1.本发明涉及无线通信领域,尤其涉及一种波达方向的估计方法。
背景技术:
2.波达方向(direction of arrival,简称“doa”)在无线通信、导航、雷达等领域都有着广泛的应用。目前常用的波达方向估计方法有古典谱估计算法、经典多信号分类(multiple signal classification,简称“music”)算法、经典基于旋转不变技术的信号参数估计(estimating signal parameter via rotational invariance techniques,简称“esprit”)算法、角度-空间谱算法及其对应的一些改进优化算法。以下会具体介绍上述部分算法:
3.1.古典谱估计法,它是通过计算空间谱求取其局部最大值,从而估计出信号的波达方向,有一定的搜索量,计算复杂度高。
4.2.经典music算法,它利用了信号子空间和噪声子空间的正交性,构造空间谱函数,通过谱峰搜索,检测信号的doa,计算量大,复杂度高。
5.3.经典esprit算法,利用了自相关矩阵信号子空间的旋转不变特性估计doa,避免了大多数doa估计算法的搜索过程,大大降低了计算量,但需要对协方差矩阵进行特征值分解,计算相应的特征向量,当特征向量不唯一时,还需要进行特征向量的判断,计算量仍旧较大。
6.通过上述介绍可知,当前常用的波达方向估计方法存在计算量大、计算复杂度高的问题。
技术实现要素:
7.本发明的目的在于解决上述问题,提供一种波达方向估计方法、装置、电子设备及存储介质,在不降低性能的前提下,避免了波达方向估计算法的搜索过程,大大降低了计算量。
8.为解决上述问题,本发明的实施例提供了一种波达方向估计方法,包括:获取接收信号的导向矢量;对所述导向矢量进行延迟自相关,获取所述导向矢量的平均相关值;获取所述平均相关值的相位;基于所述平均相关值的相位估计所述接收信号的波达方向。
9.为解决上述问题,本发明的实施例还提供一种波达方向估计装置,包括:导向矢量获取模块,用于获取接收信号的导向矢量;自相关模块,用于对所述导向矢量进行延迟自相关,获取所述导向矢量的平均相关值;相位获取模块,用于获取所述平均相关值的相位;波达方向估计模块,用于基于所述平均相关值的相位估计所述接收信号的波达方向。
10.为解决上述问题,本发明的实施例还提供了一种电子设备,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的波达方向估计方法。
11.为解决上述问题,本发明的实施例还提供了一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现上述的波达方向估计方法。
12.相较于当前常用的波达方向估计方法而言,本技术的实施例提出的波达方向估计方法,在不降低性能的前提下,利用延迟自相关,及多个延迟自相关值求平均,有利于减少噪声的影响,提高估计准确度;通过垂直向相关值的相位来估计垂直向角度,水平向相关值的相位来估计水平向角度,避免了波达方向估计算法的搜索过程,大大降低了实现估计波达方向的复杂度。
附图说明
13.图1是本发明一实施例提供的波达方向估计方法的流程图一;
14.图2是本发明一实施例提供的波达方向估计方法的流程图二;
15.图3是本发明一实施例提供的波达方向估计方法的流程图三;
16.图4是本发明一实施例提供的波达方向估计装置的结构示意图;
17.图5是本发明一实施例提供的电子设备结构示意图。
具体实施方式
18.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本发明各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术所要求保护的技术方案。
19.本发明提供了一种波达方向估计方法,在无线通信、定位、导航、雷达等领域皆可应用,尤其适合用于5g nr(new radio,新无线)系统中的大规模天线时的波达方向估计。
