1.本发明的实施方式涉及一种电动吸尘器。
背景技术:
2.已知一种电动吸尘器,具备在吸入口体离开被清扫面时使旋转刷的旋转自动地停止的开关。在吸入口体与被清扫面接触的情况下,开关开启,在吸入口体离开被清扫面的情况下,开关闭合。
3.在吸入口体与被清扫面接触的情况下,向电动机供给的电力被控制成为第二电力。当在该控制的执行中吸入口体离开被清扫面时,开关闭合而切断向电动机的电力供给。此时,在电动机中流动的电流低于基准电流。当在电动机中流动的电流低于基准电流时,向电动机供给的电力被控制成为小于第二电力的第一电力。当在该控制的执行中吸入口体与被清扫面接触而开关开启时,向电动机供给被控制成为第一电力的电力。当在电动机中流动的电流达到第一电流而超过基准电流时,向电动机供给的电力被控制成为大于第一电力的第二电力。
4.即,以往的电动吸尘器为,在与吸入口体的接触相伴随的旋转刷的再次启动时,使向电动机供给的电力从第二电力向第一电力减少,由此抑制电动机产生的浪涌电流。
5.专利文献1:日本特开2019-92831号公报
6.作为使旋转清扫体接触的被接触面的代表例,抑制地板、以及包括小地毯、浴垫等在内的地毯。地板比地毯平滑,小地毯、浴垫的绒毛较长且具有凹凸。因此,地板和旋转清扫体之间的旋转阻力比较小,与地板和旋转清扫体之间的旋转阻力相比,地毯和旋转清扫体之间的旋转阻力极大。由此,从旋转清扫体的旋转阻力的大小的观点出发,电动机必须使旋转清扫体在具有不同性质且多个种类的被接触面上旋转驱动。
7.然而,在如以往的电动吸尘器那样,使电动机的启动时的电力暂时减少的情况下,根据被接触面的种类不同,旋转清扫体的旋转阻力有可能过大,而电动机在低速旋转下将尘埃挠出的能力不足、或者无法启动。
技术实现要素:
8.因此,本发明的目的在于提供一种电动吸尘器,能够与被接触面和旋转清扫体之间的旋转阻力无关,使产生旋转清扫体的旋转驱动的电动机可靠地启动。
9.为了解决上述课题,本发明的实施方式的电动吸尘器具备:旋转清扫体,被支承为能够旋转;电动机,产生上述旋转清扫体的旋转驱动力;检测部,检测能够辨别上述旋转清扫体相对于上述旋转清扫体接触的被接触面的旋转阻力的大小的物理量;以及控制部,在将上述旋转阻力较小的第一被接触面上的上述电动机的输入设为第一输入,将上述旋转阻力大于上述第一被接触面的第二被接触面上的上述电动机的输入设为第二输入时,将上述第二输入控制得大于上述第一输入,在使与上述被接触面接触的上述旋转清扫体启动的情况下,上述控制部使上述电动机暂时以大于上述第一输入的第三输入启动。
10.发明的效果:根据本发明的电动吸尘器,能够与被接触面和旋转清扫体之间的旋转阻力无关地使产生旋转清扫体的旋转驱动的电动机可靠地启动。
附图说明
11.图1是本发明的实施方式的电动吸尘器的立体图。
12.图2是本发明的实施方式的电动吸尘器的吸入口体的控制框图。
13.图3是表示本发明的实施方式的电动吸尘器执行的电动机的输入控制的一个例子的流程图。
14.图4是表示本发明的实施方式的电动吸尘器执行的电动机的再次启动控制的一个例子的流程图。
15.图5是将本发明的实施方式的电动机的再次启动控制与比较例的再次启动控制进行比较的示意图。
16.图6是将本发明的实施方式的电动机的再次启动控制与比较例的再次启动控制进行比较的示意图。
17.图7是将本发明的实施方式的电动机的再次启动控制与比较例的再次启动控制进行比较的示意图。
18.图8是将本发明的实施方式的电动机的再次启动控制与比较例的再次启动控制进行比较的示意图。
19.符号的说明
[0020]1…
电动吸尘器,2
…
吸尘器主体,3
…
延长管,5
…
吸入口体,11
…
把手部,12
…
主体外壳,12a
…
前部,12b
…
中央部,12c
…
后部,13
…
电动鼓风机,15
…
分离集尘部,16
…
吸入管,17
…
主体控制部,18
…
二次电池,19
…
吸入口,21
…
控制电路板,22
…
输入部,22a
…
运转开始开关,22b
…
运转停止开关,25
…
排气口,28
…
旋转清扫体,29
…
电动机,41
…
吸入口体控制部,45
…
电线,46
…
接地侧电线,47
…
非接地侧电线,51
…
控制用电源生成电路,52
…
基准电压产生电路,53
…
驱动电路,55
…
电流检测电路,56
…
电流限制电路,57
…
开闭器,58
…
安全装置,61
…
接触检测部。
具体实施方式
[0021]
参照图1至图8对本发明的电动吸尘器的实施方式进行说明。
[0022]
图1是本发明的实施方式的电动吸尘器的立体图。
[0023]
如图1所示那样,本实施方式的电动吸尘器1例如为棒型,也是手持型。电动吸尘器1具备能够手持操作的吸尘器主体2、能够相对于吸尘器主体2拆装的延长管3、以及能够相对于延长管3拆装的吸入口体5。
[0024]
此外,在使用者手持电动吸尘器1并且使吸入口体5与作为被接触面的地面接触的状态下,图1相当于从使用者的左斜前方观察电动吸尘器1的图。
[0025]
此外,电动吸尘器1也能够将延长管3以及吸入口体5取下,仅以吸尘器主体2的形态作为手持型电动吸尘器加以利用。即,吸尘器主体2能够单独作为手持型电动吸尘器加以利用。此外,电动吸尘器1也能够代替延长管3以及吸入口体5,而安装与延长管3相比为极短的喷嘴来使用。
[0026]
吸尘器主体2具备:具有把手部11的主体外壳12;收容于主体外壳12而产生吸入负压的电动鼓风机13;能够拆装地安装于主体外壳12,并且与电动鼓风机13的吸入侧流体地连接的分离集尘部15;经由分离集尘部15而与电动鼓风机13的吸入侧流体地连接的吸入管16;主要控制电动鼓风机13的主体控制部17;能够拆装地安装于主体外壳12的二次电池18;以及将分离集尘部15能够拆装地保持于主体外壳12的保持机构。
[0027]
