技术特征:
1.一种方法,包括:从毫米波雷达传感器接收第一雷达数据;用雷达处理链接收超参数集合;基于所述第一雷达数据和所述超参数集合,使用所述雷达处理链生成第一雷达处理输出;使用超参数选择神经网络,基于所述第一雷达处理输出来更新所述超参数集合;从所述毫米波雷达传感器接收第二雷达数据;以及基于所述第二雷达数据和所更新的超参数集合,使用所述雷达处理链生成第二雷达处理输出。2.根据权利要求1所述的方法,其中所述第一雷达处理输出包括第一雷达图像。3.根据权利要求2所述的方法,还包括:基于所述第一雷达数据的最后m帧的聚合,使用所述雷达处理链生成所述第一雷达图像,其中m是大于1且小于或等于32的正整数。4.根据权利要求2所述的方法,还包括:通过基于顺序统计(os)恒虚警率(cfar)os-cfar检测器的输出而掩码距离角图像(rai)或距离多普勒图像(rdi),来生成所述第一雷达图像。5.根据权利要求4所述的方法,其中所述超参数集合包括虚警概率超参数、参考神经元数目超参数和保护神经元数目超参数,其中接收所述超参数集合包括用所述os-cfar检测器接收所述虚警概率超参数、所述参考神经元数目超参数和所述保护神经元数目超参数。6.根据权利要求1所述的方法,还包括:用所述雷达处理链的跟踪器生成热图,并且其中所述第一雷达处理输出包括所述热图。7.根据权利要求1所述的方法,其中所述雷达处理链包括跟踪器,其中所述超参数集合包括门控阈值超参数,并且其中接收所述超参数集合包括用所述跟踪器接收所述门控阈值超参数。8.根据权利要求7所述的方法,其中所述跟踪器包括无迹卡尔曼滤波器。9.根据权利要求1所述的方法,还包括训练所述超参数选择神经网络。10.根据权利要求9所述的方法,其中训练所述超参数选择神经网络包括:使用模仿学习训练所述超参数选择神经网络。11.根据权利要求10所述的方法,其中训练所述超参数选择神经网络还包括:在使用模仿学习训练所述超参数选择神经网络之后,使用强化学习训练所述超参数选择神经网络。12.根据权利要求11所述的方法,其中使用强化学习训练所述超参数选择神经网络包括:使用用于提供值函数的值神经网络和用于提供下三角矩阵的下三角神经网络,其中q函数基于所述值函数和所述下三角矩阵。13.根据权利要求11所述的方法,其中训练所述超参数选择神经网络还包括在强化学习期间使用课程学习。14.根据权利要求11所述的方法,还包括:在强化学习期间使用基于遗漏检测、假警报和预测目标位置与实际目标位置之间的误差距离的奖励函数。15.根据权利要求14所述的方法,还包括:使用预测目标位置和实际目标位置之间的马氏距离来确定所述误差距离。16.根据权利要求14所述的方法,还包括:使用预测目标位置和实际目标位置之间的欧
几里得距离来确定所述误差距离。17.一种方法,包括:从毫米波雷达传感器接收第一雷达数据;用包括跟踪器的雷达处理链接收超参数集合;基于所述第一雷达数据和所述超参数集合,使用所述雷达处理链生成第一雷达图像;基于所述第一雷达图像和所述超参数集合,使用所述跟踪器跟踪目标;使用超参数选择神经网络,基于所述第一雷达图像更新所述超参数集合;从所述毫米波雷达传感器接收第二雷达数据;以及基于所述第二雷达数据和所更新的超参数集合,使用所述雷达处理链生成第二雷达图像。18.根据权利要求17所述的方法,其中所述目标是人类目标。19.根据权利要求17所述的方法,其中所述目标是人的心跳速率。20.根据权利要求17所述的方法,其中所述跟踪器包括卡尔曼滤波器。21.一种毫米波雷达系统,包括:毫米波雷达传感器,被配置为发射雷达信号和接收反射雷达信号,并基于所述反射雷达信号生成雷达数据;以及处理系统,包括:雷达处理链,被配置为基于所述雷达数据和超参数集合生成第一雷达处理输出,以及超参数选择神经网络,被配置为基于所述第一雷达处理输出更新所述超参数集合,其中所述雷达处理链被配置为基于所述雷达数据和所更新的超参数集合生成第二雷达处理输出。22.根据权利要求21所述的毫米波雷达系统,其中所述雷达处理链被配置为基于所述雷达数据来跟踪目标。23.根据权利要求21所述的毫米波雷达系统,其中所述雷达数据包括多个连续帧,并且其中所述超参数选择神经网络被配置为每n帧所述雷达数据更新所述超参数集合,其中n是大于或等于1的正整数。24.根据权利要求21所述的毫米波雷达系统,其中所述超参数选择神经网络包括初始层、多个卷积层和多个密集层。25.根据权利要求21所述的毫米波雷达系统,其中所述第一雷达处理输出包括雷达图像和掩码雷达图像。
技术总结
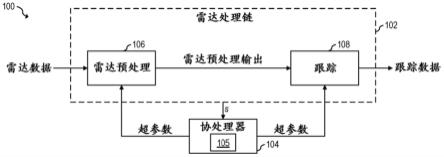
本公开涉及场景自适应雷达。在一个实施例中,一种方法包括:从毫米波雷达传感器接收第一雷达数据;用雷达处理链接收超参数集合;基于第一雷达数据和超参数集合,使用雷达处理链生成第一雷达处理输出;使用超参数选择神经网络基于第一雷达处理输出更新超参数集合;从毫米波雷达传感器接收第二雷达数据;以及基于第二雷达数据和所更新的超参数集合使用雷达处理链生成第二雷达处理输出。理链生成第二雷达处理输出。理链生成第二雷达处理输出。
技术研发人员:L
受保护的技术使用者:英飞凌科技股份有限公司
技术研发日:2022.08.05
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。