1.本发明涉及激光雷达系统,涉及利用波长互不相同的激光的激光雷达系统。
背景技术:
2.通常,激光雷达(light detection and ranging;lidar)为通过测量从发射器发射的激光被物体反射后返回到接收器的飞行时间(time-of-flight;tof)来检测距物体为止的距离的技术。
3.尤其,激光雷达传感器模块可通过应用于自动驾驶汽车、自动驾驶无人机等来检测附近的障碍物。
4.激光雷达系统通常使用光源的单一波长来扫描周围环境,并接收单一波长光的反射光来检测附近障碍物。
5.但是,当其他激光雷达系统位于激光雷达系统的附近且分别利用相同的波段检测障碍物时,具有可能发生激光雷达系统的操作上的干扰的问题。
6.即,在作为三维(3d)空间中的点的集合的三维点云数据(3dpoint cloud data)上产生噪声,降低信噪比(snr),从而可能降低整个测量距离或发生噪声引起的识别及其他功能上的误差。
7.并且,具有单一波长光源、单一接收系统的激光雷达系统需应用用于补偿接收信号的游走误差(walk error)的附加延迟单元或多个比较单元,因此,需要构成更加复杂的电路,并需要用于信号处理补偿的单元。
8.因此,需要提供可防止使用多个激光雷达系统引起的相互干涉的单元及可简化电路的技术单元。
9.针对使用多个波长的激光雷达系统,提出了韩国授权专利10-2136402号(2020年7月15日授权,多-波长图像激光雷达传感装置及其的信号处理方法)。
10.但是,在上述的授权专利中,使用多-波长的激光雷达传感器来检测距物体的距离及形状信息,同时,可获得物体的颜色、反射率等的信息,但具有难以解决上述单一波长激光雷达系统所具有的所有问题的缺点。
技术实现要素:
11.(一)要解决的技术问题
12.考虑如上所述的问题的本发明所要解决的技术问题在于,提供一种激光雷达系统,其可防止与附近其他激光雷达系统的干扰。
13.并且,本发明所要解决的另一问题在于,提供一种激光雷达系统,其防止干扰发生,且不使用用于补偿干扰的额外的附加电路。
14.同时,本发明提供一种激光雷达系统,其减少激光雷达接收电路的耗电,同时,可使电磁干扰(emi)影响最小化。
15.(二)技术方案
16.用于解决如上所述的问题的本发明的激光雷达系统可包括:收发部,产生互不相同的波长的光,接收从目标反射的互不相同的波长的反射光;分束器,将上述收发部的互不相同的波长的光相对分为长波光及短波光;以及扫描镜,向外部照射在上述分束器中被分类的长波光及短波光,通过上述分束器将长波光及短波光的反射光入射至上述收发部。
17.在本发明的实施例中,上述分束器可包括第一面,用于反射上述长波光;以及第二面,位于上述第一面的相反面,用于反射上述短波光。
18.在本发明的实施例中,可通过调节作为上述第一面与第二面之间的间隔的厚度来调节上述长波光与上述短波光的光轴间隔。
19.在本发明的实施例中,上述光轴间隔可与上述厚度成正比。
20.在本发明的实施例中,上述长波光的垂直发散角可小于上述短波光的垂直发散角。
21.在本发明的实施例中,在上述收发部中,控制上述长波光及上述短波光的触发时间的延迟,可通过组合上述长波光及短波光的波形来生成新的输出光波形。
22.在本发明的实施例中,上述收发部包括将反射光转换为电信号的单元阵列,上述单元阵列的多个单元分别可接收长波长反射光及短波长反射光两者。
23.在本发明的实施例中,在上述单元阵列的上部可包括用于使长波长反射光及短波长反射光通过的滤波器。
24.在本发明的实施例中,上述收发部包括将反射光转换为电信号的单元阵列,上述单元阵列的多个单元中的位于中心部的多个单元分别可接收长波长反射光及短波长反射光的两者,除位于上述中心部的多个单元之外的其他多个单元可接收短波长反射光。
25.在本发明的实施例中,在稳定状态下,将阈值电压以上的上述长波光及上述短波光的时域指定为检测信号的参考时域,上述的激光雷达系统还可包括处理器,其利用随着接收信号的电平降低或提高而检测到的时域与上述参考时域的比例来补偿游走误差。
26.在本发明的实施例中,上述收发部的接收电路可包括:接收部,以与多通道激光雷达传感器的通道数相同的数量配置,用于检测光;以及时序控制部,对上述多个接收部分别进行使能控制,在每个接收部的使能时刻留有差异来进行控制。
