1.本发明涉及一种为车辆预测本车道的方法。
背景技术:
2.对车辆的本车道的确定及其在未来的预测是环境检测的基本元素,而因此也是针对自主驾驶的道路拓扑理解的基本元素。为此可以在简单的构型中将来自单摄像机的摄像机图像用于在图像中预测该车辆的本车道。借助于卷积神经网络(cnn)可以将这种任务描述为分类,在这些任务中,将单个的单镜头图像用作输入。然而该方法具有各种各样的弱点。对车道的经典的线探测通常是基于模型的,从而仅以羊角螺线反映的线能够被探测到。这大大限制了可能的车道标记候选人的搜索空间。然而,仅具有更高级别的道路是按照羊角螺线模型来建造的,例如高速公路。相反,城乡公路或更老的高速公路并非是按照这样的模型建造的,从而在此往往无法被探测到车道。该方法的另一问题是,并非在任何时候都能够通过寻找车道标记来实施设置。特别是建筑工地、更小的区县道路甚至城区道路和穿城道路常常是没有车道标记的。
技术实现要素:
3.因此,本发明的一个任务是,提供一种经改善的用于为车辆预测本车道的方法。
4.该任务通过一种用于为车辆预测本车道的方法来解决。有利实施方式能够通过在优选实施方式中所列举的措施实现。
5.根据本发明的一个方面,提供一种用于为车辆预测本车道的方法,该方法包括:
6.接收该车辆的至少一个摄像机传感器的反映可被该被车辆驶过的车道的至少一个拍摄图像;
7.通过对这些拍摄图像实施经训练的神经网络来求取延伸通过该车道的中心的中心迹线,其中,该神经网络借助回归被训练用于基于车道的拍摄图像来求取该车道的在该车道的中心延伸的中心迹线;
8.通过该神经网络输出多个描述该车道的中心迹线的参数;
9.基于该中心迹线的这些参数生成该中心迹线;
10.将该车道的中心迹线辨识为该车辆的本车道;和
11.提供该本车道。
12.由此能够实现如下技术优点:能够提供一种经改善的用于为车辆预测本车道的方法。为此,根据本发明的方法设置,将相应经训练的神经网络应用于车辆的至少一个摄像机传感器的拍摄图像,其中,这些拍摄图像反映可被该被车辆驶过的至少一个车道,并通过人工神经网络识别延伸通过该车道的中心的中心迹线。在拍摄该拍摄图像期间,该车道被该车辆驶过,即这些拍摄图像可以在该车辆的行驶期间被拍摄。但也可能在拍摄这些拍摄图像的期间该车道不被该车辆驶过,例如因为该车辆在进行拍摄的时间点才刚刚转弯到被反映的车道上或者因为该车辆在进行拍摄的时间点尚未活跃地起动。在此,该人工神经网络
借助回归被训练,以基于车道的拍摄图像来求取相应的中心迹线。对相应中心迹线的求取在此不是通过对拍摄图像进行分类来进行的,在该分类中,拍摄图像的像点要么被配属给待识别的中心迹线要么被配属给相应的背景。替代地,通过相应经训练的神经网络通过回归来进行对中心迹线的求取,其方式是:神经网络基于车道的拍摄图像求取多个参数,这些参数适合用于表示中心迹线。由神经网络所输出的多个参数随后被用于仿拟可被该被车辆驶过的中心迹线。在此基础上,车辆的根据本发明的待求取的本车道作为可被该被车辆驶过的车道的所求取到的中心迹线被辨识出。与从现有技术中已知的在现有的对象识别领域中的对拍摄图像的分类相比,通过使用相应经训练的人工神经网络的回归对表示中心迹线的参数所进行的求取能够实现如下技术优点:与对拍摄图像进行分类相比,需要更少的计算能力用于实施回归,其原因是,并非如通常在分类中的那样需要将每个像点配属给一个相应的类别。在此根据本发明,基于拍摄图像,人工神经网络并非如在现有技术中基于分类的对象识别的那样来识别实际被车辆驶过的车道,而是仅仅基于反映车辆车道的拍摄图像来求取延伸通过车道的中心的中心迹线,并相应地输出表征该中心迹线的参数作为输出。