20.在无线通信领域,尤其在5g nr系统中,在mu-mimo(multiple user multiple input multiple output,多用户多入多出)传输中,可以通过doa获知用户的方位信息,有利于用户配对,用户调度,从而可以提高配对增益,整体提高mu-mimo的传输性能。在su-mimo(single user multiple input multiple output,单用户多入多出)传输中,可以通过doa获知用户的方位信息,有利于选择最佳的波束。
21.在无线通信领域的定位系统、mu-mimo系统、su-mimo中会涉及到用户方向,受限于计算复杂度时,尤其适用本发明实施方式的估计方法。
22.本发明的一实施例涉及一种波达方向估计方法。在本实施例中,首先获取接收信号的导向矢量;对所述导向矢量进行延迟自相关,获取所述导向矢量的平均相关值;获取所述平均相关值的相位;基于所述平均相关值的相位获取所述接收信号的波达方向,本技术提高了估计波达方向的准确度,大大降低了计算量。
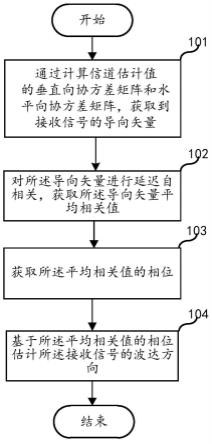
23.下面对本实施例中的波达方向估计方法的实现细节进行具体的说明,以下内容仅为方便理解本方案的实现细节,并非实施本方案的必须。具体流程如图1所示,可包括如下步骤:
24.步骤101:通过计算信道估计值的垂直向协方差矩阵和水平向协方差矩阵,获取到接收信号的导向矢量。
25.根据信道估计值及天线阵列模式,分别获取信道估计值的垂直向协方差矩阵和水
平向协方差矩阵,并在阵列维度、极化维度、天线端口维度、资源块或资源粒子维度求平均得到垂直向协方差矩阵rv(n,n)和水平向协方差矩阵rh(m,m);其中,n表示垂直向阵子索引,m表示水平向阵子索引。
26.在本实施例中,利用协方差矩阵可以消除一些固有的相位移位,在极化维度、端口维度、re或rb维度求平均,有利于减少噪声的影响,提高估计准确度。
27.步骤102:对所述导向矢量进行延迟自相关,获取所述导向矢量的平均相关值。
28.具体地说,对垂直向导向矢量的每一列进行延迟距离为预设值的延迟自相关,并将所有的相关值加和求平均;对水平向导向矢量的每一列进行延迟距离为预设值的延迟自相关,并将所有的相关值加和求平均,其中,该预设值可以是大于等于1的任意数值。
29.在一个例子中,可将延迟距离设置为1,通过将延迟距离设置为1以使后续计算波达方向的过程变得更加简洁。
30.在本实施例中,利用延迟自相关,及多个延迟自相关值求平均,有利于减少噪声的影响,提高估计准确度。
31.步骤103:获取所述平均相关值的相位。
32.具体地说,根据所述垂直向的平均相关值,获取垂直向相关值的相位θv;根据所述水平向的平均相关值,获取水平向相关值的相位
33.假设垂直向相关值corrv=a bj,水平向相关值corrh=c dj,则垂直向相关值的相位和水平向相关值的相位通过如下公式得到:
[0034][0035][0036]
步骤104:基于所述平均相关值的相位估计所述接收信号的波达方向。
[0037]
具体地说,通过以下公式,根据垂直向相关值的相位估计波达方向的垂直向角度,
根据水平向相关值的相位估计波达方向的水平向角度。
[0038][0039][0040]
其中,θ表示俯仰角即垂直向角度,表示方位角即水平向角度,dv为垂直向阵子间距与波长的比值,dh为水平向阵子间距与波长的比值,d为延迟相关距离。
[0041]
在本实施例中,通过垂直向相关值的相位来估计垂直向角度,水平向相关值的相位来估计水平向角度,大大降低了实现复杂度。
[0042]
在一个例子中,以nr上行srs(sounding reference signal,信道探测参考信号)为例。假设nr上行srs占用32个rb(resource block,资源块),2rb绑定,用户端4端口,接收基站天线数为64,正负45度极化,垂直向阵子数n=4,水平向阵子数m=8。los(line of sight,视距)信道,即cdle(clustered delay line e,集群延迟线e)信道模型。多用户位置位于(x=100,y=[-100100],z=0)范围内随机分布。
[0043]
经过步骤101,获取到的垂直向协方差矩阵rv为4*4的矩阵,水平向协方差矩阵rh为8*8的矩阵。
[0044]
在步骤102中,以延迟距离d=1为例,计算垂直向导向矢量和水平向导向矢量的相关值的公式如下:
[0045][0046][0047]