27.在本发明的实施例中,上述接收部为作为4以上的整数的n个,上述接收部包括:光电二极管,用于检测光;以及放大部,用于放大上述光电二极管的检测信号,上述时序控制部可向上述多个接收部的每个放大部的使能端子分别输出接收使能信号。
28.在本发明的实施例中,上述接收部为作为4以上的整数的n个,上述接收部包括:光电二极管,用于检测光;以及放大部,用于放大上述光电二极管的检测信号,上述时序控制部将与用于输出激光的发送使能信号同步的一个接收使能信号输出至第一个上述放大部的使能端子,可通过分别连接上述多个放大部的使能端子对的n-1个延迟部控制上述多个接收部的使能时序。
29.在本发明的实施例中,n个上述接收使能信号可分别以所设定的时间从第一个接收使能信号阶段式延迟至第n个接收使能信号。
30.在本发明的实施例中,n个上述接收使能信号可包括:第一时间段,使上述放大部依次使能;以及第三时间段,使上述放大部依次禁用。
31.在本发明的实施例中,n个上述接收使能信号包括将所有上述放大部保持使能状
态的第二时间段,上述第二时间段可短于一个接收使能信号的使能时间段。
32.在本发明的实施例中,上述第二时间段可以为从第n个接收使能信号的上升沿至第一个接收使能信号的下降沿为止。
33.在本发明的实施例中,n个上述接收使能信号包括从上述第三时间段至下一帧的第一时间段的开始为止的第四时间段,在第四时间段中,可将所有上述放大部保持禁用状态。
34.(三)有益效果
35.本发明使用光源的波长不同的两束光,通过调整两束光的光轴间的距离来使每个激光雷达系统具有固有的发光模式,从而具有可防止发生与相邻的其他激光雷达系统的干扰现象的效果。
36.此外,本发明在波长不同的两束光的脉冲宽度、强度、延迟时间等留有差异,从而具有可避免干扰的效果。
37.如上所述,本发明至少通过调整长波光与短波光的光轴间距离来防止发生干扰现象,因此,即使不使用额外的附加元件也可补偿游走误差。
38.并且,一次测量的光源的发射分为长波光及短波光并具有规定的延迟时间,因此,一次发射标准峰值时间相对低,从而具有对于眼睛安全(eye safety)更有利的效果。
39.并且,本发明具有通过改变收发部的接收电路的配置来减少耗电并使电磁干扰影响最小化的效果。
附图说明
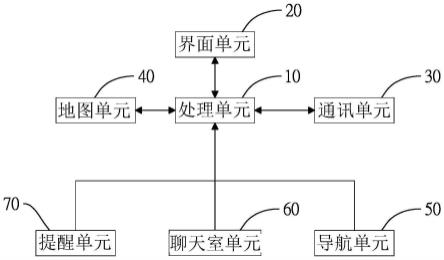
40.图1为本发明优选实施例的激光雷达系统的结构图。
41.图2为从本发明的激光雷达系统中发出的长波光及短波光的侧视示意图。
42.图3为图2的俯视示意图。
43.图4为应用于本发明的接收单元阵列的排列状态图。
44.图5为用于说明短波光及长波光的触发时序控制的一例的波形图。
45.图6至图8分别为用于说明本发明的接收信号游走误差(walk error)补偿的波形图。
46.图9为本发明收发部的接收电路的电路图。
47.图10为图9中的时序控制部的接收使能信号的时序图。
48.图11为本发明另一实施例的接收电路的电路图。
49.图12为接收电路的模拟结果图。
50.附图标记说明
51.10:收发部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20:透镜部
52.30:分束器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40:入射透镜
53.50:扫描镜
具体实施方式
54.以下,参照附图详细说明本发明的利用互不相同的波长的光源的激光雷达系统。
55.本发明的实施例为了向本技术领域的普通技术人员更完整地说明本发明而提供,
以下所说明的实施例可变形为多个其他形式,本发明的范围并不限定于下述实施例。反而,这些实施例使本发明更加充足且完整,并为了将本发明的思想完整地传递至普通技术人员而提供。
56.在本说明书中使用的术语用于说明特定实施例,并不限定本发明。如在本说明书中所使用,除非在文脉上明确指出其他情况,否则单数的形态可包括复数的形态。并且,在本说明书中使用的情况下,“包括(comprise)”和/或“包括
……