因为神经网络不是必须能够精确地识别拍摄图像的车道,所以根据本发明的方法不依赖于存在于拍摄图像中的、从现有技术中已知的用于识别可被车辆驶过的车道的车道识别方法所需要的行驶道路边界或行驶道路标记。因为根据本发明的方法仅设置为,求取表示在拍摄图像中所反映的车道的中心的中心迹线或者说其在拍摄图像内的位置中心迹线,并将中心迹线辨识为车辆的本车道,所以根据本发明的方法不限于按照羊角螺线模型所建造的车道或行驶道路。从现有技术中通常所已知的用于基于由拍摄图像进行对象识别来预测本车道的方法需要相应的模型描述用于生成本车道,而因此主要受限于同样按照相应的羊角螺线模型所构建的道路引导。相反,根据本发明的方法能够应用于任何道路引导或者说车道上,特别是应用于没有相应的行驶道路边界或行驶道路标记的、并非按照羊角螺线模型所建造的车道上。
13.在本技术的意义上,车道是道路的行驶道路或者说行车带,或者是可被车辆驶过的路段。
14.在本技术的意义上,车道的中心迹线是延伸通过该车道的中心的线元素或面元素。该车道的中心及与此相关的该车道的中心迹线沿该车道的纵轴线延伸。
15.在本技术的意义上,本车道是车辆的本身行驶轨迹,并且说明要通过该车辆来满足的行驶方向。
16.在本技术的意义上,拍摄图像是车辆的视频摄像机的拍摄视频,并且可以通过这些拍摄视频中的至少一个帧或多个在时间上彼此相继的帧给出。
17.根据一种实施方式,中心迹线的多个参数包括拍摄图像的多个像点,其中,所述多个像点代表在拍摄图像中的中心迹线,并且其中,对多个参数的输出包括:
18.通过神经网络输出多个x坐标和多个y坐标,其中,这些x坐标和y坐标定义在所述拍摄图像中的多个像点。
19.由此能够实现如下技术优点:能够精确地求取中心迹线,并与此相关地使得能够实现精确地求取车辆的本车道。为此,神经网络输出拍摄图像的多个x坐标和y坐标作为反映中心迹线的参数,其中,这些x坐标和y坐标定义拍摄图像的、通过其表示拍摄图像中的中心迹线的像点。通过相应输出的中心迹线像点的x坐标和y坐标,能够在拍摄图像中精确地
定位中心迹线和本车道。
20.根据一种实施方式,生成中心迹线包括:
21.通过n阶多项式函数连接拍摄图像的由多个x坐标和y坐标所代表的像点;和其中,将中心迹线辨识为本车道包括:
22.将该多项式函数的走向辨识为本车道。
23.由此能够实现如下技术优点:能够精确地生成中心迹线,并与此相关地精确地求取本车道。通过使用相应的n阶多项式函数连接拍摄图像的代表中心迹线的像点的x-y坐标,能够实现中心迹线的连贯走向。通过将代表中心迹线的多项式函数走向辨识为本车道,能够实现本车道在拍摄图像中的连贯走向。
24.根据一种实施方式,所述多个参数包括多项式函数或样条函数或羊角螺线函数的多个参数,其中,所述多项式函数、样条函数和羊角螺线函数设置为用于表示中心迹线,并且其中,中心迹线的生成包括:
25.以所求取到的参数实施这些多项式函数或样条函数或羊角螺线函数,并生成所述多项式函数的或样条函数的或羊角螺线函数的走向。
26.由此能够实现如下技术优点:能够精确地确定在拍摄图像内的中心迹线,并与此相关地使得能够实现精确地求取本车道。由此,替代于在上述实施方式中所输出的、拍摄图像的反映中心迹线的像点的x-y坐标,输出多项式函数的和/或样条函数的和/或羊角螺线函数的参数作为神经网络的输出,其中,所实施的函数能够在考虑所输出的参数的情况下反映中心迹线。由此使得能够实现在拍摄图像内的精确的本车道走向。
27.根据一种实施方式,本车道的提供包括:
28.将多项式函数的走向或样条函数的走向或羊角螺线函数的走向在拍摄图像中表示为连贯的线元素或连贯的面元素。