吸尘器主体2利用二次电池18蓄积的电力使电动鼓风机13驱动,通过电动鼓风机13的驱动产生负压,使所产生的吸入负压作用于分离集尘部15。作用于分离集尘部15的吸入负压依次作用于吸入管16、延长管3以及吸入口体5。达到吸入口体5的吸入负压作用于吸入口体5的吸入口19。作用于吸入口19的吸入负压从地面将含有尘埃的空气(以下,称为“含尘空气”。)向吸入口19吸入。向吸入口19吸入的含尘空气通过吸入口体5、延长管3以及吸入管16而向分离集尘部15流入。分离集尘部15从通过吸入负压吸入的含尘空气中分离尘埃,对分离后的尘埃进行捕集并蓄积,并且将分离了尘埃后的空气向电动鼓风机13输送。电动鼓风机13将分离了尘埃后的空气向主体外壳12外排气。
[0028]
此外,电动吸尘器1以及吸尘器主体2由手持吸尘器主体2的使用者以各种姿势加以利用。因此,在图1中,将实线箭头p方向视图设为平面视图(俯视图),将实线箭头p的相反方向视图设为仰视图。在图1中,将实线箭头f方向视图设为主视图(前面视图),将实线箭头f的相反方向视图设为背面视图。在图1中,将实线箭头l方向视图设为左视图,将实线箭头l的相反方向视图设为右视图。即,在使用者以延长管3朝向使用者的前方水平地突出的姿势拿着电动吸尘器1的情况下,电动吸尘器1的前后、上下、左右与使用者的前后、上下、左右一致。
[0029]
主体外壳12收容电动鼓风机13以及安装有主体控制部17的控制电路板21。主体外壳12具备:配置在延长管3的延长线上且沿着延长管3的延长线延伸的柱状的前部12a;从前部12a向斜下后方垂下的中央部12b;从中央部12b的背面的下半部分向后方延伸的筒状的后部12c;以及从中央部12b的背面的上半部分向后方延伸,弯曲为圆弧形状而与后部12c的上表面的后端相连的把手部11。
[0030]
此外,主体外壳12具备向二次电池18导入充电电力的充电插座。充电插座经由充电电路而与二次电池18连接。
[0031]
并且,主体外壳12具备输入部22,该输入部22配置在握着把手部11的使用者的手指能够到达的范围。
[0032]
前部12a与中央部12b相配合而能够拆装地保持分离集尘部15。分离集尘部15整体具有筒状的外观。前部12a与中央部12b使分离集尘部15的中心线c与延长管3的中心线的延长线平行地保持分离集尘部15。在延长管3以及分离集尘部15安装于主体外壳12的状态下,延长管3的中心线的延长线以及分离集尘部15的中心线c配置在将主体外壳12左右实质均等地断开的中央纵截面上。该中央纵截面穿过长条状的前部12a的中心线以及筒状的分离集尘部15的中心线。即,长条状的前部12a与筒状的分离集尘部15以中心线平行的方式并排设置。
[0033]
主体外壳12的前部12a收容吸入管16。吸入管16配置在延长管3的长边方向、即延长管3的延伸方向的延长线上而延伸为管状。
[0034]
主体外壳12的后部12c收容电动鼓风机13以及控制电路板21。后部12c具有将电动
鼓风机13的排气从主体外壳12内排出的排气口25。
[0035]
主体外壳12的中央部12b以将与前部12a并排设置的分离集尘部15的后端部的一部分遮蔽的方式进行保持,且收容将分离集尘部15与电动鼓风机13相连的风路(图示省略)。中央部12b与实质以直线状延伸的前部12a的后端部连接而向主体外壳12的斜下后方膨胀。中央部12b具有朝向主体外壳12的后方以向后方降低的方式倾斜的外观。
[0036]
吸入管16收容在主体外壳12的前部12a内收容而支承于主体外壳12。在分离集尘部15安装于主体外壳12的状态下,吸入管16与分离集尘部15平行地排列。吸入管16是实质无弯曲而笔直地延伸的直管。沿着吸入管16的中心线的方向、吸入管16的延伸方向、吸入管16的长边方向实质上为相同含义,并与主体外壳12的前后方向实质一致。
[0037]
吸入管16具备能够使延长管3拆装的接头构造。该接头构造设置于吸入管16的开口端部。吸入管16是吸尘器主体2的流体的入口,也是将延长管3与分离集尘部15流体地连接的接头。通过从吸尘器主体2取下延长管3,由此吸入管16作为使吸尘器主体2作为手持型电动吸尘器而单体使用时的吸入口起作用。吸入管16的筒前端向吸尘器主体2的前方开放。
[0038]
吸入管16的后端部具有与分离集尘部15连接的第二开口。第二开口朝向吸入管16的径向外侧开放。第二开口朝向主体外壳12的下方开放而朝向分离集尘部15。第二开口设置于主体外壳12的前部12a的底面。在主体外壳12安装有分离集尘部15的状态下,前部12a的底面与分离集尘部15接近而仿形。于是,第二开口与分离集尘部15流体地连接。
[0039]
分离集尘部15配置在主体外壳12的前部12a与主体外壳12的中央部12b所形成的l字形状的收容空间中。分离集尘部15从向吸尘器主体2流入的含尘空气中对尘埃进行分离、捕集、蓄积,而将除去了尘埃的清洁空气向电动鼓风机13输送。分离集尘部15是利用尘埃与空气之间的质量差异而对尘埃与空气进行离心分离的离心分离方式。在分离集尘部15的下游侧设置有从含尘空气中过滤出尘埃的过滤分离方式的过滤器。
[0040]
此外,分离集尘部15沿着主体外壳12的前后方向延伸为筒状。换言之,分离集尘部15是具有沿着主体外壳12的前后方向延伸的中心线c的筒形状的容器。沿着分离集尘部15的中心线c的方向、分离集尘部15的延伸方向、分离集尘部15的长边方向实质上为相同含义,与主体外壳12的前后方向实质一致。由此,分离集尘部15的中心线c与吸入管16的中心线实质平行。此外,分离集尘部15与吸入管16并排设置。即,分离集尘部15的长边方向对吸入管16的长边方向进行仿形。分离集尘部15的直径大于吸入管16的直径,分离集尘部15比吸入管16以及主体外壳12的前部12a向吸尘器主体2的左右方向(宽度方向)突出。此外,吸尘器主体2的左右方向(宽度方向)相当于实质上包含筒状的分离集尘部15的中心线c以及吸入管16的中心线的假想平面的法线方向,或者实质上穿过筒状的分离集尘部15的中心线c以及吸入管16的中心线的假想平面的法线方向。此外,该假想的平面相当于吸尘器主体2的中央纵截面。