的(comprising)”用于特定所提及的形状、数字、步骤、操作、部件、因素和/或它们的组合的存在,并不排除一个以上的其他形状、数字、步骤、操作、部件、因素和/或多个组的存在或附加。如在本说明书中所使用,术语“和/或”包括相应所列举的项目中的一个以上的所有组合。
57.在本说明书中,第一、第二等的术语用于说明各种部件、区域和/或部位,但这些部件、构件、区域、多个层和/或多个部位并不限定于这些术语,这是显而易见的。这些术语并不指特定顺序或上下或优劣,仅用于区分一个部件、区域或部位与其他部件、区域或部位。因此,以下详述的第一部件、区域或部位可在不超出本发明的教导的情况下指代第二部件、区域或部位。
58.以下,参照简要示出本发明的实施例的附图来对本发明的实施例进行说明。在附图中,例如,可根据制造技术和/或公差预测所图示的形状的变形。因此,本发明的实施例不应解释为局限于在本说明书中示出的区域的特定形状,例如,应包括因制造引起的形状变化。
59.图1为本发明优选实施例的激光雷达系统的结构图。
60.参照图1,本发明可包括:收发部10,输出具有相对短波长及长波长的激光;分束器30,从通过透镜部20入射的上述收发部10的光中分离长波长及短波长;以及扫描镜50,通过入射透镜40反射在上述分束器30中分割的长波长及短波长的光,并将光发射到外部。
61.以下,对由如上所述的方式构成的本发明的激光雷达系统的结构及作用进行更加详细地说明。
62.首先,收发部10包括至少一个光源,虽可在之后的说明中省略,但假设包括光接收元件。
63.上述收发部10的光源可以为输出长波长及短波长的单一光源或多个光源。此时,长波长及短波长为相对概念,具体的波长范围属于激光的波长范围。
64.即,短波长只要波长短于长波长就可使用。
65.光源可使用边缘发射激光器(edge emitting laser,eel)、垂直腔面发射激光器(vertical cavity surface emitting laser,vcsel)或微透镜阵列(micro lens array,mla)。
66.假设透镜部20包括发射及接收光所需的至少一种透镜及滤波器。
67.包括从上述收发部10的光源发射的长波长及短波长的光通过透镜部20入射至分束器30及被分束器30反射。
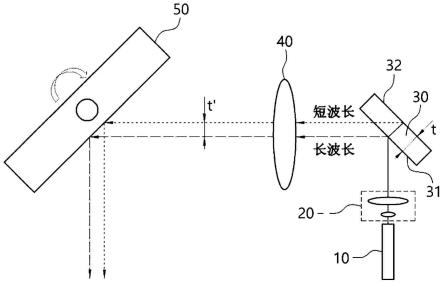
68.此时,分束器30以90度方向反射从收发部10的光源输出的光,以使长波光及短波光成为规定光轴间距离t’的方式水平移动各个光轴并反射。
69.分束器30包括:第一面31,用于反射长波长;以及第二面32,位于第一面31的相反侧。
70.根据对应于上述第一面31与第二面32之间的间隔的分束器30的厚度t确定前述所说明的光轴间距离t’。
71.上述光轴间距离t’与分束器30的厚度t成正比。
72.对于包括具有相对波长的长度差异的长波长及短波长的光,长波光从作为分束器30的入射面的第一面31反射至入射透镜40侧,短波光被第一面31折射且被第二面32反射来入射至入射透镜40。
73.此时,所分离的短波光与长波光相互平行。
74.所分离的长波光及短波光分别被扫描镜50反射来向外部发出。在本发明中,可将有利于眼睛安全(eye safety)的长波光用作主光束(main beam),可将短波光用作副光束(sub beam)。
75.上述扫描镜50执行通过旋转将长波光及短波照射至设置区域的扫描,以规定时序驱动。
76.通过扫描镜50发出的光被周围客体反射,此时的反射光也分为长波光的反射光及短波光的反射光,以发出过程的相反方向接收来由收发部10接收。
77.由此,可检测物体的位置。
78.以下,对通过上述扫描镜50发出的长波光及短波光进行更详细地说明。
79.图2为从本发明的激光雷达系统1发出的长波光及短波光的侧视示意图,图3为俯视示意图。
80.参照图2及图3,长波光及短波光的垂直发散角均可具有相同的基本驱动状态。
81.在基本驱动状态下,接收及发射具有相同的垂直视角。
82.除上述基本驱动之外,可通过缩小长波光的垂直发散角tx_l并聚焦于中心视角,从而可增加检测距离。
83.此时,即使变更长波光的垂直发散角tx_l,长波光也有利于眼睛安全,因此,不发生光的聚焦引起的问题。
84.并且,对于短波光,虽相对不利于眼睛安全,但传感器中的灵敏度佳,因此,能够以相对宽的垂直发散角tx-s实现来扫描短距离的宽区域。