29.由此能够实现如下技术优点:使得能够实现在拍摄图像内对本车道的精确的表示。通过在拍摄图像内将多项式函数的、样条函数的或羊角螺线函数的走向表示为连贯的线元素或面元素,能够实现在拍摄图像内在光学上精确地表示预测的本车道。
30.根据一种实施方式,本车道的提供包括:
31.将本车道在拍摄图像中的图像坐标转换为与车辆位置固定地关联的坐标系的三维坐标;和
32.将三维坐标提供给车辆控制装置。
33.由此能够实现如下技术优点:除了或替代于在拍摄图像内对本车道进行视觉表示,附加地将所求取到的本车道用于控制车辆。为此将拍摄图像内的本车道图像坐标转换为与待控制的车辆位置固定地连接的坐标系的三维坐标,并将相应经转换的三维坐标提供给车辆控制装置。在此基础上,该车辆控制装置能够根据所求取到的本车道的三维坐标生成相应的控制命令,这些控制命令根据所生成的三维的本车道坐标操控车辆。
34.根据一种实施方式,为求取中心迹线,还考虑关于包括该车道的行驶廊道的信息,其中,以拍摄图像的像点的形式和/或以公制度量的形式考虑该信息。
35.由此能够实现如下技术优点:进一步精确化对中心迹线的求取,而与此相关地使得能够实现进一步精确化对本车道的求取。除了在拍摄图像中所表示的可被车辆驶过的车道外,还附加地考虑包括该车道的行驶廊道的信息用于求取中心迹线并基于此求取本车
道。这使得能够实现特别是在车道不能被明确识别的情况下精确地求取中心迹线并且基于此也使得能够实现精确地求取本车道。
36.根据一种实施方式,为求取中心迹线,还考虑关于中心迹线的像点之间在公制度量下的距离的信息。
37.由此能够实现如下技术优点:能够进一步提高确定本车道的求取精度。为此考虑在拍摄图像内的中心迹线像点之间在公制度量下的距离用于计算本车道。通过考虑在拍摄图像内的中心迹线像点之间的距离,可以除了这些拍摄图像内像点的坐标信息外附加地使用距离信息来设置相应生成的本车道。由此能够将以这种方式所生成的本车道精确地转化到真实的车辆环境中,从而能够基于该本车道的信息改善对车辆的操控。
38.根据一种实施方式,为求取中心迹线,还考虑车辆里程测量的信息和/或反映该车道的道路地图的地图信息。
39.由此能够实现如下技术优点:能够进一步改善求取中心迹线的求取精度并与此相关地实现对本车道的求取。通过考虑反映该车道的道路地图的地图信息,能够改善特别是在车道在图像中较差地被识别的情况下对中心迹线的求取。对车辆测距的信息的考虑使得能够实现特别是对关于车速或横向控制的信息的考虑,可以分别在求取本车道时对这些信息加以考虑。
40.根据一种实施方式,摄像机传感器的拍摄图像反映除了可被该被车辆驶过的车道之外还反映至少一个另外的车道,其中,为所述至少一个另外的车道求取另外的中心迹线,并且其中,本车道包括该车道的中心迹线和所述另外的车道的另外的中心迹线。
41.由此能够实现如下技术优点:能够考虑多个车道用于预测本车道。本车道在此可以作为所述多个中心迹线的组合来生成。由此特别是在预测本车道的情况下能够考虑离开当前被该被车辆驶过的车道驶到相邻布置的车道上的超车过程。
42.根据第二方面,提供一种计算单元,该计算单元设置为用于实施根据前述实施方式中任一种实施方式的用于为车辆预测本车道的方法。
43.根据第三方面,提供一种计算机程序产品,该方法包括指令,所述指令在通过数据处理单元执行该程序时促使该数据处理单元实施根据前述实施方式中任一种实施方式的用于为车辆预测本车道的方法。
附图说明
44.参照以下附图阐述本发明的实施例。在这些附图中示出:
45.图1:驶过一个车道的车辆的示意图;
46.图2:可被车辆驶过的车道的拍摄图像的示意图;
