1.本发明涉及车辆用门,特别是不具有机械式的门把手的车辆用门的操作装置。
背景技术:
2.在专利文献1中记载有具备以大致中央为界向前后对在车体的侧面形成的上下车口进行开闭的前滑动门和后滑动门的双开门式的车辆。前滑动门通过向前方滑动而开放上下车口的前半部分,后滑动门通过向后方滑动而开放上下车口的后半部分。
3.此外,近年来,特别是在共享汽车等车辆中,正在推行可动部分的电动化、自动运行化,特别是,对于能够通过电动而进行自动开闭的滑动门,通过电动分别使用于将滑动门保持在关闭位置的关闭锁紧单元和用于将滑动门保持在全开位置的全开锁紧单元进行锁紧解除动作,从而出现了不具有如以往那样在对各滑动门进行开闭操作时被操作的机械式的门把手的滑动门。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2005-88813号公报
技术实现要素:
7.发明要解决的问题
8.然而,在滑动门不具有机械式的门把手的车辆中,在电力系统发生故障的情况下,无法打开滑动门。作为解决该问题的方法,在电力系统发生故障的情况下,从阻止非法人员非法进入车内的观点出发,考虑到在车内设置能够仅从车内侧进行操作的应急手柄,但如此一来,对于仅在车内设置应急手柄,虽然基于应急手柄的操作从车内将滑动门暂时打开,但是之后,若在下车之后从车外关闭滑动门,则关闭锁紧单元成为锁紧状态,滑动门被保持在关闭位置,之后,会发生无法再一次打开滑动门的情况,有可能对之后的修理带来不良的影响。
9.因而,在利用应急手柄打开滑动门之后,为了能够容易地进行之后的修理,期望的是,在将车辆输送至修理工厂之前滑动门不保持在关闭位置。
10.本发明鉴于上述的问题,其目的在于提供在利用应急手柄打开门之后使门不保持在关闭位置的车辆用门的操作装置。
11.用于解决问题的方案
12.根据本发明,上述问题如以下这样解决。
13.在车辆用门的操作装置中,该车辆用门的操作装置包括:关闭锁紧单元,其能够将以可开闭的方式支承于车体的门保持在关闭位置;全开锁紧单元,其能够将所述门保持在全开位置;致动器,其具有马达;应急手柄,其能够从车内侧进行手动操作;以及操作中继单元,其在通过所述致动器驱动的情况下,使所述关闭锁紧单元和所述全开锁紧单元分别进行锁紧解除动作,在通过所述应急手柄进行手动操作的情况下,使所述关闭锁紧单元进行
锁紧解除动作,且使其能够保持为非锁紧状态。
14.优选的是,所述操作中继单元在通过所述应急手柄进行手动操作的情况下,不使所述全开锁紧单元进行锁紧解除动作。
15.优选的是,所述操作中继单元具有:底板;全开解除杆,其支承于所述底板,与所述全开锁紧单元连结,并且基于所述致动器的驱动而进行动作,使所述全开锁紧单元进行锁紧解除动作;关闭解除杆,其支承于所述底板,与所述关闭锁紧单元连结,并且基于所述致动器的驱动而进行动作,使所述关闭锁紧单元进行锁紧解除动作;应急杆,其支承于所述底板,并且基于所述应急手柄的手动操作而向锁紧解除方向进行动作,从而使所述关闭解除杆向锁紧解除方向进行动作而不使所述全开解除杆向锁紧解除方向进行动作;以及保持构件,其在所述应急杆向锁紧解除方向转动时,能够将所述应急杆保持在锁紧解除位置,以便能够将所述关闭解除杆保持在锁紧解除位置。
16.优选的是,所述保持构件基于所述应急手柄的手动操作,通过与在所述底板设置的被卡合部卡合而将所述应急杆保持在锁紧解除位置,并基于通过所述致动器的驱动进行的所述全开解除杆的向锁紧解除方向的动作,解除与所述被卡合部的卡合,从而能够使所述应急杆从锁紧解除位置返回到初始位置。
17.优选的是,所述保持构件支承于所述应急杆,在弹簧的作用力的作用下与所述被卡合部卡合。
18.优选的是,所述应急手柄通过开放在所述门的门饰板设置的开口部而使操作部暴露在所述开口部,能够从初始位置向锁紧解除方向进行手动操作,且在所述应急杆被保持在锁紧解除位置的情况下,使所述操作部的一部分隐藏在所述门饰板的里侧,使得无法对所述操作部进行手动操作。
