中立位置枢转到图2所示的第一倾斜位置。器具4还能够围绕轴线10并沿方向s
ar
从中立位置枢转到第二倾斜位置。通常,器具4的该第二倾斜位置相对于垂直平面30(图1)与第一倾斜位置对称。平面30包含轴线10并且平行于x方向和z方向延伸。当器具处于它的中立位置时,平面30也穿过操作杆16。
[0025]
中立位置是器具4在没有外部应力的情况下占据的位置。中立位置和第一倾斜位置之间的角度偏移α
av
在此被包括在15
°
至90
°
之间或在20
°
至45
°
之间。
[0026]
为了限制器具4和轴线10之间的摩擦,器具4通过两个滚珠轴承20、22(图2和图3)安装在轴线10上。为此,器具4包括沿轴线10延伸的轴24。轴24的每一端无自由度地紧固到滚珠轴承20和22的内周缘。
[0027]
轴24通过隔板26机械连接到面12。隔板26在平行于y方向和z方向的垂直平面28(图1)中延伸。这里,隔板26是中心位于轴线10上的半圆盘。
[0028]
平面28是接口装置2的对称性平面。在中立位置,接口装置2也相对于平面30对称。因此在下文中,只对位于平面28后面并且位于平面30的右侧的接口装置2的元件进行详细的描述。其他元件可以通过对称性来推导。
[0029]
轴承20、22的外周缘分别无自由度地紧固到设置在刚性半壳32和34中的相应孔的内部(图3)。
[0030]
此处,半壳32和半壳34沿与平面28重合的耦合平面互锁。当这些半壳32、34已互锁时,它们形成主体6。
[0031]
半壳32被成形为引导和限制器具4移动的角度幅度。例如,半壳32包括圆形凹槽36(图2),当器具4在第一倾斜位置和第二倾斜位置之间移动时,面12的垂直边缘在圆形凹槽36内滑动。该凹槽36的端部形成止动件,该止动件阻止器具4移动超过第一倾斜位置和第二倾斜位置。因此,凹槽36限定了器具4移动的角度幅度。
[0032]
半壳32包括背离平面28的垂直外表面。该外表面包括能够容纳电路板40(图3)的外壳体38(图3)。电路板40通常包括测量器具4绕轴线10的角度位置的传感器。
[0033]
接口装置2还包括覆盖和保护电路板40的盖子42(图3)。
[0034]
类似地,电路板44(图3)容纳在半壳34的外壳体中。电路板44被盖子46(图3)覆盖。
例如电路板44与电路板40相同,以确保器具4在角度位置测量的冗余。
[0035]
电路板40和电路板44电连接到连接器48(图1),经由连接器48传送由这些电路板测量的器具4的角度位置。
[0036]
接口装置2包括将器具4永久地驱至它的中立位置的返回机械装置。该机械装置包括两个返回弹簧52和54(图1和图3)以及悬挂在这两个返回弹簧52和54上的摇杆50。例如,弹簧52和弹簧54是螺旋弹簧,该螺旋弹簧的匝圈绕在相应的中心轴线缠绕。在图2中,为了该图的易读性,未示出弹簧52和54。
[0037]
摇杆50可在以下位置之间移动:
[0038]-静止位置,如图1所示;
[0039]-第一斜向位置,如图2所示;和
[0040]-第二斜向位置。
[0041]
第二斜向位置相对于平面30与第一斜向位置对称。
[0042]
在静止位置,摇杆50将器具4保持其中立位置。在第一斜向位置(图2),摇杆50永久性地沿方向s
ar
推动器具4,以使其从其第一斜向位置返回到其中立位置。在第二斜向位置,摇杆50永久性地沿方向s
av
推将器具4,以使其从其第二斜向位置返回到其中立位置。
[0043]
摇杆50的右手侧部分包括侧翼60。侧翼60包括在静止位置在穿过轴线10的水平面中延伸并沿y方向延伸到支点62的区段。在与支点62相对的一侧,侧翼60包括环绕轴24的圆弧区段。
[0044]
侧翼60包括上平面部64和下表面66,它们都在静止位置在水平面中延伸。下表面66包括用于容纳弹簧52的上端的容纳区域68。这里,区域68包括能够装配在弹簧52的线圈内的圆柱销70。弹簧52的下端位于形成在半壳32的下部部分中的平面部上。弹簧52和弹簧54中的每一个的尺寸被限定为单独地使摇杆50从第一斜向位置和第二斜向位置中的任一个返回至其静止位置。
[0045]
在图1至图3中,在静止位置与侧翼60对称的侧翼已由附图标记80表示。
[0046]