47.图3:可被车辆驶过的车道的拍摄图像的另一示意图;
48.图4:根据一种实施方式的用于实施用于为车辆预测本车道的方法的神经网络的示意图;
49.图5:根据一种实施方式的用于为车辆预测本车道的方法的流程图;和
50.图6:一种计算机程序产品的示意图。
具体实施方式
51.图1示出驶过车道205的车辆200的示意图。
52.在所示出的实施方式中,所示出的车辆200包括摄像机传感器201用于拍摄被该车辆驶过的车道205的图像。该车辆还包括计算单元202,该计算单元设置为用于实施根据本发明的用于预测车辆200的本车道的方法。
53.在所示出的图示中,车辆200驶过行驶道路203的车道205。行驶道路203还具有与车道205相邻布置的车道207以及行驶道路边界209和行驶道路标记211。在图1中还为每个车道205、207示出相应中心迹线213、214。中心迹线213、214被表示为限定各个车道213、214的中心的线元素或面元素。在此,中心迹线213、214沿对应的车道205、207的纵向延伸。车道205、207的中心分别在对应的车道205、207的两个外边界之间延伸,这些边界在所示出的实施方式中分别通过行驶道路边界209或行驶道路标记211给出。
54.摄像机传感器201可以构造为视频摄像机,特别是rgb摄像机。
55.在所示出的实施方式中,车辆200特别是包括可在计算单元202上实施的车辆控制装置206,借助该车辆控制装置能够操控该车辆。
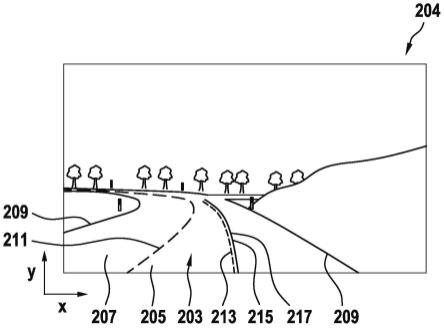
56.图2示出可被该车辆200驶过的车道205的拍摄图像204的示意图。
57.图2示出通过摄像机传感器201拍摄的可被该车辆200驶过的车道205的拍摄图像204。类似于图1,在所示出的拍摄图像204中,可被该车辆200驶过的行驶道路除了行驶道路203之外还包括另一车道207,所示出的行驶道路203还具有行驶道路边界209和行驶道路标记211。在拍摄所述拍摄图像204的时间点,可被车辆200驶过的车道205实际上在被车辆200驶过,并且拍摄图像204可以在车辆200的行驶期间拍摄。然而,拍摄图像204也可以在车辆200未驶过车道205的时间点期间拍摄,车辆200在该时间点例如因为车辆200才刚刚转弯到车道205上或者因为车辆200在拍摄图像204的时间点停顿并且没有活跃地行驶而未驶过车道205。
58.所示出的拍摄图像204示出从驾驶员视角出发的行驶道路203。因此,所示出的拍摄图像204能够类似于在图1中所示出的实施方式的那样通过构造在车辆200的车辆前部的摄像机传感器201拍摄。在所示出的视角中,车道205被对应的车辆200驶过。在所示出的拍摄图像204中还示出被车辆200驶过的车道205的中心迹线213。
59.沿着车道205的中心迹线213的走向,在图2中还以实线元素的形式表示本车道215。在所示出的实施方式中,本车道215相当于车道205的中心迹线213。所示出的本车道217是按照根据本发明的方法通过对车辆本车道的预测来生成的。
60.根据本发明,在拍摄图像204上实施经训练的神经网络用于预测本车道215。在此,借助回归训练神经网络用于基于车道的拍摄图像将延伸通过所反映的车道的中心的中心迹线和至少一个表征所求取到的中心迹线213的参数作为输出值输出。因此,根据本发明,通过实施相应经训练的神经网络所进行的对中心迹线213的求取不是通过基于对拍摄图像204进行分类的对象识别来进行的,而是借助回归方法通过借助回归来训练的神经网络来进行的。