[0041]
保持机构具备:将分离集尘部15的一方的端部与主体外壳12能够拆装地连结的第一机构;以及将分离集尘部15的另一方的端部与主体外壳12能够拆装地连结的第二机构。
[0042]
第一机构是在设置于分离集尘部15的凹部中钩挂设置于主体外壳12的凸部而将分离集尘部15与主体外壳12连结的机构。第一机构的凹部和凸部,通过分离集尘部15与主体外壳12之间的相对位置变化而钩挂、或者脱离。
[0043]
第一机构的凸部设置于主体外壳12的前部12a的底面的前端部。第一机构的凹部
配置于分离集尘部15的一方的端部、且与凸部相匹配的位置。
[0044]
第二机构是向设置于分离集尘部15的凸部钩挂设置于主体外壳12的凹部而将分离集尘部15与主体外壳12连结的锁定机构。第二机构与第一机构不同,具备在保持分离集尘部15与主体外壳12之间的相对位置不变的情况下能够使凸部从凹部脱离的操作片。操作片设置于分离集尘部15,第二机构的凸部与操作片一体化。
[0045]
第二机构的凹部设置于主体外壳12的中央部12b的底部,即在吸入管16的径向上离吸入管16最远的部位。第二机构的凸部配置于分离集尘部15的另一方的端部,且是与凹部相匹配的位置。然后,第一机构的凹部与第二机构的凸部均设置于分离集尘部15,并且相对于分离集尘部15的长边方向的中心且是短边方向的中心实质对称地配置。此外,从第一机构的凹部观察,第二机构的凸部在分离集尘部15内配置于最远离的部位。
[0046]
操作片是能够进行伴随着包含滑动、摆动在内的机械式移动的操作,并将伴随着该操作的移动转换为使凸部从凹部脱离的动作的各种机构的一部分。例如,使用者通过使操作片滑动,由此能够使第二机构的凸部从凹部脱离。此外,操作片在未被使用者操作的情况下,使第二机构的凸部向与凹部钩挂的位置移动。
[0047]
在分离集尘部15安装于主体外壳12的情况下,第一机构将凸部钩挂于凹部而将分离集尘部15与主体外壳12连结,第二机构将凸部钩挂于凹部而将分离集尘部15与主体外壳12连结。然后,当操作片被操作而第二机构的凸部从第二机构的凹部脱出时,第二机构的锁定被解除。此时,第一机构的凸部维持钩挂于凹部的状态。因此,使用者在第二机构的锁定被解除的状态下,以第一机构为支点使分离集尘部15的另一方的端部远离主体外壳12。于是,分离集尘部15远离主体外壳12,最终第一机构的凸部从凹部脱出而第一机构的锁定也被解除。
[0048]
在分离集尘部15从主体外壳12脱离的情况下,首先第一机构的凸部钩挂于凹部。使用者在第一机构被锁定的状态下,以第一机构为支点使分离集尘部15的另一方的端部接近主体外壳12。于是,分离集尘部15安装于主体外壳12,最终第二机构的凸部钩挂于凹部而第二机构也被锁定。
[0049]
此外,本实施方式的分离集尘部15在描绘圆弧轨道的同时相对于主体外壳12拆装,但也可以在向吸入管16的径向描绘直线轨道的同时拆装。在该情况下,第一机构以及第二机构优选实质同时被锁定或者将锁定解除。相对于主体外壳12拆装分离集尘部15时的分离集尘部15的移动方向,只要是与吸入管16的长边方向交叉的方向即可。由此,在向主体外壳12安装分离集尘部15时,分离集尘部15在吸入管16的径向上向接近吸入管16的方向移动,在使分离集尘部15从主体外壳12脱离时,分离集尘部15在吸入管16的径向上向远离吸入管16的方向移动即可。
[0050]
主体外壳12的中央部12b具备:与分离集尘部15的排气侧流体地连接的连结口;以及将连结口与电动鼓风机13流体地连接的分离部下游风路管。中央部12b包含夹入在分离集尘部15与主体外壳12的后部12c之间的部位。在该部位配置有连结口以及分离部下游风路管。
[0051]
连结口配置于面向中央部12b的正面的部位。在分离集尘部15安装于主体外壳12的状态下,连结口与分离集尘部15的后侧的端面正对。由此,在分离集尘部15安装于主体外壳12的状态下,连结口配置在分离集尘部15的中心线c的延长线上。
[0052]
电动鼓风机13的吸入侧经由连结口以及分离部下游风路管而与分离集尘部15连接。电动鼓风机13从分离集尘部15吸入空气而产生吸入负压。电动鼓风机13具备叶轮、产生叶轮的旋转驱动力的电动机、以及从电动机向叶轮传递旋转驱动力的旋转轴。
[0053]
叶轮例如为涡轮风扇,具备多个叶片。各个叶片具有从圆锥状的轮轴的中心部朝向轮轴的外边缘部逐渐朝向轮轴的径向直立的扭转的形状。换言之,各个叶片是从前缘到后缘而翼型(airfoil)或者翼截面(wing section)发生变化的所谓的三维翼。叶轮被具有吸入口的外壳覆盖。
[0054]
电动鼓风机13具有以旋转轴为中心的圆筒状或者圆柱状的形状。使旋转轴的中心线朝向主体外壳12的前后方向且使吸入口朝向前方而收容于主体外壳12。此外,电动鼓风机13的旋转轴的中心线实质配置在分离集尘部15的延长线c上。
[0055]
主体外壳12的后部12c收容安装有主体控制部17的控制电路板21。控制电路板21配置在电动鼓风机13的正后方。
[0056]
主体控制部17具备微处理器、以及存储微处理器所执行的各种运算程序、参数等的存储装置。存储装置存储与预先设定的多个运转模式相关的各种设定、即自变量。多个运转模式与电动鼓风机13的输出建立关联。各个运转模式被设定有相互不同的输入值、即电动鼓风机13的输入值且是在电动鼓风机13中流动的电流目标值。各个运转模式与输入部22受理的操作输入建立关联。主体控制部17从预先设定的多个运转模式中择一地选择出与向输入部22的操作输入对应的任意的运转模式,从存储部读出所选择的运转模式的设定,根据所读出的运转模式的设定使电动鼓风机13运转。