85.针对这种变形驱动,接收垂直视角rx_v可随着短波光的垂直发散角tx-s的增加而增加。即,接收垂直视角rx_v与垂直发散角tx-s成为相同的角度。
86.并且,在基本驱动中,长波光与短波光具有相同视野的发散角,分别通过分束器30平行,并产生光轴间距离不是0的正实数的差异。
87.因此,接收水平视角rx_h为包括长波光的水平发散角tx_hs及短波光的水平发散角tx_hl与光轴之间的距离的角度。
88.为了接收具有以上所说明的接收垂直视角rx_v及接收水平视角rx_h的本发明的反射光,多个接收单元阵列应设置于收发部10。
89.图4为应用于本发明的接收单元阵列的排列状态图。
90.如图4所示,构成各接收单元阵列的多个单元分别可接收长波长的反射光及短波长的反射光两者,根据单元的数量确定分辨率。
91.图4示出垂直方向上的一行的单元阵列。图4的(a)部分示出长波光的垂直发散角tx_l与短波光的垂直发散角tx_s相同的基本驱动状态下的一个单元(cell)同时接收长波
长反射光及短波长反射光的状态。
92.这是因为长波光的垂直发散角tx_l及短波光的垂直发散角tx_s与接收垂直视角rx_v相同。
93.并且,在变形驱动状态下,长波光的垂直发散角tx_l为窄于短波光的垂直发散角tx_s的角度,此时,如图4的(b)部分,单元阵列的中心部分接收长波长的反射光及短波长的反射光,侧面部仅接收短波长的反射光。
94.并且,优选地,除透镜之外,在透镜部20应用可使长波长及短波长均可通过的频带的带通滤波器(band pass filter)。
95.如图4的(b)部分的情况,在特定接收短波长的单元的情况下,可在接收其短波长的单元的上部应用仅使短波长反射光通过的滤波器来提高信噪比。
96.如上所述,可通过调整分束器30的厚度来使用与相邻的其他激光雷达系统不同的光信号,因此,可防止发生与相邻的其他激光雷达系统的干扰。
97.此外,还可通过改变长波光及短波光的触发时间(trigger time)来防止发生具有相同间隔的光轴之间的距离的激光雷达系统之间的干扰。
98.图5为用于说明短波光及长波光的触发时序控制的一例的波形图。
99.参照图5,可将短波光的垂直发散角tx_s控制得大,并将长波光的垂直发散角tx_l控制得小。如上所述,这考虑了眼睛安全特性。
100.例如,短波光可具有10ns的宽度且长波光可具有5ns的宽度,可通过延迟长波光的输出来产生并输出所要的波形。触发时间的延迟可在收发部10中执行。
101.因此,本发明可通过触发时序控制制造各种形态的输出光波形,这还对被目标反射而被激光雷达系统接收的反射光产生影响。
102.如上所述,可通过各种反射光波形与其他激光雷达系统进行区分,从而可防止干扰的发生。
103.图6至图8分别为用于说明本发明的接收信号游走误差补偿的波形图,图6为基准值,图7为信号强度减少时的补偿,图8示出对于长波长反射光饱和时的补偿的例。
104.参照图6,收发部10的接收单元阵列根据反射光的接收而输出电压信号,可检测长波长反射光的接收波形l及短波长反射光的接收波形s。
105.其中,可通过检测所有信号而不检测目标,从而可设置作为最小检测电压的阈值电压vth。即,仅将长波长接收波形l及短波长接收波形s中的阈值电压vth以上的电压用作检测信号。
106.第一个边沿为对于长波长接收波形l的检测信号,第二个边沿为对于短波长接收波形s的检测信号。
107.长波长接收波形的阈值电压以上的电压区间为a,上升区间tr(l)可由b表示,下降区间tf(l)可由c表示。
108.上升区间tr(l)为从阈值电压vth至长波长接收波形l的峰值点为止的区间,下降区间tf(l)为从峰值点至阈值电压vth为止的区间。
109.总时间(total time,t)为从阈值电压与长波长接收波形的上升区间tr(l)的接点至短波长接收波形的下降区间tr(s)与阈值电压的接点为止的时间,发送延迟时间(tx delay time,ds)为长波长接收波形l的峰值点与短波长接收波形s的峰值点为止的时间。
110.其中,发送延迟时间ds为之前说明的收发部10的延迟时间,可被视为系统常数。
