技术特征:
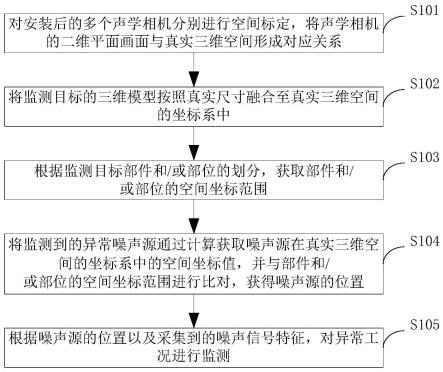
1.一种异常工况监测定位方法,其特征在于,包括如下步骤:a、对安装后的多个声学相机分别进行空间标定,将所述声学相机的二维平面画面与真实三维空间形成对应关系;b、将监测目标的三维模型按照真实尺寸融合至所述真实三维空间的坐标系中;c、根据所述监测目标部件和/或部位的划分,获取所述部件和/或部位的空间坐标范围;d、将监测到的异常噪声源通过计算获取所述噪声源在所述真实三维空间的坐标系中的空间坐标值,并与所述部件和/或部位的空间坐标范围进行比对,获得所述噪声源的位置;e、根据所述噪声源的位置以及采集到的噪声信号特征,对异常工况进行监测。2.根据权利要求1所述的异常工况监测定位方法,其特征在于,所述声学相机包括第一声学相机和第二声学相机,两者相对于所述监测目标为非对侧设置。3.根据权利要求2所述的异常工况监测定位方法,其特征在于,将所述声学相机进行空间标定采用如下具体步骤:在所述二维平面画面中记录所述声学相机位置为点a;在所述真实三维空间中选择一个点b0,使其位于所述二维平面画面的正中央位置,则所述声学相机的指示方向为由所述点a至所述点b0的方向向量在所述真实三维空间中另外选择一个点b1,使其在所述二维平面画面中可见;在所述真实三维空间中的坐标系中测量所述点a、b0、b1的坐标分别为a(x0,y0,z0)、b0(x
b0
,y
b0
,z
b0
)、b1(x
b1
,y
b1
,z
b1
);设点b`1坐标为(x
b1
,y
b1
,z
b0
),计算方向向量与所述方向向量的夹角β1;同时计算方向向量与x坐标轴的夹角θ1;通过所述声学相机的所述二维平面画面,获取所述点b1与点b0在画面中的映射点b
11
与点b
01
,测量方向向量与水平线的夹角α1;在所述二维平面画面中以所述映射点b
01
为原点,建立平面坐标系x
1 b
01
y1,设所述投影在x1轴的长度为l1,投影在y1轴的长度为l2,计算映射系数记录所述映射系数完成所述声学相机的空间标定。4.根据权利要求3所述的异常工况监测定位方法,其特征在于,所述步骤d中的将监测到的异常噪声源通过计算获取噪声源在真实三维空间的坐标系中的空间坐标值具体包括如下步骤:d1、当所述异常噪声源在所述二维平面画面中出现时,将该噪声源的中心点在所述平面坐标系x
1 b
01 y1中表示为m1(x
1m1
,y
1m1
),计算点m1距离坐标系x1轴与y1轴的距离l
1m1
与l
2m1
;d2、计算cosβ
m1
=φ1·
l
1m1
;cosθ
m1
=φ2·
l
2m1
;
d3、通过的方向向量,获取所述第一声学相机的点线式直线方程如下:d4、重复所述步骤d1至步骤d3,获取所述第二声学相机的点线式直线方程如下:d5、计算所述方程(1)和方程(2)的交点,所述交点的坐标值即为所述异常噪声源的所述真实三维空间的坐标值。5.根据权利要求1所述的异常工况监测定位方法,其特征在于,所述步骤e具体为:将所述噪声源的位置以及采集到的噪声信号特征与故障数据库中的异常工况数据进行比对,判断可能发生的故障类型及程度并发出预警信息。6.根据权利要求1所述的异常工况监测定位方法,其特征在于,在所述空间标定之前,对所述声学相机的二维平面画面进行桶形畸变和枕形畸变的消除处理。7.一种异常工况监测定位系统,其特征在于,包括:空间标定单元,用于对安装后的多个声学相机分别进行空间标定,将所述声学相机的二维平面画面与真实三维空间形成对应关系;目标融合单元,用于将监测目标的三维模型按照真实尺寸融合至所述真实三维空间的坐标系中;目标划分单元,用于根据所述监测目标部件和/或部位的划分,获取所述部件和/或部位的空间坐标范围;噪声位置获取单元,用于将监测到的异常噪声源通过计算获取所述噪声源在所述真实三维空间的坐标系中的空间坐标值,并与所述部件和/或部位的空间坐标范围进行比对,获得所述噪声源的位置;异常工况监测单元,用于根据所述噪声源的位置以及采集到的噪声信号特征,对异常工况进行监测。8.根据权利要求7所述的异常工况监测定位系统,其特征在于,所述异常工况监测单元具体包括:数据比对子单元,用于将所述噪声源的位置以及采集到的噪声信号特征与故障数据库中的异常工况数据进行比对;故障判断子单元,用于判断可能发生的故障类型及程度并发出预警信息。9.根据权利要求7所述的异常工况监测定位系统,其特征在于,还包括画面预处理单元,用于在所述空间标定之前,对所述声学相机的二维平面画面进行桶形畸变和枕形畸变的消除处理。10.一种电子设备,其特征在于,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器执行如权利要求1~6中任意一项所述的方法。
11.一种非暂态计算机可读存储介质,其特征在于,所述非暂态计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使所述计算机执行如权利要求1~6中任意一项所述的方法。
技术总结
本发明公开了一种异常工况监测定位方法及系统,该方法包括如下步骤:A、对安装后的多个声学相机分别进行空间标定,将声学相机的二维平面画面与真实三维空间形成对应关系;B、将监测目标的三维模型按照真实尺寸融合至真实三维空间的坐标系中;C、根据监测目标部件和/或部位的划分,获取部件和/或部位的空间坐标范围;D、将监测到的异常噪声源通过计算获取噪声源在所述真实三维空间的坐标系中的空间坐标值,并与部件和/或部位的空间坐标范围进行比对,获得噪声源的位置;E、根据噪声源的位置以及采集到的噪声信号特征,对异常工况进行监测。测。测。
技术研发人员:李明骏 邱枫 王国龙 肖安山 朱胜杰 丁德武
受保护的技术使用者:中国石油化工股份有限公司青岛安全工程研究院
技术研发日:2021.08.06
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。