1.本发明涉及系留无人机技术领域,特别地是一种系留无人机车载降落控制方法。
背景技术:
2.系留无人机车载降落控制方法在现有技术中分两种方案,一种是通过机械的对位装置对位,这种设计会增加飞机重量,减小有效载荷;第二种不依赖于机械对位,靠导航降落的实例,只适用于飞机尺寸较小的情况,翼展1米以下,比如便携式系留,降落时地效作用不太明显,降落平台相对于飞机要大得多,比较容易降落。
3.大尺寸的系留无人机,翼展一米以上,降落平台尺寸相对较小,与翼展相当。飞机的尺寸越大,地效作用就越明显,落地精度就越差。飞行高度200米,20kg载荷的四轴八桨系留无人机,螺旋桨直径86cm,翼展1.98米,总重60kg,起落架尺寸约60cm,正常地面降落精度在50cm左右。车载平台尺寸有限,降落平台设计一般不超过车体尺寸,比如2mx2m,宽度已略大于皮卡宽度。在无风的情况下基本可以正常降落到平台上,但是阵风会严重影响降落位置,可能将飞机吹离降落平台,造成事故。
技术实现要素:
4.本发明的目的在于一种系留无人机车载降落控制方法,使得大尺寸多旋翼飞机能够在相对较小的平台上降落,实时计算降落精度,不符合落地条件时进行复飞,避免事故发生。
5.本发明通过以下技术方案实现的:
6.一种系留无人机车载降落控制方法,包括以下步骤:
7.步骤s1、系留无人机接到降落指令后,先垂直爬升或下降到返航点,再水平返航到悬停点;
8.步骤s2、在悬停点改变航向,使系留无人机机头方向与车载平台方向对正,接着下降到等待降落点;
9.步骤s3、在等待降落点调整位置使系留无人机与平台对正,当对正误差连续几秒都在对正精度范围内时,控制系留无人机快速下降;
10.步骤s4、在系留无人机快速下降的过程中,不停计算对正误差,若误差大于降落误差时,系留无人机上升至等待降落点,重复对正至降落过程;
11.步骤s5、当系留无人机快速下降到小于停桨高度时,系留无人机停桨,自由落体至车载平台。
12.进一步地,所述步骤s5中,当系留无人机距离地面距离<停桨高度时,则关闭系留无人机螺旋桨,使系留无人机自由下落至车载平台。
13.进一步地,所述系留无人机和所述车载平台上均安装有双天线rtk。
14.进一步地,所述系留无人机的起落架底部采用碳管连接。
15.进一步地,所述车载平台的降落平台四角均安装有减震器。
16.进一步地,所述车载平台上铺设有胶垫。
17.本发明的有益效果:
18.本发明实现了大尺寸多旋翼飞机能够在相对较小的平台上降落,降落平台简单,没有复杂的对位装置;系留无人机在等待降落点调整位置使系留无人机与平台对正,只有当对正误差连续一段时间都小于允许对正精度时,才控制系留无人机快速下降,可以充分确保系留无人机稳定,减小下降时的偏移量。系留无人机通过快速下降,减小了阵风对系留无人机偏移的影响;留无人机快速下降的过程中不断计算位置偏差,大于允许降落精度时时重新上升高度,重新对正,防止落点偏差过多造成事故。留无人机低于停桨高度时停桨,一方面可以减小落点偏差,另一方面防止系留无人机侧滑、弹跳、或翻到平台上等异常情况下因螺旋桨高速旋转造成的事故。
附图说明
19.图1为本发明实施例一种系留无人机车载降落控制方法的降落过程控制流程图;
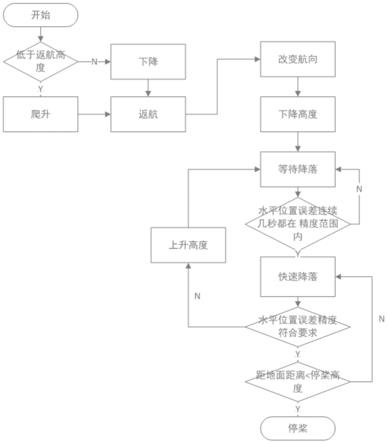
20.图2本发明实施例的系留无人机降落位置及过程示意图。
具体实施方式
21.下面将结合附图以及具体实施例来详细说明本发明,在此以本发明的示意下面将结合附图以及具体实施例来详细说明本发明,在此以本发明的示意性实施例及说明用来解释本发明,但并不作为对本发明的限定。
22.需要说明,在本发明中如涉及“第一”、“第二”的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
23.在本发明中,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
24.参照图1,一种系留无人机车载降落控制方法,包括以下步骤:
25.步骤s1、系留无人机接到降落指令后,先垂直爬升或下降到返航点,再水平返航到悬停点;
26.步骤s2、在悬停点改变航向,使系留无人机机头方向与车载平台方向对正,接着下降到等待降落点;