在静止位置,侧翼60的支点62被弹簧52推靠在半壳32的基台82上。基台82是形成在半壳32的内表面中的突起,即形成在半壳32的面向平面28的表面中的突起。基台82沿x方向水平延伸,使得其端部位于支点62的上方。基台82沿x方向的长度也足够短,使得当器具4向第二倾斜位置移动时,不妨碍器具4的移动。因此,当器具4向第二倾斜位置移动时,基台82足够短以允许隔板26通过。同样地,基台82也布置成不妨碍面12的移动。为此,在此基台82位于容纳滚珠轴承22的孔和凹槽36之间。
[0047]
半壳32还包括基台84(图3),该基台84相对于平面30与基台82对称。
[0048]
支点62和基台82也被设计成当器具4移动到其第一倾斜位置时,通过支点62和基台82的形状的相互作用形成铰接件85(图2)。铰接件85允许摇杆50围绕轴线86(图2)从其静止位置枢转到其第一斜向位置。轴线86与轴线10分开并平行于轴线10。
[0049]
为此目的,在活动位置支点62与基台82保持接触,同时摇杆50在其静止位置和其第一斜向位置之间移动。然后,支点62位于轴线86上。相反地,当摇杆50从静止位置移动到其第二斜向位置时,该支点62移动到不再与基台82接触的远离位置。
[0050]
在静止位置,容纳区域68在包含轴线10和86的水平面中的正交投影完全位于这两个轴线之间。因此,弹簧52的回复力对摇杆50的作用点位于轴线10和轴线86之间。该作用点
对应于以下点:在该点处,与弹簧52对摇杆50的施加的力具有相同方向和相同幅度的离散力产生的效果与由弹簧52施加的回复力产生的效果完全相同。在该实施例中,该作用点位于弹簧52的中心轴线和侧翼60的下表面66的交点处。回复力的该作用点与轴线86之间的最短距离大于1mm、2mm或3mm。通常该最短距离也小于3cm或1cm。
[0051]
为了使摇杆50在其静止位置和其第一斜向位置与第二斜向位置之间移动,接口装置2包括将器具4机械联接到摇杆50的滑动连接件90。该滑动连接件允许器具4驱动摇杆50抵抗弹簧52和54的回复力而移动。它还允许摇杆50驱动器具4移动。
[0052]
这里,滑动连接件由在中立位置相对于平面30对称的第一部分和第二部分形成。第一部分位于平面30的右侧。该第一部分包括侧翼60的朝上平面部64和半圆面12的滑动件12a。更准确地说,侧翼60的支点62位于凹槽36之外。因此,当器具4从其中立位置枢转到其第二倾斜位置时,滑动件12a移动以压靠在平面部64上并沿平行于平面28的方向在该平面部64上滑动。相反地,当器具4在枢轴上从其中立位置旋转到其第一位置时,滑动件12a移动远离平面部64,如图2所示。因此,滑动连接件的第一部分可通过器具4在接合位置和分离位置之间移动,其中在该接合位置,滑动件12a在平面部64上滑动,在该分离位置,滑动件12a远离平面部64并且与平面部64机械隔离。
[0053]
在静止位置,半圆面12的滑动件12a和12b同时分别压靠在侧翼60和侧翼80的平面部上。因此,一旦使用者将器具4从其中立位置沿方向s
ar
或沿方向s
av
移动,这立即驱动摇杆50沿相同方向旋转。在静止位置之外,滑动件12a、12b中只有一个压靠在摇杆50的侧翼的平面部上。
[0054]
现在将参照图4和图5的功能表示来描述接口装置2的操作。图4和图5分别示出了当器具4处于其中立位置和其第一倾斜位置时的接口装置2。在这些功能表示中,参考前面附图描述的接口装置2的各种元件已经由线条图表示并且已经由相同的附图标记表示。
[0055]
在没有外部应力的情况下,弹簧52和弹簧54使侧翼60和侧翼80的支点同时分别压靠在主体6的基台82和基台84上。因此摇杆50保持在其静止位置。当摇杆50处于其静止位置时,器具4的滑动件12a和滑动件12b同时压靠在侧翼60和侧翼80的平面部上。器具4因此保持在其中立位置。
[0056]
当使用者沿方向s
av
向器具4施加力f(图5)时,器具4通过围绕轴线10旋转而移动到其第一倾斜位置。然后滑动件12b压靠在侧翼80的平面部上并在该平面部上滑动。然后滑动连接件的第二部分处于其接合位置。因此,通过滑动连接件的该第二部分,器具4将侧翼80向下推。弹簧54压缩并且侧翼80的支点不再压靠在基台84上。滑动件12a移动远离侧翼60的平面部64并且不再与侧翼60接触。
[0057]