61.通过在拍摄图像204上实施借助回归所训练的神经网络,该神经网络设置为用于输出表征车道205的中心迹线213的多个参数。所输出的参数例如可以通过多个x坐标和y坐标给出,拍摄图像204内的、根据通过经训练的神经网络所进行的确定在拍摄图像204内反
映中心迹线213的各个像点通过这些坐标来限定。
62.替代于此,通过神经网络作为输出值所输出的参数可以包括多项式函数的或样条函数的或羊角螺线函数的函数参数。多项式函数或样条函数或羊角螺线函数在此设置为用于针对对应的参数值,在拍摄图像204内表示车道205的通过经训练的神经网络所求取到的中心迹线213。通过根据由神经网络所求取到的函数参数来实施所提及的这些函数,所提及的函数的函数走向表示拍摄图像204内的中心迹线213。
63.在将拍摄图像204中的反映中心迹线213的像点的x坐标或y坐标输出后,可以通过由合适的n阶多项式函数或通过自己的样条函数来连接像点而生成或仿拟通过神经网络所识别出的中心迹线213。因此,通过实施连接由神经网络输出的像点的函数,能够通过所实施像点的函数各自的函数走向实现对关于在拍摄图像204中所示出的车道205而言的中心迹线213的描述。
64.对此替代地可以通过根据由神经网络所求取到的函数参数来实施上文中所提及的多项式函数、样条函数或羊角螺线函数来实现中心迹线213。
65.为预测车辆200的本车道215,随后将以这种方式所求取到的中心迹线213或者说表示中心迹线213的多项式函数的、样条函数的或羊角螺线函数的走向辨识为本车道。
66.随后可以提供以这种方式所求取到的本车道215,其方式是,例如将本车道215显示为拍摄图像204内的连贯的线元素或连贯的面元素。因此参见图2中的示意图,拍摄图像204连同被表示为线元素或面元素的本车道215可以作为预测的本车道215被显示给车辆200的驾驶员。
67.对此附加或替代地,可以将表示拍摄图像204内的中心迹线213或本车道215的像点的x坐标或y坐标转化为与车辆200位置固定地连接的坐标系的相应的三维坐标。还可以将以这种方式所转换的三维坐标作为预测的本车道215提供给车辆控制装置206。基于本车道215的三维坐标,车辆控制装置206可以实现操控车辆使该车辆沿着该本车道运动。
68.在所示出的拍摄图像204中,本车道215以相应的多项式函数的、样条函数的或羊角螺线函数的走向217的形式被表示。所提及的这些函数的走向217再次被表示为拍摄图像204内的连贯的线元素。
69.为求取中心迹线213,除了考虑拍摄图像204的信息外,还可以考虑关于在拍摄图像204中表示中心迹线213的像点之间在公制度量下的距离的信息。通过考虑中心迹线213的像点之间的距离,能够因此将距离信息引入到对本车道215的预测中。
70.附加或替代地可以在对中心迹线213进行求取时考虑关于包括车道205的行驶廊道的信息。该行驶廊道例如可以是拍摄图像204内的包括车道205的空间区域。
71.替代或附加地,为了求取中心迹线213,可以考虑反映车道205的道路地图的地图信息和/或关于车辆里程测量的信息中心迹线。通过考虑地图信息能够特别是在车道205未被清晰地表示的情况下精确地求取中心迹线213。通过考虑车辆里程测量的信息能够将关于车辆200的速度或横向控制的信息引入到对本车道215的预测中。
72.图3示出可被车辆200驶过的车道205的拍摄图像204的另一示意图。
73.在所示出的实施方式中,为了求取本车道215,除了考虑可被车辆200驶过的车道205的中心迹线213外,还考虑也可被车辆200驶过的另一车道207的另一中心迹线214。如图2中的那样,拍摄图像204可以是在车辆200行驶期间拍摄的,使得车道205被车辆200驶过。