19.优选的是,在所述操作中继单元和所述应急手柄之间,且在与所述门饰板的所述开口部相面对的位置设有将所述操作中继单元和所述开口部之间隔断的防护板。
20.发明的效果
21.根据本发明,在电力系统发生故障等而致动器无法驱动的情况下,由于在利用应急手柄打开门之后使门不保持在关闭位置,因此,能够容易地进行之后的修理。
附图说明
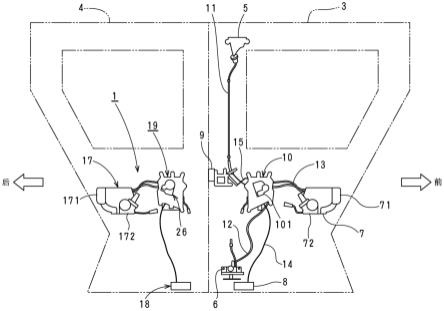
22.图1是应用本发明的车辆用门的操作装置的车辆的侧视图。
23.图2是表示前滑动门和后滑动门的内部构造的侧视图。
24.图3是从车外侧观察操作中继单元的侧视图。
25.图4是从车内侧观察操作中继单元的侧视图。
26.图5是操作中继单元的立体图。
27.图6是操作中继单元的分解立体图。
28.图7是图4中的vii-vii线剖视图。
29.图8是初始状态下的操作中继单元的主要部分的侧视图。
30.图9是致动器驱动时的操作中继单元的侧视图。
31.图10是应急手柄被操作时的操作中继单元的侧视图。
32.图11是通过致动器的驱动而解除保持构件的卡合状态时的操作中继单元的侧视
图。
33.图12是图8中的xii-xii线放大剖视图。
34.图13是图9中的xiii-xiii线剖视图。
35.图14是图10中的xiv-xiv线剖视图。
36.图15是图11中的xv-xv线剖视图。
37.附图标记说明
38.1、车辆用门的操作装置;2、车体;3、前滑动门;4、后滑动门;41、门饰板;41a、开口部;42、盖;5、上关闭锁紧单元;6、下关闭锁紧单元;7、中间关闭锁紧单元;71、锁紧机构部;72、关闭机构部;8、全开锁紧单元;9、应急手柄;10、操作中继单元;101、致动器;11、12、13、14、15、操作力传递构件;16、关闭撞针;17、关闭锁紧单元;171、锁紧机构部;172、关闭机构部;173、闩;173a、卡合爪部;174、棘轮;18、全开锁紧单元;19、操作中继单元;20、底板;201、开口部;201a、被卡合部;21、轴;22、全开解除杆;221、第1臂部;222、第2臂部;223、第3臂部;224、解除部;23、关闭解除杆;231、抵接部;24、应急杆;241、上臂部;242、支承片;25、保持构件;251、轴部;252、凸部;253、卡合台阶部;26、致动器;261、壳体;262、马达;263、264、265、减速齿轮;266、输出杆;27、应急手柄;271、操作部;28、防护板;29、弹簧;30、第1操作力传递构件;31、弹簧;32、第2操作力传递构件;33、弹簧;34、弹簧。
具体实施方式
39.以下,基于附图对本发明的一实施方式进行说明。另外,本发明不被以下说明的实施方式限定,也包括本领域技术人员根据以下的实施方式在显而易见的范围内适当地变更的内容。
40.图1示出应用本发明的车辆用门的操作装置1的车辆的侧视图。该车辆是具备能够对在车体2的侧面设置的上下车口进行开闭的前滑动门3和后滑动门4的双开门式的车辆,在车外侧和车内侧未设置在通常情况下能够由使用者手动操作的门把手和锁钮。本实施方式的车辆用门的操作装置1被应用于后滑动门4。但是,本发明不限定于本实施方式,也能够应用于前滑动门3。各门3、4的开闭操作通过具有电驱动源的后述的致动器101、26的动作来进行,该电驱动源基于使用者携带的远程操作开关或设于各门3、4的操作开关的操作而驱动。
41.前滑动门3沿前后方向移动自如地被安装于上下车口的前上部的未图示的上导轨、安装于车体2的前中央部的未图示的中间导轨以及安装于上下车口的前下部的未图示的下导轨分别支承,该前滑动门3通过在车体2配置的未图示的自动开闭装置的马达等的动力,从图1所示的关闭位置向前方进行自动打开动作,从而开放上下车口的前半部分,此外,从全开位置向后方进行自动关闭动作,从而关闭上下车口的前半部分。