[0057]
在分离集尘部15安装于主体外壳12的状态下,主体外壳12的后部12c配置于分离集尘部15的中心线c的延长线上。
[0058]
二次电池18也被称为蓄电池、充电式电池以及充电池。二次电池18蓄积由电动鼓风机13、主体控制部17消耗的电力。二次电池18能够拆装地安装在主体外壳12的后部12c的底部。二次电池18也可以无法拆装地固定。能够拆装的二次电池18也可以准备多个二次电池18,由此能够适当地更换而利用。在安装于电动吸尘器1的二次电池18的充电率降低的情况下,将该二次电池18更换为充电完成的二次电池18,由此电动吸尘器1能够继续运转。
[0059]
此外,电动吸尘器1也可以代替二次电池18而将一次电池作为电源加以利用。
[0060]
把手部11一体地设置于主体外壳12。把手部11是为了通过电动吸尘器1对地面进行吸尘而供使用者用手把持的部分。因此,把手部11优选具有容易用人的手指把持的适当形状。
[0061]
把手部11架设在主体外壳12的前部12a与后部12c之间。把手部11从前部12a的后端向延长管3的延长方向延伸,并且在弯曲为弧状之后与后部12c的后端部相连。在把手部11与主体外壳12的中央部12b的背面之间以及把手部11与主体外壳12的后部12c的顶面之间,向主体外壳12的左右方向(宽度方向)贯通有连续的空间。在该空间中配置握住把手部11的使用者的手指、主要是包含食指、中指、无名指以及小指在内的四个手指。
[0062]
输入部22设置在把手部11的前侧端部的顶面,以便握住把手部11的使用者能够通过其大拇指容易地进行操作。
[0063]
输入部22具备:受理电动鼓风机13的运转开始操作的运转开始开关22a;以及受理电动鼓风机13的运转停止操作的运转停止开关22b。运转开始开关22a以及运转停止开关
22b与主体控制部17电连接。电动吸尘器1的使用者能够对输入部22进行操作而择一地选择电动鼓风机13的运转模式。运转开始开关22a在电动鼓风机13的运转中还作为运转模式的切换开关起作用。在该情况下,主体控制部17每当从运转开始开关22a受理操作信号时就将运转模式依次切换为强
→
中
→
弱
→
强
→
中
→
弱
→……
。换言之,运转开始开关22a对电动鼓风机13的启动以及电动鼓风机13的运转输出变更中的至少任一方进行指示。此外,输入部22也可以代替运转开始开关22a,而分别独立地具备强运转开关(图示省略)、中运转开关(图示省略)以及弱运转开关(图示省略)。
[0064]
延长管3以及吸入口体5通过从电动鼓风机13作用的负压,将地面上的尘埃与空气一起吸入并向吸尘器主体2引导。
[0065]
延长管3经由吸尘器主体2的吸入管16以及分离集尘部15而与电动鼓风机13的吸入侧流体地连接。延长管3具有在使用者把持了吸尘器主体2的把手部11的状态下实质地达到地面的长度。在延长管3的一方的端部设置有相对于吸尘器主体2的吸入管16拆装自如的接头构造。在延长管3的另一方的端部设置有使吸入口体5拆装自如的接头构造。延长管3可以能够伸缩、也可以并非如此。
[0066]
吸入口体5在木地板、地毯等地面上行驶自如或者滑行自如,且在行驶状态或者滑行状态下与地面对置的底面上具有吸入口19。此外,吸入口体5具备:配置于吸入口19的能够旋转的旋转清扫体28;以及作为使旋转清扫体28驱动的驱动源的电动机29。在吸入口体5的一方的端部设置有相对于延长管3的另一方的端部拆装自如的接头构造。吸入口体5经由延长管3、吸入管16以及分离集尘部15而与电动鼓风机13的吸入侧流体地连接。吸入口体5、延长管3、吸入管16以及分离集尘部15是从吸入口19到达电动鼓风机13的吸入风路。
[0067]
电动吸尘器1在运转开始开关22a被操作时使电动鼓风机13启动。例如,电动吸尘器1为,当在电动鼓风机13停止的状态下运转开始开关22a被操作时,首先使电动鼓风机13在强运转模式下启动,当运转开始开关22a再次被操作时,将电动鼓风机13的运转模式变更为中运转模式,当运转开始开关22a第三次被操作时,将电动鼓风机13的运转模式变更为弱运转模式,以下同样地反复。强运转模式、中运转模式以及弱运转模式是预先设定的多个运转模式。对于电动鼓风机13的输入值,在强运转模式下最大,在弱运转模式下最小。启动后的电动鼓风机13从分离集尘部15吸入空气,使分离集尘部15内成为负压。
[0068]
分离集尘部15内的负压依次通过吸入管16、延长管3以及吸入口体5而作用于吸入口19。电动吸尘器1通过作用于吸入口19的负压,将地面上的尘埃与空气一起吸入而对地面进行吸尘。分离集尘部15从电动吸尘器1所吸入的含尘空气中对尘埃进行分离、蓄积,而将从含尘空气中分离出的空气向电动鼓风机13输送。电动鼓风机13将从分离集尘部15吸入的空气向吸尘器主体2外排气。
[0069]
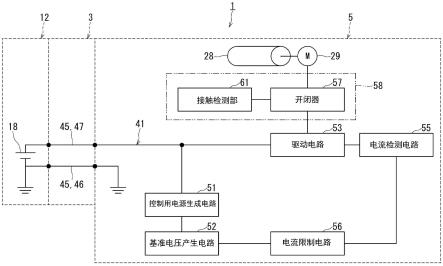
图2是本发明的实施方式的电动吸尘器的吸入口体的控制框图。
[0070]
如图2所示那样,本实施方式的吸入口体5为,通过从安装于吸尘器主体2的二次电池18供给的电力使电动机29驱动。吸入口体5具备:旋转清扫体28;产生使旋转清扫体28旋转驱动的驱动力的电动机29;以及对电动机29的运转进行控制的吸入口体控制部41。
[0071]
旋转清扫体28具备轴以及从轴以放射状延伸的大量刷毛。在吸入口体5与地面接触的情况下,吸入口体5向吸入口19外侧突出的旋转扫体28的一部分、即刷毛的一部分与地面接触。因此,在吸入口体5与地面接触的情况下,当电动机29使旋转清扫体28旋转时,通过
旋转清扫体28的旋转而刷毛的前端不断地擦拭地面。在吸入口体5从地面分离的情况下,旋转清扫体28也从地面分离。
[0072]