拍摄图像也可以在车辆200不驶过车道205的时间点被拍摄,例如因为车辆200才刚刚转弯到车道205上或者因为车辆200在拍摄图像204的时间点是静止的。在所示出的拍摄图像204中,再次示出从驶过该行驶道路的车辆200的驾驶员视角出发的行驶道路203。该行驶道路具有两个相邻布置的车道205、207,这些车道通过行驶道路标记211相互分开。车行道还具有行驶道路边界209。在所示出的拍摄图像204中,在原本被该车辆驶过的车道205上示出另一车辆219。因此,车辆200为实施超车过程必须从原本驶过的车道205变换到相邻布置的车道207上。因此,相应的本车道215必须不仅包括原本驶过的车道205而且包括车辆200在超车过程中必须变道上去的另外的车道207。
74.因此根据本发明,通过在拍摄图像204上实施相应借助回归所训练的神经网络来为车道205求取中心迹线213,并为另外的车道207求取另外的中心迹线214,这些中心迹线中分别延伸通过车道205、207的中心并沿车道205、207的纵向方向延伸。通过相应地求取中心迹线213、214的参数,例如在拍摄图像204中描述中心迹线213、214的像点的x坐标或y坐标或描述中心迹线213、214的多项式函数、样条函数或羊角螺线函数的函数参数,并且通过基于相应求取到的参数实施相应的多项式函数、样条函数或羊角螺线函数,可以生成所提及的这些函数的走向217,该走向不仅考虑车道205的中心迹线213而且考虑另外的车道207的中心迹线214。根据上述实施方式将本车道215以函数的以这种方式生成的走向217来表示,该函数考虑由神经网络所求取到的代表中心迹线213、214的参数。在所示出的实施方式中,以这种方式所求取到的中心迹线215不仅被表示为描述所提及的函数的走向217的连贯的线元素,而且被表示为呈阴影形式的连贯的面元素,该面元素包括车辆200根据超车过程待驶过的车道205、207。
75.图4示出根据一种实施方式的用于实施用于预测车辆200的本车道215的方法100的神经网络300的示意图。
76.神经网络300特别地可以是卷积神经网络cnn。
77.神经网络300替代地可以是递归神经网络。
78.为此,根据本发明的神经网络300包括输入层301。根据本发明,车辆200的摄像机传感器201的拍摄图像204用作神经网络300的输入数据。神经网络300还包括用于实施拍摄图像204的卷积过程的卷积层303。该神经网络300还包括用于对卷积层303的输出数据实施池化过程的池化层302。该神经网络300还包括用于对池化层302的输出数据实施另一卷积过程的另一卷积层305。该神经网络300还包括用于对另一卷积层305的输出数据实施另一池化过程的另一池化层304。
79.神经网络300还包括两个独立的输出路径306a、306b。每个输出路径306a,306b分别包括一个用于对池化层304的输出数据实施另外的卷积过程的另外的卷积层307a,307b。每个输出路径306a,306b还具有一个用于对卷积层307a,307b的输出数据实施池化过程的另外的池化层308a,308b。所述池化层308a、308b尤其可以是全局平均池化层(global-average-pooling-schichten)。每个输出路径306a、306b还包括一个用于输出代表中心迹线213的参数的输出层309a、309b。这些参数在此例如可以形成为在拍摄图像204中描述中心迹线213的像点的x坐标或y坐标。因此,神经网络300可以通过输出层309a输出例如对应像点的x坐标而通过输出层309b输出对应像点的y坐标。