42.后滑动门4沿前后方向移动自如地被安装于上下车口的后上部的未图示的上导轨、安装于车体2的后中央部的未图示的中间导轨以及安装于上下车口的后下部的未图示的下导轨分别支承,该后滑动门4通过在车体2配置的未图示的自动开闭装置的马达等的动力,从图1所示的关闭位置向后方进行自动打开动作,从而开放上下车口的后半部分,此外,从全开位置向前方进行自动关闭动作,从而关闭上下车口的后半部分。
43.如图1、2所示,在前滑动门3安装有:上关闭锁紧单元5和下关闭锁紧单元6,其通过
与在车体2的上部、下部分别固定的未图示的撞针啮合,从而将前滑动门3保持在关闭位置;中间关闭锁紧单元7,其通过与在车体2固定的未图示的撞针啮合,从而与上关闭锁紧单元5和下关闭锁紧单元6一起将前滑动门3保持在关闭位置;全开锁紧单元8,其通过与在车体2固定的未图示的全开撞针啮合,从而将前滑动门3保持在全开位置;应急手柄9,其用于在发生紧急情况的时候进行操作;以及操作中继单元10,其分别连结各关闭锁紧单元5、6、7、全开锁紧单元8以及应急手柄9,未设置用于打开前滑动门3的机械式的门把手和锁定/解锁用的操作钮。因而,除了紧急情况以外,打开前滑动门3时的各关闭锁紧单元5、6、7的解除操作和关闭前滑动门3时的全开锁紧单元8的解除操作全部由在操作中继单元10设置的电动式的致动器101来进行。
44.中间关闭锁紧单元7具有:锁紧机构部71,其用于通过与未图示的撞针啮合而将前滑动门3保持在关闭位置;以及电动式的关闭机构部72,其利用电动力使前滑动门3从即将关闭之前的位置(半锁紧位置)强制地移动至关闭位置(全锁紧位置)。
45.应急手柄9设于前滑动门3的后端面,在前滑动门3和后滑动门4一起关闭的情况下,由于被后滑动门4的前端面遮盖而不能操作,通过打开后滑动门4使其露出而能够操作,由此,在电力系统发生故障而不能驱动致动器101等紧急情况发生的时候,如果后滑动门4处于打开状态,则能够通过操作应急手柄9,使各关闭锁紧单元5、6、7进行锁紧解除动作而打开前滑动门3。
46.操作中继单元10通过各种杆经由鲍登线等操作力传递构件11、12、13、14、15分别与上关闭锁紧单元5、下关闭锁紧单元6、中间关闭锁紧单元7、全开锁紧单元8以及应急手柄9连结,从而基于致动器101的电动动作或应急手柄9的手动操作使上关闭锁紧单元5、下关闭锁紧单元6、中间关闭锁紧单元7以及全开锁紧单元8解除动作。另外,前滑动门3的操作中继单元10与设于后滑动门4的后述的操作中继单元19为前后对称构造,基本结构相同,因此,在此省略详细说明。
47.在后滑动门4安装有:关闭锁紧单元17,其通过与在车体2固定的关闭撞针16(参照图8)啮合,从而将后滑动门4保持在关闭位置;全开锁紧单元18,其通过与在车体2固定的未图示的全开撞针啮合,从而将后滑动门4保持在全开位置;以及操作中继单元19,其与各锁紧单元17、18分别连结,后滑动门4未设置机械式的门把手。因而,除了在电力系统发生故障等紧急情况发生的时候以外,打开后滑动门4时的关闭锁紧单元17的解除操作和关闭后滑动门4时的全开锁紧单元18的解除操作全部由在操作中继单元19设置的电动式的致动器26来进行。
48.关闭锁紧单元17具有:锁紧机构部171,其用于通过与关闭撞针16啮合而将后滑动门4保持在关闭位置;以及关闭机构部172,其利用电动力使后滑动门4从即将关闭之前的位置(半锁紧位置)强制地移动至关闭位置(全锁紧位置)。
49.如图8~图11所示,锁紧机构部171具有:闩173,其能够转动地支承于未图示的基部,并且在后滑动门4关闭时,能够与关闭撞针16啮合;以及棘轮174,其能够转动地支承于基部,并且通过与在闩173设置的卡合爪部173a卡合,从而能够阻止与关闭撞针16啮合的闩173的转动并保持闩173和关闭撞针16的啮合状态。