其中,水平向阵子数m=8,垂直向阵子数n=4。
[0048]
根据上述步骤102求出垂直向的相关值和水平向的相关值,在步骤103中求出垂直向相关值的相位θv和水平向相关值的相位。并根据步骤104的公式求出波达方向的垂直向角度和水平向角度。
[0049]
在本例子中的数据是仿真数据,用户真实位置是设置值,通过仿真结果得到利用基于延迟自相关方法估计的波达方向和真实的波达方向差值的方差为0.01~0.07,说明结果性能较好。
[0050]
在本实施例中,利用协方差矩阵可以消除一些固有的相位移位,在极化维度、端口维度、re或rb维度求平均,有利于减少噪声的影响,提高估计准确度;利用延迟自相关,及多个延迟自相关值求平均,也有利于减少噪声的影响,提高估计准确度;通过垂直向相关值的相位来估计垂直向角度,水平向相关值的相位来估计水平向角度,大大降低了实现复杂度。本实施例在不降低性能的前提下,大大解决了目前常用波达估计方法中计算量大,计算复杂度高的问题,同时还减少了噪声的影响,提高了估计准确度。
[0051]
本发明另一实施例涉及一种波达方向估计方法,具体流程如图2所示。可包括如下步骤:
[0052]
在步骤201中,通过计算信道估计值的垂直向分量和水平向分量,获取到接收信号
的导向矢量。
[0053]
具体地说,根据信道估计值及天线阵列模式,分别计算信道估计值的垂直向分量hv(n,m,p,port,r)和水平向分量hh(m,n,p,port,r),其中,n表示垂直向阵子索引,m表示水平向阵子索引,p表示极化索引,port表示端口索引,r表示re或rb索引。
[0054]
在步骤202中:对所述导向矢量进行延迟自相关,获取所述导向矢量的平均相关值。
[0055]
具体地说,对垂直向导向矢量的每一列进行延迟距离为预设值的延迟自相关,并将所有的相关值加和求平均;对水平向导向矢量的每一列进行延迟距离为预设值的延迟自相关,并将所有的相关值加和求平均,,其中,该预设值可以是大于等于1的任意数值。
[0056]
以延迟距离d=1为例,计算垂直向导向矢量和水平向导向矢量的相关值的公式如下:
[0057][0058][0059]
其中,水平向阵子数m=8,垂直向阵子数n=4,nr表示re数或rb数,正负45度极化,p表示极化索引,p=0,1。n
port
表示端口数。
[0060]
在步骤203中:获取所述平均相关值的相位。
[0061]
具体地说,根据所述垂直向的平均相关值,获取垂直向相关值的相位θv;根据所述水平向的平均相关值,获取水平向相关值的相位
[0062]
假设垂直向相关值corrv=a bj,水平向相关值corrh=c dj,则垂直向相关值的相位和水平向相关值的相位通过如下公式得到:
[0063]
[0064][0065]
在步骤204中:基于所述平均相关值的相位估计所述接收信号的波达方向。
[0066]
具体地说,根据垂直向相关值的相位估计波达方向的垂直向角度,根据水平向相关值的相位估计波达方向的水平向角度。
[0067][0068][0069]
其中,θ表示俯仰角即垂直向角度,表示方位角即水平向角度,dv为垂直向阵子间距与波长的比值,dh为水平向阵子间距与波长的比值,d为延迟相关距离。
[0070]
在一个例子中,获取到垂直向分量hv(n,m,p,port,r)和水平向分量hh(m,n,p,port,r)后,分别对水平导向矢量和垂直导向矢量的每一列做延迟自相关,并根据上述垂直向分量hv(n,m,p,port,r)和水平向分量hh(m,n,p,port,r)计算出垂直向的相关值和水平向的相关值,再根据垂直向的相关值计算出垂直向相关值的相位,根据水平向的相关值计算出水平向相关值的相位,最后根据垂直向相关值的相位估计波达方向的垂直向角度,根据水平向相关值的相位估计波达方向水平向的角度。
[0071]
在目前的常用波达方向估计方法中,存在计算量大,计算复杂度高的问题,而在本发明中,利用延迟自相关,及多个延迟自相关求平均值,有利于减少噪声影响,提高波达方向估计的准确度;通过相关值的相位来计算其对应的角度,大大降低了实现复杂度,减少了计算过程和计算量。
[0072]
本发明的另一实施例涉及一种波达方向估计方法,具体流程如图3所示。可包括如下步骤:
[0073]