吸入口体控制部41通过穿过延长管3而到达吸尘器主体2的两根电线45与二次电池18电连接。两根电线45中的一方是接地侧电线46,两根电线45中的另一方是非接地侧电线47。此外,吸入口体控制部41也可以与主体控制部17一起安装于主体外壳12内的控制电路板21。换言之,吸入口体控制部41也可以设置于吸尘器主体2。
[0073]
吸入口体控制部41在运转开始开关22a被操作的情况下使电动机29启动。电动吸尘器1也可以与运转开始开关22a相独立地具备对电动机29的启动以及电动机29的运转输出变更中的至少任一方进行指示的电动机用开关。在该情况下,吸入口体控制部41在电动机用开关被操作的情况下使电动机29启动。
[0074]
吸入口体控制部41具备:使从二次电池18供给的电力降压而输出控制用的电力的控制用电源生成电路51;输出基准电压的基准电压产生电路52;电动机29的驱动电路53;检测在电动机29中流动的电流的电流检测电路55;限制在电动机29中流动的电流的电流限制电路56;以及对与电动机29相连的供电电路进行开闭的开闭器57。
[0075]
基准电压产生电路52为将矩形波的上升向电流限制电路56进行指示的矩形波。
[0076]
电流检测电路55将与在电动机29中流动的电流的检测结果相关的电压值向电流限制电路56输出。电流检测电路55包括将在电动机29中流动的电流转换为电压的分流电阻、以及将由分流电阻转换后的电压放大而向对应的电流限制电路56输出的放大电路。放大电路是所谓的差动放大电路。
[0077]
电流限制电路56根据以电流检测电路55的输出电压为基础的矩形波的下降电压值定时以及基准电压产生电路52输出的矩形波的上升定时,生成用于使驱动电路53的开关元件进行开关的矩形波。即,电流限制电路56使用于使驱动电路53驱动的pwm信号的占空比提高降低。
[0078]
驱动电路53包括对向电动机29输入的电力进行开关的开关元件。驱动电路53通过脉冲宽度调制控制对开关元件进行开闭。开关元件对从二次电池18向对应的电动机29供给驱动电力的非接地侧电线47进行开闭。开关元件是mosfet(metal-oxide-semiconductor field-effect transistor)等元件。开关元件具备与对应的电流限制电路56连接的栅极。开关元件根据栅极电流或者栅极电压的变化而使电动机29的输入(驱动电流)改变。
[0079]
开闭器57是在吸入口体5从地面分离的情况下,将向电动机29的电力供给断开而使旋转清扫体28的旋转驱动停止的安全装置58的一部分。安全装置58具备开闭器57以及接触检测部61,该接触检测部61能够使吸入口体5相对于底面的突出量变化,而检测吸入口体5是否与地面接触。在接触检测部61检测出吸入口体5使底面与地面接触的情况下,安全装置58将开闭器57闭合而允许向电动机29的电力供给,在接触检测部61检测出吸入口体5从底面分离的情况下,安全装置58将开闭器57断开而切断向电动机29的电力供给。此外,在吸入口体5使底面朝向上方的情况下,安全装置58也将开闭器57断开而将向电动机29的电力供给切断。
[0080]
然而,作为使旋转清扫体28接触的被接触面即地面的代表例,已知有地板以及地毯。地板比地毯平滑,地毯一般立起有绒毛而具有凹凸。因此,地板和旋转清扫体28之间的旋转阻力比较小,地毯和旋转清扫体28之间的旋转阻力与地板和旋转清扫体28之间的旋转
阻力相比为极大。由此,电动机29必须从旋转清扫体28的旋转阻力大小的观点出发在具有不同性质的多种地面上使旋转清扫体28旋转驱动。
[0081]
图3是表示本发明的实施方式的电动吸尘器执行的电动机的输入控制的一个例子的流程图。
[0082]
因此,如图3所示那样,本实施方式的电动吸尘器1的电流限制电路56为,在电动机29旋转驱动的情况下,根据电流检测电路55的输出结果即在电动机29中流动的电流值,来推断旋转清扫体28的旋转阻力的大小即电动机29的负荷扭矩,进而推断旋转清扫体28正接触的地面的种类而使向电动机29的供给电力增减。电流检测电路55作为如下的检测部起作用:作为能够对旋转清扫体28相对于旋转清扫体28所接触的被接触面的旋转阻力的大小进行辨别的物理量,对在电动机29中流动的电流值进行检测。例如,在旋转阻力较小的地板的情况下,电流限制电路56将向电动机29的供给电力抑制得较低,在旋转阻力较大的地毯的情况下,电流限制电路56提高向电动机29的供给电力。
[0083]
在此,将旋转清扫体28的旋转阻力较小的地板设为第一被接触面,旋转清扫体28的旋转阻力较大的地毯设为第二被接触面,使与地板接触的旋转清扫体28旋转驱动的情况下的电动机29的输入设为第一输入,使与地毯接触的旋转清扫体28旋转驱动的情况下的电动机29的输入设为第二输入。此时,旋转清扫体28和第二被接触面之间的旋转阻力大于旋转清扫体28和第一被接触面之间的旋转阻力,使与第二被接触面接触的旋转清扫体28旋转驱动的电动机29的第二输入,大于使与第一被接触面接触的旋转清扫体28旋转驱动的电动机29的第一输入。
[0084]
具体地说,电流限制电路56判断电动机29的电流值是否大于零值(步骤s1)。如果电动机29使旋转清扫体28旋转驱动,则步骤s1为肯定。在安全装置58的开闭器57断开而未向电动机29供给电力的情况、未安装吸入口体5的情况下,步骤s1为否定(步骤s1的否),重复进行处理。
[0085]