111.与此相同地,在第二个边沿中,短波长接收波形s的上升区间tr(s)与阈值电压vth的接点和下降区间tf(s)与阈值电压vth的接点之间的区间成为检测信号的时间d。
112.e及f分别表示上升区间tr(s)与阈值电压vth的接点到短波长接收波形s的峰值点为止的时间、从峰值点到下降区间tf(s)与阈值电压vth相遇的点为止的时间。
113.以上,除ds之外的a、b、c、d、e、f、t均为检测值。
114.图7示出检测值相比于图6的状态减少的例。即,表示相比于图6,构成检测信号的a'、b'、c'、d'、e'、f'均得以减少。
115.此时,若假设表示长波长检测信号的时间的a'/a的比为α、表示短波长检测信号的时间的d'/d的比为β,α及β均成为小于1的值。
116.使用此时的减少比,可在信号强度降低时,以参照图6说明的波形的水平补偿游走误差。优选地,以上升时间快的长波长为基准计算。
117.图8示出与图7相反的,因接收信号的波形增加而难以检测峰值点的情况。此时,依然以长波长接收波形l的a区间为基准,求得饱和状态的长波长接收波形l的a'区间的长度之比α。
118.α可以为大于1的实数,可求得此时的α增加比。
119.并且,以短波长接收波形s的d区间为基准,可求得饱和状态的短波长接收波形s的d'区间的长度之比β。此时,β为大于1的实数,可利用其求得e'、f'等。
120.在饱和状态下,优选地,利用β执行补偿。这是因为,峰值的高度相对低,因此,利用保持线性的短波长接收波形s求得校正值。
121.并且,优选地,将发送延迟时间ds设置为附图中的交叉点位于阈值电压vth以下。
122.如上所述,本发明的特征在于,可使用互不相同的波长的两束输出光补偿接收波形的误差,即使不使用额外的补偿电路,也可进行补偿,从而可简化电路。
123.虽未在附图等中示出这种补偿的处理,但可在解释用于补偿的接收信号的处理器中执行。
124.图9为应用于本发明的多通道激光雷达的接收电路图,图10为图9中的时序控制部的接收使能信号的时序图。
125.分别参照图9及图10,本发明包括:n个接收部110-1~110-n,分别形成通道,用于接收被客体反射的激光;以及时序控制部120,用于控制上述接收部110-1~110-n各自的使能状态。
126.上述接收部110-1~110-n分别可以为相同的结构,作为其例,可包括:光电二极管pd,用于接收被客体反射的激光;放大部tia,通过上述时序控制部120的接收使能信号rxe进行使能控制来放大光电二极管pd的输出;以及模数转换器adc,将上述放大部tia的输出转换为数字信号。
127.根据接收部110-1~110-n的数确定激光雷达接收电路的通道数。
128.上述时序控制部120向设置于用于形成各个多通道的接收部110-1~110-n的放大部tia的使能端子en提供互不相同的时序的接收使能信号rxe#1~rxe#n,可包括多个开关电路。
129.如图10所示,从上述时序控制部120中提供的多个接收使能信号rxe#1~rxe#n分
别具有相同长度的高电位区间(相同周期),以与依次设置的延迟时间相同的时间延迟来输入至各个接收部110-1~110-n的放大部tia的使能端子en。
130.本发明利用接收使能信号控制放大部tia的使能状态,放大部tia在接收使能信号rxe#1~rxe#n的高电位区间使能,在低电位区间(禁用区间)禁用而并不运行。
131.在上述中,n或n为正的整数,考虑多通道激光雷达为至少4个通道以上,n或n为4以上的整数。
132.因此,本发明使放大部tia在禁用区间并不耗电,从而可降低耗电,且并不是同时开启及关闭电源的方式,因此,可使电磁干扰的发生最小化。
133.上述时序控制部120的接收使能信号rxe#1~rxe#n可分为4个时序区间来进行说明。
134.再次参照图10,在规定时间内输出发送使能信号txe,并且与此同步,向第一个接收部110-1的放大部tia的使能端子输入第一个接收使能信号rxe#1来放大光电二极管pd的光接收信号,并在模数转换器adc中转换为数字信号来输出。
135.之后,在所设置的时间后,向第二个接收部110-2的放大部tia的使能端子输入第二个接收使能信号rxe#2,从而使作为第二个通道的接收部110-2进行工作。