并行地,弹簧52使侧翼60的支点62压靠在基台82上。因此,摇杆50围绕轴线86旋转,轴线86穿过以下点:在该点处,侧翼60的支点62压靠在基台82上。由于容纳区域68位于包含轴线10和轴线86的垂直平面之间,因此摇杆50围绕轴线86的这种旋转移动也压缩弹簧52。因此,摇杆50抵抗弹簧52和弹簧54的回复力而移动到其第一斜向位置。
[0058]
当使用者松开器具4并且不再对该器具施加任何力时,弹簧52和弹簧54自动将摇杆50返回到其静止位置。当摇杆50返回到其静止位置时,侧翼80的平面部将滑动件12b向上推,这使器具4返回到其中立位置。
[0059]
当弹簧54损坏时,它不再对摇杆50施加任何回复力。相反,未损坏的弹簧52仍能够
单独地使摇杆50从第一斜向位置和第二斜向位置返回到其静止位置。因此,即使弹簧54损坏,接口装置2仍然可以使用。
[0060]
此外,当弹簧54损坏时,将摇杆50驱至其静止位置的回复力比当两个弹簧52和54都完好时弱。因此,当弹簧54损坏时,使用者必须施加的使器具4在第一倾斜位置和第二倾斜位置之间移动的力较小。然后使用者感觉到回复力的这种差异并且可以在弹簧52依次损坏之前触发适当的维护操作。
[0061]
在弹簧52损坏的情况下接口装置2的操作与在弹簧54损坏的情况下的上述操作相同。
[0062]
图6和图7示出了与人机接口装置2相同的人机接口装置100,除了:
[0063]-用器具104取代器具4,
[0064]-用主体106取代主体6,和
[0065]-用摇杆150取代摇杆50。
[0066]
在该实施例中,器具104、主体106和摇杆150被配置成使得弹簧52和弹簧54在拉伸状态下工作而不是在压缩状态下工作。为了简化图6和图7,仅示出了弹簧52。图6示出了器具104位于其中立位置且摇杆150位于其静止位置。图7示出了器具104位于其第二倾斜位置且摇杆150处于其第二斜向位置。
[0067]
如在图1至图3的实施例中,接口装置100相对于平面28对称,并且在中立位置也相对于平面30对称。因此,在下文中,仅对位于平面30的右侧部分中的元件进行了详细描述。
[0068]
例如器具104与器具4相同,除了隔板26包括窗口120。窗口120的下部部分形成在中立位置水平的平面部122。摇杆150的滑动件124在中立位置压靠在该平面部122上。平面部122和滑动件124相对于平面30的对称等效物已分别由附图标记132和134表示。
[0069]
主体106与主体6相同,除了基台82和基台84已分别被基台136和基台138代替(图6)。这些基台136、138位于摇杆150的相应支点下方。
[0070]
摇杆150与摇杆50相同,除了支点62已被支点142代替,支点142在静止位置被弹簧52的回复力压靠在基台136上。基台136位于支点142下方。与上文描述的类似,当摇杆150从其静止位置移动到第二斜向位置时,支点142与基台136相互作用以形成允许摇杆150围绕平行于轴线10的旋转轴线144旋转的铰接件。用于容纳弹簧52的上端的区域在包含轴线10和轴线144的平面中的正交投影完全位于这两个轴线之间。因此,弹簧52的回复力的作用点位于这两个轴线之间并且距轴线144的距离大于1mm或2mm或3mm。在此,容纳区域包括孔110,弹簧52的一匝圈的端部容纳在孔110内。
[0071]
现在将参考图8和图9描述接口装置100的操作。图8和图9是接口装置100的功能表示。它们分别示出了当器具106处于其中立位置和其第一倾斜位置时的接口装置100。
[0072]
在没有外部应力的情况下,弹簧52和弹簧54将摇杆150的相对的支点分别推靠在基台136和基台138上。然后平面部122、平面部132同时压靠在滑动件124和滑动件134上。器具104因此保持在其中立位置。
[0073]
当使用者施加将器具104从其中立位置移动到其第一倾斜位置的力f(图9)时,平面部122将滑动件124向上拉。同时,摇杆150的左手侧支点保持压靠在基台138上。因此,摇杆150抵抗弹簧52和弹簧54的回复力围绕穿过该左手侧支点的水平轴线枢转以抵靠基台138。
[0074]
当使用者松开器具104时,弹簧52和弹簧54自动使摇杆150返回至其静止位置。当摇杆150返回至其静止位置时,滑动件124压靠在平面部122上,这同时使器具104返回至其中立位置。