在步骤s1为肯定的情况下(步骤s1的是),电流限制电路56基于在电动机29中流动的电流值来推断旋转清扫体28所接触的地面种类(步骤s2)。步骤s2中的地面种类根据多个条件来推断。例如,第一条件为在电动机29中流动的电流值的当前的大小。第二条件是从追溯了规定的地面推断时间的时间起到当前为止的时间,例如3秒间在电动机29中流动的电流值的变化量的大小。在作为第一条件而在电动机29中流动的电流值的当前值为预先确定的阈值以上的状态持续了一定时间以上的情况下,且作为第二条件而在从追溯了规定的地面推断时间的时间起到当前为止的时间中在电动机29中流动的电流值的变化量的大小为预先确定的第二阈值以上的情况下,将旋转清扫体28所接触的地面的种类推断为第二被吸尘面即地毯。此外,在任一个的条件都不满足的情况下,将旋转清扫体28所接触的地面的种类推断为第一被吸尘面即地板。
[0086]
换言之,电流限制电路56根据多个条件对旋转阻力不同的地面进行辨别而对电动机29的输入的大小进行控制。
[0087]
此外,对旋转清扫体28所接触的地面的种类进行推断的方法,不限于基于在电动机29中流动的电流。电流限制电路56能够利用已知的地面推断方法。例如,也可以采用如下方法:利用摄像机对吸入口体5周围进行摄影,对所摄影的图像进行分析,由此对吸入口体5所接触的地面的种类进行推断。与地毯相比地板更容易反射光,因此通过对摄像机所摄影
的图像进行分析,能够推断出地面的种类。此外,也可以采用如下方法:将光发射机以及受光器配置在吸入口体5周围,根据受光器接受到的光量来推断地面的种类。与地毯相比地板更容易反射光,因此能够根据反射率来推断地面的种类。
[0088]
然后,电流限制电路56为,在步骤s2中推断出的地面种类为第二被接触面的情况下(步骤s3的是),将向电动机29供给的电力设定为第二输入(步骤s4),返回步骤s1而重复进行处理。即,判断为旋转清扫体28正与旋转阻力较大的第二被接触面即地毯接触,而将向电动机29供给的电力设定得较大。另一方面,电流限制电路56为,在步骤s2中推断出的地面种类不是第二被接触面的情况下(步骤s3的否),将向电动机29供给的电力设定为第一输入(步骤s5),返回步骤s1而重复进行处理。即,判断为旋转清扫体28正与旋转阻力较小的第一被接触面即地板接触,而将向电动机29供给的电力设定得较小。
[0089]
这些的第一被接触面的旋转阻力、第二被接触面的旋转阻力、第一输入以及第二输入之间的大小关系,不限定于被接触面的具体例即地板以及地毯。即,电流限制电路56为,旋转清扫体28的旋转阻力越大,则将电动机29的输入设定得越大。在这样的电动机29的输入控制中,作为对象的被接触面的种类也可以为3种以上的多种。此外,电动机29的输入控制为,可以按照被接触面的每个种类而阶段性地变更,也可以根据旋转清扫体28的旋转阻力而连续且线性地变更。
[0090]
此外,在步骤s1为否定(步骤s1的否),且超过了预先确定的持续停止时间的情况下,电流限制电路56也可以对驱动电路53的开关元件进行控制而将向电动机29的电力供给切断。
[0091]
然而,电动机29为,例如当吸入口体5从地面分离,安全装置58的开闭器57断开时,电力的供给被切断而停止。然后,当吸入口体5再次与地面接触,安全装置58的开闭器57闭合时,得到电力的供给而再次启动。
[0092]
以往的电动吸尘器为,在该电动机的再次启动时为了避免浪涌电流变得过大而使向电动机供给的电力减小为小于基准电流的第一电力。因此,例如,当旋转清扫体与地毯那样旋转阻力较大的地面接触时,有可能电动机的再次启动被妨碍,成为低速旋转而无法充分地将尘埃挠出,或者保持停止状态。如果电动机的再次启动被妨碍,则在电动机中流动的电流值瞬间上升而变得比基准电流大数倍,如果放置不管则会超过可能致使电动机烧损的异常电流,因此控制部将向电动机的电力供给强制地切断。由此,无法进行大于第一电力的第二电力的供给,电动机的再次启动变得更加困难。并且,暂时从地面分离的吸入口体5,不一定再次与相同性质的地面接触。例如,在从旋转阻力较小的地板分离之后,有可能再次与旋转阻力较大的地毯接触。
[0093]
图4是表示本发明的实施方式的电动吸尘器执行的电动机的再次启动控制的一个例子的流程图。
[0094]
因此,如图4所示那样,本实施方式的电动吸尘器1的吸入口体控制部41为,在使与被接触面接触的旋转清扫体28启动的情况下,使电动机29暂时以大于第一输入的第三输入启动。
[0095]
此外,吸入口体控制部41为,当在电动机29的旋转驱动中旋转清扫体28从地面分离的情况下,使电动机29停止,且在预先确定的规定第一时间以内旋转清扫体28再次与被接触面接触的情况下,使电动机29以停止前的输入再次启动,另一方面,在超过规定的第一
时间而旋转清扫体28再次与地面接触的情况下,使电动机29以第三输入再次启动。
[0096]
并且,吸入口体控制部41为,按照多个条件对旋转阻力不同的地面进行辨别而对电动机29的输入的大小进行控制,另一方面,在以第三输入使电动机启动后的预先确定的规定的第二时间以内,使条件缓和而对旋转阻力不同的地面进行辨别。
[0097]
具体地说,吸入口体控制部41为,例如当吸入口体5从地面分离且安全装置58的开闭器57断开时(步骤s11的是),开始第一计时器的计时(步骤s12)。此时,电动机29的电力供给被切断而停止。
[0098]
接着,吸入口体控制部41为,在第一计时器超过了规定的第一时间的情况下(步骤s13的是),将向电动机29供给的输入设定为第三输入(步骤s14)。在执行了步骤s14的情况下,设立表示向电动机29供给的输入被设定为第三输入的信息、所谓的标志。
[0099]
第三输入优选包含全部有可能使旋转清扫体28接触的地面的性质,且优选即使是旋转阻力最大的地面也能够使电动机29启动的输入值。例如,在限于作为第一被接触面的地板和作为第二被接触面的地毯来考虑的情况下,只要能够在旋转清扫体28与地毯接触的状态下使电动机29启动即可。在这种情况下,如果第三输入为第二输入以上,则旋转清扫体28无论与地板以及地毯中的哪个接触,都能够使电动机29可靠地启动。
[0100]
此外,吸入口体控制部41为,在第一计时器为规定的第一时间以内的情况下(步骤s13的否),不使向电动机29供给的输入变更,而维持通过步骤s11使电动机29停止紧前的输入。