136.依次重复如上所述的过程,最后,第n个接收使能信号rxe#n输入至第n个接收部110-n的放大部tia,并可通过作为第n个通道的接收部110-n检测光。
137.如上所述,将从第一个接收使能信号rxe#1的上升沿至第n个接收使能信号rxe#n的上升沿为止定义为第一时间段t1,第一时间段t1为各接收部110-1~110-n通过时序控制部120留有时间差被使能的区间。
138.即,可理解为多通道激光雷达接收电路的多个通道被依次开启,因此,可使电磁干扰的产生最小化。
139.之后,第二时间段t2为实际上短于一个接收使能信号的高电位区间的时间,此时,为用于计算通过激光雷达传感器检测的物体为止的距离的接收信号等待时间。
140.第二时间段t2从第n个接收使能信号rxe#n的上升沿开始,并在第一个接收使能信号rxe#1的下降沿结束。
141.接着,从第一个接收使能信号rxe#1的下降沿至第n个接收使能信号rxe#n的下降沿为止的第三时间段t3为构成各通道的n个接收部110-1~110-n隔着时间差关闭的区间。
142.此时,也可通过防止快速的电力转换来使电磁干扰的发生最小化。
143.在所有接收部110-1~110-n关闭后到在下一帧输出发送使能信号txe为止,保持用于维持接收部110-1~110-n关闭的状态的第四时间段t4。
144.在第四时间段t4中,所有接收部110-1~110-n处于关闭的状态,因此,可减少耗电。
145.因此,本发明可在多通道激光雷达接收电路中减少耗电的同时防止过热,并可通过依次的使能控制使电磁干扰的发生最小化。
146.图11为本发明另一实施例的多通道激光雷达的收发部10的接收部电路图。
147.参照图11,对于在上文中参照图9进行说明的配置,时序控制部120根据发送使能信号输出一个接收使能信号rxe#1。
148.设置于每个接收部110-1~110-n的多个放大部tia的使能端子en之间,分别串联
连接延迟部130-1~130-n-1。
149.即,第一个延迟部130-1用于使第一个接收部110-1的放大部tia的使能端子与第二个接收部110-2的放大部tia的使能端子之间相连接。
150.并且,第二个延迟部130-2用于使第二个接收部110-2的放大部tia的使能端子与第三个接收部110-3的放大部tia的使能端子之间相连接。
151.通过如上所述的多个延迟部的连接,第n-1个延迟部130-n-1使第n-1个接收部110-n-1的放大部tia的使能端子与第n个接收部110-n的放大部tia的使能端子之间相连接。
152.如之前参照图10所说明,这种多个延迟部130-1~130-n-1各个信号延迟时间可视为与接收使能信号rxe#1~rxe#n各自的延迟时间相同。
153.因此,通过使用多个延迟部130-1~130-n-1,时序控制部120仅输出第一个接收使能信号rxe#1,也可生成延迟第一个接收使能信号rxe#1之后的接收使能信号rxe#2~rxe#n来输入至各放大部tia的使能端子。
154.图11中示出的实施例也以与图10的时序图相同的具有第一时间段t1、第二时间段t2、第三时间段t3及第四时间段t4的方式进行操作,因此,与前述的例相比,仅在电路的构成中存在差异,但示出相同的作用及效果。
155.图12为本发明的多通道激光雷达接收电路的模拟结果。
156.参照图12,在本发明中,根据接收使能信号的依次控制来对作为各通道的接收部110-1~110-n的放大部tia进行使能控制,在以往,作为开启及关闭电源的控制,以往发生快速的电流变化引起的电源故障(glitch)现象。
157.但是,在本发明中,相对缓慢地控制电流变化,从而可缓解电源故障。已知故障为发生电源电磁干扰的原因,因此,本发明可减少电源电磁干扰。
158.如可在整个电流变化量的曲线图看出,本发明及现有的电路均从64ma转换为400ma,在以往,进行快速的电流变化,相反,本发明可确认,相对地,根据时间形成平缓的倾斜并变化。
159.本发明并不限定于上述实施例,可在不超出本发明的技术主旨的范围内,实施各种修改、变形,这对本发明所属技术领域的普通技术人员而言是显而易见的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。