27.步骤s3、在等待降落点调整位置使系留无人机与平台对正,当对正误差连续几秒(最短对正时间)都在对正精度范围内时,控制系留无人机快速下降;需要说明的是,最短对正时间:当飞机的对正误差小于等于对正精度时开始计时,计时过程中如果对正误差大于对正精度重新开始计时,当计时时间大于等于该时间时快速下降。
28.步骤s4、在系留无人机快速下降的过程中,不停计算对正误差,若误差大于降落误差时,系留无人机上升至等待降落点,重复对正至降落过程;
29.步骤s5、当系留无人机快速下降到小于停桨高度时,系留无人机停桨,自由落体至车载平台。系留无人机停桨的过程中,增大系留线缆拉力,防止系留无人机侧滑或弹跳。
30.具体的,本实施例方案中,所述步骤s5中,当系留无人机距离地面距离<停桨高度时,即当系留无人机距离地面距离<20cm时,则关闭系留无人机螺旋桨,使系留无人机自由下落至车载平台。
31.具体的,本实施例方案中,所述系留无人机和所述车载平台上均安装有双天线rtk。可以获得系留无人机rtk天线的方位角和车载平台的rtk天线方位角。系留无人机端配置为动基站差分rtk,基站信息由车载平台rtk提供,可以实时获得系留无人机与车载平台的相对位置;需要说明的是,rtk异常时的处理:控制过程中,当rtk异常时,系留无人机无法精确计算落点误差,需要暂时飞到悬停点,等待rtk正常后,继续重复下降高度、等待降落、快速降落的过程。
32.具体的,本实施例方案中,所述系留无人机的起落架底部采用碳管连接。保证降落时即使有一边超出降落平台边缘时,另外三边仍然可以将系留无人机支撑在平台上,不至于翻滚到平台下面,可以最大程度利用平台支撑面积。
33.具体的,本实施例方案中,所述车载平台的降落平台四角均安装有减震器,当飞机快速降落到平台上时起缓冲作用。
34.具体的,本实施例方案中,所述车载平台上铺设有胶垫,起缓冲作用的同时,增大起落架与平台间的摩擦,防止系留无人机降落时侧滑。中间圆孔用于系留线缆通过。正对圆孔下方有四个滚轴,用于减小线缆与平台的摩擦力。平台中间的四个挂钩用于运输时临时固定系留无人机。
35.参照图2,具体的,本发明的降落控制过程中,降落位置及误差说明:
36.起始点:系留无人机接收到降落指令时的当前位置。
37.返航点:系留无人机当前位置的正上方或正下方,高度等于悬停高度。
38.悬停点:车载平台中心正上方,高度等于悬停高度。
39.等待降落点:车载平台中心正上方,高度等于等待降落高度。
40.悬停高度:悬停点与车载平台的垂直高度。不能太小,太小系留无人机移动有可能撞到平台、卡车及周围的树木和建筑物;也不能太大,从悬停点降落到等待降落点时,如果下降速度过大会导致水平及垂直位置偏移会过大,如果下降速度过小会导致降落时间过长,野外环境一般选择7-10米。
41.等待降落高度:等待降落点与车载平台的垂直高度。一般略高于地面效应开始影响系留无人机控制精度的高度,对于直径86cm螺旋桨的系留无人机,选择0.7-1米左右。
42.停桨高度:当系留无人机与平台高度小于此高度时,可以关闭螺旋桨,使系留无人机自由下落。
43.对正精度:等待降落过程中当前位置与理想落点之间允许的水平误差范围,略大于控制精度。
44.降落精度:降落过程中当前位置与理想落点允许的水平误差范围。
45.本发明实现了大尺寸系留无人机(多旋翼飞机)能够在相对较小的平台上降落,降
落平台简单,没有复杂的对位装置;系留无人机在等待降落点调整位置使系留无人机与平台对正,只有当对正误差连续一段时间都小于允许对正精度时,才控制系留无人机快速下降,可以充分确保系留无人机稳定,减小下降时的偏移量。系留无人机通过快速下降,减小了阵风对系留无人机偏移的影响;留无人机快速下降的过程中不断计算位置偏差,大于允许降落精度时时重新上升高度,重新对正,防止落点偏差过多造成事故。留无人机低于停桨高度时停桨,一方面可以减小落点偏差,另一方面防止系留无人机侧滑、弹跳、或翻到平台上等异常情况下因螺旋桨高速旋转造成的事故。
46.以上对本发明实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本发明实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本发明实施例的原理;同时,对于本领域的一般技术人员,依据本发明实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。