80.替代于在此所显示的卷积层数量和池化层数量,神经网络300可以可变地构型。此
外还能够实现大量的彼此独立的输出路径。
81.图5示出根据一种实施方式的用于预测车辆200的本车道215的方法100的流程图。
82.为预测车辆200的本车道213,在第一方法步骤101中首先接收车辆200的摄像机传感器201的拍摄图像204,该拍摄图像204代表被车辆200驶过的至少一个车道205。拍摄图像204在此例如可以通过视频摄像机的视频拍摄的单帧形成。替代于此,拍摄图像可以包括视频拍摄的多个在时间上彼此相继的帧。
83.在另一方法步骤103中,基于拍摄图像204求取可被车辆200驶过的或正被车辆200驶过的车道205的中心迹线213。为此,对拍摄图像204实施相应经训练的神经网络300,其中,该神经网络300借助回归被训练用于基于各个车道205、207的拍摄图像来求取延伸通过各个车道205、207中心的相应中心迹线213、214。
84.在另一方法步骤105中,代表中心迹线213的多个参数被神经网络输出作为神经网络300的输出数据。
85.为此,在所示出的实施方式中,多个x坐标和多个y坐标被神经网络300在方法步骤113中作为参数输出。x坐标和y坐标在此描述拍摄图像204内的像点,这些像点根据对神经网络300的求取反映车道205的中心迹线213。
86.在另一方法步骤107中,根据神经网络300输出的参数生成或反映中心迹线213。
87.为此,在方法步骤115中,拍摄图像204的、通过神经网络300所输出的反映中心迹线213的像点的x坐标或y坐标可以通过实施n阶多项式函数或样条函数而彼此连接。在此例如可以根据对反映中心迹线213的像点的x坐标和y坐标的拟合过程(anpassungs-bzw.fitprozesses)来实施n阶多项式函数或样条函数。
88.替代或附加地,神经网络300可以输出中心迹线多项式函数和/或样条函数和/或羊角螺线函数的代表中心迹线213的参数,所述函数设置为用于代表中心迹线213。因此,在另一方法步骤119中,为了生成中心迹线213,能够根据通过神经网络300所求取到的参数来实施所提及的函数中心迹线。因此,中心迹线213可以由所提及的函数各自的走向217表示。
89.在另一方法步骤109中,中心迹线213被辨识为本车道215。
90.为此,在方法步骤117中,特别是将分别所实施的多项式函数、样条函数或羊角螺线函数的走向辨识为本车道215。
91.在另一方法步骤111中,提供本车道215。
92.为此,在方法步骤121中,可以在拍摄图像204中将分别所实施的函数的表示中心迹线213并被辨识为本车道215的走向217图形式地表示为连贯的线元素或连贯的面元素。
93.替代或附加地,将表示中心迹线213的像点的所求取到的x坐标和y坐标转换为与车辆200位置固定地连接的坐标系的三维坐标。
94.在方法步骤125中,可以将以这种方式所转换的、在位置固定的三维坐标系内描述所预测的本车道215的三维坐标用于按照所预测的本车道215来控制车辆200。因此,这些三维坐标可被提供给该车辆的相应的车辆控制装置206。
95.图6示出一种计算机程序产品400的示意图,该计算机程序产品包括指令,所述指令在通过计算单元执行该程序时促使该计算单元实施用于预测车辆200的本车道215的方法100。
96.在所示出的实施方式中,该计算机程序产品400被存储在存储介质401上。该存储
介质401可以是从现有技术中已知的任何存储介质。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。