[0075]
如接口装置2的情况,如果弹簧54损坏,由于弹簧52的回复力的作用点位于轴线10和轴线144之间,因此弹簧52能够单独地使摇杆150从第一斜向位置和第二斜向位置返回至其静止位置。
[0076]
第二部分:器具的变型:
[0077]
器具的变型
[0078]
器具4可以采用许多不同的形式。例如,在第一变型中,省略了操作杆16。在另一个变型中,仅保留了操作杆16并且省略了半圆面12。在后一种情况下,器具4是操作杆,不再是指轮开关。然而,即使在简单的操作杆的情况下,该操作杆也通过滑动连接件机械地连接到摇杆,正如在接口装置2或接口装置100的情况下所描述的。
[0079]
器具4还可以包括一个或更多个按钮,每个按钮均可在凸出位置(proud position)和使用者的手指抓握器具4时手指按压的位置之间移动。
[0080]
在简化的变型中,器具只能在中立位置和第一倾斜位置之间移动。在这种情况下,可以任意选择沿摇杆的左手侧部分容纳弹簧54的区域的位置。例如,在摇杆50的情况下,该容纳区域可以更靠左地位于侧翼80的下表面的超出基台84的区段上。
[0081]
关于器具4仅能够围绕单个轴线在枢轴上旋转的特定情况的教导也可以应用于能够围绕多个彼此不平行且全部穿过同一点(称为“旋转中心”)的旋转轴线在枢轴上旋转的器具。该旋转中心相对于接口装置的主体无自由度地固定。因此,这些教导也应用于以下情况:器具能够围绕轴线10并且围绕平行于y方向并与轴线10相交的附加水平轴线在枢轴上旋转。在这种情况下,关于在器具4围绕轴线10在枢轴上旋转之后使器具4返回至其中立位置的所有教导也可应用于在器具4围绕附加轴线在枢轴上旋转之后使器具4返回至其中立位置。特别地,返回机械装置然后包括一对附加的返回弹簧,并且摇杆另外包括两个附加的侧翼。这些附加的侧翼中的每个侧翼平行于y方向延伸并且位于附加轴线的任一侧。附加弹簧和附加侧翼如在上述侧翼和弹簧的情况中所描述的布置。
[0082]
作为变型,器具可以围绕穿过旋转中心的所有旋转轴线在枢轴上旋转。在后一种情况下,器具4和主体之间的机械连接件通常是球形接头连接件。为了确保器具返回至其中立位置,返回机械装置然后包括至少两对弹簧,所述至少两对弹簧如前段所述进行布置。
[0083]
当器具能够围绕至少三个不共线的旋转轴线在枢轴上旋转时,返回机械装置还可以包括多于两对返回弹簧。在每种情况下,每对弹簧都如第一部分中描述的进行布置,以确保即使一对弹簧中的一个损坏,器具也能返回至其中立位置。
[0084]
器具也可以设计成通过除使用者的手以外的方式来移动。例如,作为一种变型,器具被设计成通过使用者的脚移动。器具还可以通过机器人等在其中立位置和倾斜位置之间移动。
[0085]
其他变型:
[0086]
滑动连接件的其他实施例是可能的。例如,在一个特定实施例中,滑动件的位置和平面部的位置是倒置的。然后将滑动件和平面部中的一个紧固到摇杆,并且将滑动件和平面部中的另一个紧固到器具。
[0087]
第三部分:所述实施例的优点:
[0088]
当弹簧52、弹簧54中的一个损坏时,它不再对摇杆施加任何回复力。然而在此处描述的实施例中,这不会阻止器具在没有对摇杆的外部应力的情况下返回至其中立位置。因此,即使弹簧52、弹簧54中的一个损坏,人机接口装置仍然可用。
[0089]
此外,当弹簧52、弹簧54中的一个损坏时,使用者必须施加的将器具从其中立位置移动到其倾斜位置之一的力较小。使用者感知到这种触觉反馈。因此,他被告知弹簧52、弹簧54中的一个损坏。这使得可以在其他弹簧损坏之前触发必要的维护操作,并且从而在接口装置完全无法使用之前触发必要的维护操作。
[0090]
通过在返回机械装置中使用摇杆,无论器具倾斜的方向如何,器具都围绕相同的轴线或相同的旋转中心旋转。这有助于测量器具的角度位置。此外,由于返回弹簧不直接固定至器具,因此可以在不卸载弹簧的情况下卸载器具。
[0091]
将用于容纳弹簧的两个区域放置在轴线10和摇杆的旋转轴线之间使得能够保持使器具分别从第一倾斜位置和第二倾斜位置中的任一个返回至其中立位置的能力。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。