技术特征:
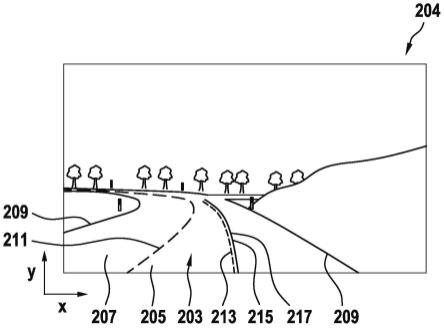
1.一种用于为车辆(200)预测本车道的方法(100),所述方法包括:-接收(101)所述车辆(200)的至少一个摄像机传感器(201)的反映可被所述车辆(200)驶过的车道(205)的至少一个拍摄图像;-通过对所述拍摄图像(204)实施经训练的神经网络(300)来求取(103)延伸通过所述车道(205)的中心的中心迹线(213),其中,所述神经网络(300)借助回归被训练用于基于车道(205)的拍摄图像(204)来求取该车道(205)的在该车道(205)的中心延伸的中心迹线(213);-通过所述神经网络(300)输出(105)多个描述所述车道(205)的所述中心迹线(213)的参数;-基于所述中心迹线(213)的所述参数生成(107)所述中心迹线(213);-将所述车道(205)的所述中心迹线(213)辨识(109)为所述车辆(200)的本车道(215);和-提供(111)所述本车道(215)。2.根据权利要求1所述的方法(100),其中,所述中心迹线(213)的所述多个参数包括所述拍摄图像(204)的多个像点,其中,所述多个像点代表在所述拍摄图像(204)中的所述中心迹线(213),并且其中,对所述多个参数的所述输出(105)包括:-通过所述神经网络(300)输出(113)多个x坐标和多个y坐标,其中,这些x坐标和y坐标定义在所述拍摄图像(204)中的所述中心迹线(213)的所述多个像点。3.根据权利要求2所述的方法(100),其中,所述中心迹线(213)的生成(107)包括:-通过n阶多项式函数连接(115)所述拍摄图像(204)的由所述多个x坐标和y坐标所代表的像点;和其中,将所述中心迹线(213)辨识(109)为本车道(215)包括:-将所述多项式函数的走向(217)辨识(117)为本车道(215)。4.根据前述权利要求中任一项所述的方法(100),其中,所述多个参数包括多项式函数或样条函数或羊角螺线函数的多个参数,其中,所述多项式函数、所述样条函数和所述羊角螺线函数设置为用于表示所述中心迹线(213),并且其中,所述中心迹线(213)的生成(107)包括:-以所求取到的参数实施(119)所述多项式函数或所述样条函数或所述羊角螺线函数,并生成所述多项式函数或所述样条函数或所述羊角螺线函数的走向(217)。5.根据权利要求3或4所述的方法(100),其中,所述本车道(215)的提供(111)包括:-将所述多项式函数的走向(217)或所述样条函数的走向或所述羊角螺线函数的走向在所述拍摄图像(204)中表示(121)为连贯的线元素或连贯的面元素。6.根据权利要求3、4或5所述的方法(100),其中,所述本车道(215)的提供(111)包括:-将所述本车道(215)在所述拍摄图像(204)中的图像坐标转换(123)为与所述车辆(200)位置固定地关联的坐标系的三维坐标;和-将所述三维坐标提供(125)给车辆控制装置(206)。7.根据前述权利要求中任一项所述的方法(100),其中,为求取(103)所述中心迹线(213),还考虑关于包括所述车道(205)的行驶廊道的信息,并且其中,以拍摄图像(204)的像点的形式和/或以公制度量的形式考虑该信息。8.根据前述权利要求2至7中任一项所述的方法(100),其中,为求取(103)所述中心迹
线(213),还考虑关于所述中心迹线(213)的像点之间在公制度量下的距离的信息。9.根据前述权利要求中任一项所述的方法(100),其中,为求取(103)所述中心迹线(213),还考虑车辆里程测量的信息和/或反映所述车道(205)的道路地图的地图信息。10.根据前述权利要求中任一项所述的方法(100),其中,所述摄像机传感器(201)的所述拍摄图像(204)除了反映可被所述车辆(200)驶过的所述车道(205)之外还反映至少一个另外的车道(207),其中,为所述至少一个另外的车道(207)求取另外的中心迹线(214),并且其中,所述本车道(215)包括所述车道(205)的中心迹线(213)和所述另外的车道(207)的另外的中心迹线(214)。11.一种计算单元(202),所述计算单元设置为用于实施根据前述权利要求1至10中任一项所述的用于为车辆(200)预测本车道(215)的方法(100)。12.一种计算机程序产品(400),所述计算机程序产品包括指令,所述指令在通过数据处理单元执行所述程序时促使所述数据处理单元实施根据权利要求1至10中任一项所述的用于为车辆(200)预测本车道(215)的方法(100)。
技术总结
本发明涉及一种用于为车辆(200)预测本车道的方法(100),该方法包括:接收(101)该车辆的至少一个摄像机传感器(201)的反映可被该车辆驶过的车道(205)的至少一个拍摄图像;通过对所述拍摄图像(204)实施经训练的神经网络(300)来求取(103)延伸通过该车道中心的中心迹线(213),该神经网络借助回归被训练用于基于车道拍摄图像(204)来求取该车道的在该车道中心中延伸的中心迹线;通过神经网络输出(105)多个描述该车道中心迹线的参数;基于这些中心迹线参数生成(107)该中心迹线;辨识(109)该车道中心迹线作为该车辆的本车道(215);提供(111)该本车道(215)。提供(111)该本车道(215)。提供(111)该本车道(215)。
技术研发人员:A
受保护的技术使用者:罗伯特
技术研发日:2022.08.12
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。