在步骤301中,通过计算赋形权值的垂直向分量和水平向分量,获取到接收信号的导向矢量。
[0074]
具体地说,根据赋形权值向量及天线阵列模式,分别获取赋形权值向量最大能量方向的垂直向分量vv(n,m,p,r)和水平向分量vh(m,n,p,r),其中,n表示垂直向阵子索引,m表示水平向阵子索引,p表示极化索引,r表示资源粒子re或资源块rb索引。
[0075]
在步骤302中,对所述导向矢量进行延迟自相关,获取所述导向矢量的平均相关值。
[0076]
具体地说,对垂直向导向矢量的每一列进行延迟距离为预设值的延迟自相关,并
将所有的相关值加和求平均;对水平向导向矢量的每一列进行延迟距离为预设值的延迟自相关,并将所有的相关值加和求平均,其中,该预设值可以是大于等于1的任意数值。
[0077]
在步骤303中,获取所述平均相关值的相位。
[0078]
具体地说,根据所述垂直向的平均相关值,获取垂直向相关值的相位θv;根据所述水平向的平均相关值,获取水平向相关值的相位
[0079]
假设垂直向相关值corrv=a bj,水平向相关值corrh=c dj,则垂直向相关值的相位和水平向相关值的相位通过如下公式得到:
[0080][0081][0082]
在步骤304中,基于所述平均相关值的相位获取所述接收信号的波达方向。
[0083]
具体地说,根据垂直向相关值的相位估计波达方向的垂直向角度,根据水平向相关值的相位估计波达方向的水平向角度。
[0084][0085][0086]
其中,θ表示俯仰角即垂直向角度,表示方位角即水平向角度,dv为垂直向阵子间距与波长的比值,dh为水平向阵子间距与波长的比值,d为延迟相关距离。
[0087]
在一个例子中,使用nr系统中实测的外场数据,利用的是根据srs信道响应计算的下行赋形权值向量的第一列向量v。用户端4端口,接收基站天线数为64,正负45度极化,垂直向阵子数n=4,水平向阵子数m=8。用户运动速度20km/h,有los信道和nlos(not line of sight,非视距)信道两种场景数据。
[0088]
其中,天线端口数为4,re数为816,基站侧接收天线数为64,正负45度极化,通过上述步骤301计算出vv为4*8*2*816的矩阵,vh为8*4*2*816的矩阵。
[0089]
在步骤302中,本例子的延迟距离d=1,计算垂直向导向矢量和水平向导向矢量的相关值的公式如下:
[0090][0091][0092]
其中,水平向阵子数m=8,垂直向阵子数n=4,re数nr为816,正负45度极化,p表示极化索引,p=0,1。
[0093]
根据上述步骤302求出的垂直向的相关值和水平向的相关值,在步骤303中求出垂直向相关值的相位θv和水平向相关值的相位。并根据步骤304的公式求出波达方向的垂直向角度和水平向角度。
[0094]
本实施例与现有算法如music算法和古典谱算法相比,估计值一致,但计算量大大降低。
[0095]
上面各种方法的步骤划分,只是为了描述清楚,实现时可以合并为一个步骤或者对某些步骤进行拆分,分解为多个步骤,只要包括相同的逻辑关系,都在本专利的保护范围内;对算法中或者流程中添加无关紧要的修改或者引入无关紧要的设计,但不改变其算法和流程的核心设计都在该专利的保护范围内。
[0096]
本发明的实施例还提供一种波达方向估计装置。如图4所示,包括:导向矢量获取模块401,自相关模块402,相位获取模块403,以及波达方向估计模块404。
[0097]
具体地说,导向矢量获取模块401,用于获取接收信号的导向矢量;自相关模块402,用于对所述导向矢量进行延迟自相关,获取所述导向矢量的平均相关值;相位获取模块403,用于获取所述平均相关值的相位;波达方向估计模块404,用于基于所述平均相关值的相位估计所述接收信号的波达方向。
[0098]
在一个例子中,获取导向矢量的方法包括但不限于,计算信道估计值的垂直向协方差矩阵和水平向协方差矩阵;计算信道估计值的垂直向分量和水平向分量;计算赋形权值的垂直向分量和水平向分量。
[0099]
在一个例子中,自相关模块402对通过上述任一方法获取到的导向矢量的每一列进行延迟自相关,并将所有的相关值加和求平均。其中,通过计算信道响应的垂直向协方差矩阵和水平向协方差矩阵获取到的导向矢量,求所述导向矢量的平均相关值的计算过程与另外两个方法相比更加的简便。