[0101]
接着,吸入口体控制部41为,例如当吸入口体5与地面接触而安全装置58的开闭器57闭合时(步骤s15的是),开始第二计时器的计时(步骤s16)。此时,电动机29再次开始电力的供给而再次启动。
[0102]
即,吸入口体控制部41为,在吸入口体5由于地面的凹凸(小地毯、浴垫的凹凸)而非意图地浮起、或者为了避免误吸引而暂时被抬起并从地面分离,且在规定的第一时间以内再次与地面接触的情况下,不使电动机29的输入变更,而以吸入口体5从地面分离紧前的输入值即第一输入或者第二输入使电动机29再次启动,另一方面,在吸入口体5从地面分离并进行移动等而超过规定的第一时间之后再次与地面接触的情况下,将电动机29的输入变更为第三输入而使电动机29再次启动。
[0103]
此外,第一计时器的计时与第二计时器的计时不同时进行。由此,第一计时器以及第二计时器也可以是同一个计时器。
[0104]
此外,吸入口体控制部41为,为了抑制安全装置58的开闭器57刚刚闭合之后向电动机29的浪涌电流,也可以使电动机29的输入朝向第三输入逐渐上升。在该情况下,电动机29的输入从能够抑制向电动机29的浪涌电流的水准到达第三输入为止,例如优选为0.5秒以内。
[0105]
在电动机29再次启动之后,吸入口体控制部41判断是否设立有表示向电动机29供给的输入被设定为第三输入的信息(步骤s17)。
[0106]
在未设立表示向电动机29供给的输入被设定为第三输入的标志的情况下(步骤s17的否),吸入口体控制部41转移到图3所示的电动机29的输入控制(步骤s18),并使再次启动控制结束。
[0107]
另一方面,在设立有表示向电动机29供给的输入被设定为第三输入的标志的情况
下(步骤s17的是),吸入口体控制部41为,到第二计时器超过规定的第二时间为止(步骤s19的是),使图3所示的电动机29的输入控制的步骤s2中的地面种类的推断条件缓和,而执行电动机29的输入控制(步骤s20)。此外,吸入口体控制部41为,当第二计时器超过规定的第二时间时(步骤s19的否),转移至图3所示的电动机29的输入控制(步骤s18),并使再次启动控制结束。
[0108]
该步骤s20中的推断条件的缓和是指,将多个条件中的至少一个条件排除而对地面的种类进行判定。在通常的步骤s2中,在作为第一条件而在电动机29中流动的电流值的当前值为预先确定的阈值以上的状态持续了一定时间以上的情况下,且在作为第二条件而从追溯了规定的地面推断时间的时间起到当前为止的时间中在电动机29中流动的电流值的变化量的大小为预先确定的第二阈值以上的情况下,将旋转清扫体28所接触的地面的种类推断为作为第二被吸尘面的地毯。在缓和后的推断条件下,例如将第二条件排除,仅根据第一条件来推断地面。即,吸入口体控制部41为,在第二计时器超过规定的第二时间之前(步骤s19的是),在作为第一条件而在电动机29中流动的电流值的当前值为预先确定的阈值以上的状态持续了一定时间以上的情况下,将旋转清扫体28所接触的地面的种类推断为作为第二被吸尘面的地毯,在不满足第一条件的情况下,将旋转清扫体28所接触的地面的种类推断为作为第一被吸尘面的地板。此外,吸入口体控制部41为,当第二计时器超过规定的第二时间时(步骤s19的否),使步骤s2的推断条件返回原来的多个条件。
[0109]
第二时间优选被设定为与步骤s2的第二条件中的地面推断时间相同。
[0110]
图5至图8是将本发明的实施方式的电动机的再次启动控制与比较例的再次启动控制进行比较的示意图。
[0111]
比较例的再次启动控制为,当吸入口体5再次与地面接触时,为了抑制浪涌电流,而以较低的电流、例如在本实施方式中使与地板接触的旋转清扫体28旋转驱动的情况下的电动机29的第一输入,使电动机29启动。
[0112]
此外,在图5至图8的本实施方式的再次启动控制中,第三输入与第二输入被设定为相同的输入值。
[0113]
图5是表示与作为第二被接触面的地毯接触的吸入口体5从第二被接触面分离、并在第一计时器超过第一时间之后再次与作为第一被接触面的地板接触而电动机29再次启动的情况的图。
[0114]
如图5所示那样,在比较例中,当吸入口体5再次与第一被接触面(地板)接触时,使电动机29的输入从第二输入向第一输入降低而使电动机29再次启动。在该情况下,旋转清扫体28克服与地板之间的旋转阻力而容易地再次启动。
[0115]
此外,在本实施方式的电动吸尘器1中,当吸入口体5再次与第一被接触面(地板)接触时,将电动机29的输入从第二输入向第三输入(第三输入=第二输入)变更而使电动机29再次启动。在该情况下,旋转清扫体28克服与地板之间的旋转阻力而容易地再次启动。
[0116]
图6是表示与作为第二被接触面的地毯接触的吸入口体5从第二被接触面分离、并在第一计时器超过第一时间之后再次与作为第二被接触面的地毯接触而电动机29再次启动的情况的图。
[0117]
如图6所示那样,在比较例中,当吸入口体5再次与第二被接触面(地毯)接触时,使电动机29的输入从第二输入向第一输入降低而使电动机29再次启动。在该情况下,旋转清
扫体28必须克服与地毯之间的旋转阻力而再次启动。因此,在比较例中,旋转清扫体28无法克服旋转阻力而旋转,电动机29的再次启动有可能失败。
[0118]
另一方面,在本实施方式的电动吸尘器1中,当吸入口体5再次与第二被接触面(地毯)接触时,将电动机29的输入从第二输入向第三输入(第三输入=第二输入)变更而使电动机29再次启动。在本实施方式的电动吸尘器1中,旋转清扫体28容易克服与地毯之间的旋转阻力而再次启动。
[0119]
图7是表示与作为第一被接触面的地板接触的吸入口体5从第一被接触面分离、并在第一计时器超过第一时间之后再次与作为第一被接触面的地板接触而电动机29再次启动的情况的图。