[0100]
在一个例子中,波达方向估计模块404通过以下公式,根据垂直向相关值的相位估计垂直向角度,根据水平向自相关值的相位估计水平向角度。
[0101]
[0102][0103]
其中,θ表示俯仰角即垂直向角度,表示方位角即水平向角度,dv为垂直向阵子间距与波长的比值,dh为水平向阵子间距与波长的比值,d为延迟相关距离。
[0104]
与现有技术相比,本实施例提供的波达方向估计装置避免了在估计波达方向时计算量大,复杂度高的问题。利用协方差矩阵可以消除一些固有的相位移位,在各个维度求平均,有利于减少噪声的影响,提高估计准确度;同时利用延迟自相关,及多个延迟自相关值求平均,也有利于减少噪声的影响,提高估计准确度;通过垂直向相关值的相位来估计垂直向角度,水平向的相关值的相位来估计水平向角度,避免了现有大部分常用波达方向估计方法中需要的搜索过程,大大降低了波达方向估计方法实现的复杂度。
[0105]
不难发现,本实施方式为上述波达方向估计方法实施例相对应的装置实施例,本实施方式可与上述波达方向估计方法实施例互相配合实施。上述波达方向估计方法实施例提到的相关技术细节在本实施方式中依然有效,为了减少重复,这里不再赘述。相应地,本实施方式中提到的相关技术细节也可应用在上述应用于基站的方法实施例中。
[0106]
值得一提的是,本实施方式中所涉及到的各模块均为逻辑模块,在实际应用中,一个逻辑单元可以是一个物理单元,也可以是一个物理单元的一部分,还可以以多个物理单元的组合实现。此外,为了突出本发明的创新部分,本实施方式中并没有将与解决本发明所提出的技术问题关系不太密切的单元引入,但这并不表明本实施方式中不存在其它的单元。
[0107]
本发明的实施例还提供一种电子设备,如图5所示,包括至少一个处理器501;以及,与所述至少一个处理器501通信连接的存储器502;其中,所述存储器502存储有可被所述至少一个处理器501执行的指令,所述指令被所述至少一个处理器501执行,以使所述至少一个处理器能够执行上述实施例中波达方向估计方法。
[0108]
其中,存储器和处理器采用总线方式连接,总线可以包括任意数量的互联的总线和桥,总线将一个或多个处理器和存储器的各种电路连接在一起。总线还可以将诸如外围设备、稳压器和功率管理电路等之类的各种其他电路连接在一起,这些都是本领域所公知的,因此,本文不再对其进行进一步描述。总线接口在总线和收发机之间提供接口。收发机可以是一个元件,也可以是多个元件,比如多个接收器和发送器,提供用于在传输介质上与各种其他装置通信的单元。经处理器处理的数据通过天线在无线介质上进行传输,进一步,天线还接收数据并将数据传送给处理器。
[0109]
处理器负责管理总线和通常的处理,还可以提供各种功能,包括定时,外围接口,电压调节、电源管理以及其他控制功能。而存储器可以被用于存储处理器在执行操作时所使用的数据。
[0110]
上述产品可执行本技术实施例所提供的方法,具备执行方法相应的功能模块和有益效果,未在本实施例中详尽描述的技术细节,可参见本技术实施例所提供的方法。
[0111]
本发明的实施例还提供一种计算机可读存储介质,存储有计算机程序。计算机程序被处理器执行时实现上述方法实施例。
[0112]
本领域技术人员可以理解,实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序存储在一个存储介质中,包括若干指令用以使得一
个设备(可以是单片机,芯片等)或处理器(processor)执行本技术各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、磁碟或者光盘等各种可以存储程序代码的介质。
[0113]
上述实施例是提供给本领域普通技术人员来实现和使用本发明的,本领域普通技术人员可以在脱离本发明的发明思想的情况下,对上述实施例做出种种修改或变化,因而本发明的保护范围并不被上述实施例所限,而应该符合权利要求书所提到的创新性特征的最大范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。