[0120]
如图7所示那样,在比较例中,当吸入口体5再次与第一被接触面(地板)接触时,将电动机29的输入保持为第一输入不变而使电动机29再次启动。在该情况下,旋转清扫体28容易克服与地板之间的旋转阻力而再次启动。
[0121]
此外,在本实施方式的电动吸尘器1中,当吸入口体5再次与第一被接触面(地板)接触时,将电动机29的输入从第二输入向第三输入(第三输入=第二输入)变更而使电动机29再次启动。在该情况下,旋转清扫体28也极其容易地克服与地板之间的旋转阻力而再次启动。
[0122]
图8是表示与作为第一被接触面的地板接触的吸入口体5从第一被接触面分离、并在第一计时器超过第一时间之后再次与作为第二被接触面的地毯接触而电动机29再次启动的情况的图。
[0123]
如图8所示那样,在比较例中,当吸入口体5再次与第二被接触面(地毯)接触时,将电动机29的输入保持为第一输入不变而使电动机29再次启动。在该情况下,旋转清扫体28必须克服与地毯之间的旋转阻力而再次启动。因此,在比较例中,旋转清扫体28无法克服旋转阻力而旋转,电动机29的再次启动有可能失败。
[0124]
另一方面,在本实施方式的电动吸尘器1中,当吸入口体5再次与第二被接触面(地毯)接触时,将电动机29的输入从第一输入向第三输入(第三输入=第二输入)变更而使电动机29再次启动。在本实施方式的电动吸尘器1中,旋转清扫体28容易克服与地毯之间的旋转阻力而再次启动。
[0125]
如以上那样,本实施方式的电动吸尘器1为,在检测到旋转阻力较小的第一被接触面时将向电动机29供给的输入设为第一输入,在检测到旋转阻力大于第一被接触面的第二被接触面时将向电动机29供给的输入设为第二输入,此时,将第二输入控制得大于第一输入,且在使与地面接触的旋转清扫体28启动的情况下,使电动机29暂时以大于第一输入的第三输入启动。因此,电动吸尘器1为,能够克服地面和旋转清扫体28之间的旋转阻力而使电动机29可靠地启动,且能够兼顾与地面的性质相匹配的尘埃除去性能以及省电性。此外,在电动机29的启动时,旋转清扫体28向使吸入口体5前进的方向旋转。然后,在电动机29的启动时使电动机29暂时以大于第一输入的第三输入启动,由此电动吸尘器1在一般通过将吸入口体5推动前进而开始的吸尘中,能够对吸入口体5的开始运动进行辅助。
[0126]
此外,本实施方式的电动吸尘器1为,在使与地面接触的旋转清扫体28启动的情况下,使电动机29暂时以第二输入以上的第三输入启动。因此,电动吸尘器1能够克服地面和旋转清扫体28之间的旋转阻力而使电动机29更可靠地启动,并且能够兼顾与地面的性质相
匹配的尘埃除去性能和省电力性。
[0127]
并且,本实施方式的电动吸尘器1为,在旋转清扫体28与地面接触的情况下使电动机29启动。因此,电动吸尘器1为,在旋转清扫体28从地面分离的情况下能够使电动机29容易停止,且在旋转清扫体28再次与地面接触的情况下能够使电动机29容易地再次启动。
[0128]
此外,本实施方式的电动吸尘器1为,当在电动机29的旋转驱动中旋转清扫体28从地面分离的情况下,使电动机29停止,且在预先确定的第一时间以内旋转清扫体28再次与地面接触的情况下,使电动机29以停止前的输入再次启动,另一方面,在超过第一时间而旋转清扫体28再次与地面接触的情况下,使电动机29以第三输入再次启动。因此,电动吸尘器1为,在吸入口体5频繁地从地面分离、或者例如由于地毯的凹凸而暂时误检测为吸入口体5从地面分离那样的状况下,能够避免频繁地产生输入的切换。
[0129]
并且,本实施方式的电动吸尘器1为,与电动鼓风机13的启动以及电动鼓风机13的运转输出变更的至少任一方对应地使电动机29启动。因此,电动吸尘器1能够与用户对电动吸尘器1的吸尘开始的意图相适应地使旋转清扫体28容易地再次启动。
[0130]
此外,本实施方式的电动吸尘器1为,与受理旋转清扫体28的运转指示的电动机用开关对应地使电动机29启动。因此,电动吸尘器1能够与用户对电动吸尘器1的吸尘开始的意图相适应地使旋转清扫体28容易地再次启动。
[0131]
并且,本实施方式的电动吸尘器1为,根据多个条件对旋转阻力不同的地面进行辨别而对电动机29的输入的大小进行控制,另一方面,在从地面分离之后再次与地面接触而以第三输入使电动机29启动之后的预先确定的规定第二时间以内,使地面的辨别条件缓和而对旋转阻力不同的地面进行辨别。首先,根据多个条件对旋转阻力不同的地面进行辨别,能够使地面的辨别精度提高。如本实施方式的电动吸尘器1那样,在具有作为第一条件而在电动机29中流动的电流值的当前值为预先确定的阈值以上的状态是否持续了一定时间以上、作为第二条件而从追溯了规定的地面推断时间的时间起到当前为止在电动机29中流动的电流值的变化量的大小是否为预先确定的第二阈值以上的情况下,通过对第二条件下的随时间的变化进行监视,能够避免突发地满足第一条件而对地面进行误判定。另一方面,在从地面分离之后再次与地面接触而以第三输入使电动机29启动的情况下,使地面的辨别条件缓和而仅限定于第一条件,由此能够迅速地辨别出再次接触后的地面的种类而使电动机29的输入降低,提高省电性。
[0132]
由此,根据本实施方式的电动吸尘器1,能够与地面和旋转清扫体28之间的旋转阻力无关,使产生旋转清扫体28的旋转驱动的电动机29可靠地启动。
[0133]
对本发明的几个实施方式进行了说明,但这些实施方式是作为例子提示的,不意图限定发明的范围。这些新的实施方式能够以其他各种方式来实施,在不脱离发明的主旨的范围内能够进行各种省略、置换、变更。这些实施方式、其应变包含于发明的范围、主旨,并且包含于专利请求的范围记载的发明和其等同的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。