50.另外,在本实施方式的说明中使用的表述“锁紧状态”定义为关闭撞针16与闩173啮合且棘轮174与闩173的卡合爪部173a卡合的状态,表述“非锁紧状态”定义为棘轮174从
闩173的卡合爪部173a脱离的状态。
51.如图3~图7所示,操作中继单元19具备:底板20,其固定于后滑动门4的内板的内侧面;全开解除杆22、关闭解除杆23以及应急杆24,其由朝向车内外方向的轴21支承为分别能够转动;保持构件25,其能够将应急杆24保持在锁紧解除位置;电动式的致动器26,其内置有马达262;应急手柄27,其固定于轴21;以及防护板28,其固定于底板20。
52.致动器26具有:壳体261,其固定于底板20的朝向车外侧的面;马达262,其内置于壳体261内;减速齿轮263、264、265,其使马达262的旋转减速;以及输出杆266,其以能够与最终的减速齿轮265一体转动的方式可转动地支承于壳体261,根据使用者持有的携带用的开关或设于后滑动门4的操作开关的操作来驱动马达262,通过输出杆266从初始位置(图3、图4所示的位置)向锁紧解除方向(在图3中为顺时针方向,在图4中为逆时针方向)转动规定角度,从而如后所述那样使全开解除杆22和关闭解除杆23进行解除动作而能够进行后滑动门4的关闭操作和打开操作。
53.全开解除杆22以能够相对于轴21独立地转动的方式可转动地由轴21支承于底板20的朝向车内的面侧,该全开解除杆22被弹簧29向图4中顺时针方向施力而保持在图4所示的初始位置,并且根据致动器26中的输出杆266的向锁紧解除方向的动作,从初始位置向锁紧解除方向(在图4中为逆时针方向)转动规定角度。
54.全开解除杆22具有:第1臂部221,在致动器26驱动而使输出杆266向锁紧解除方向动作时,输出杆266能够从上方与该第1臂部221抵接;第2臂部222,其连结有鲍登线等第1操作力传递构件30的上端部,该鲍登线等第1操作力传递构件30的下端部与全开锁紧单元18的未图示的棘轮连结;第3臂部223,其能够将伴随着输出杆266的向锁紧解除方向的动作的全开解除杆22的向锁紧解除方向的动作向关闭解除杆23传递;以及解除部224,其能够通过伴随着输出杆266的向锁紧解除方向的动作的全开解除杆22的向锁紧解除方向的动作,解除处于后述的卡合位置的保持构件25和后述的被卡合部201a之间的卡合关系。
55.根据上述结构,致动器26的输出杆266向锁紧解除方向进行动作,由此,全开解除杆22从图4所示的初始位置向逆时针方向(锁紧解除方向)进行动作。然后,全开解除杆22的向锁紧解除方向的动作经由第1操作力传递构件30向全开锁紧单元18的棘轮传递,并经由第3臂部223向关闭解除杆23传递。
56.关闭解除杆23以能够相对于轴21和全开解除杆22独立地转动的方式可转动地由轴21支承于底板20的朝向车内的面侧,该关闭解除杆23被弹簧31向图4中顺时针方向施力而保持在图4所示的初始位置,并且如上所述与全开解除杆22的向锁紧解除方向的动作连动而从初始位置(图4所示的位置)向图4中逆时针方向(锁紧解除方向)进行动作。
57.在关闭解除杆23连结有鲍登线等第2操作力传递构件32的前端部,该鲍登线等第2操作力传递构件32的后端部与关闭锁紧单元17的棘轮174连结。由此,关闭解除杆23的向锁紧解除方向的动作经由第2操作力传递构件32向关闭锁紧单元17的棘轮174传递,使棘轮174进行锁紧解除动作。而且,在关闭解除杆23设有弯折形成为能够与全开解除杆22的第3臂部223抵接的抵接部231,以便在全开解除杆22向锁紧解除方向进行动作时,能够与全开解除杆22连动。
58.应急杆24在底板20的朝向车外的面侧和致动器26之间,以能够与应急手柄27一体转动的方式可转动地由轴21支承于底板20,并且被弹簧33向图8中顺时针方向施力而保持
在图8所示的初始位置,通过应急手柄27的手动操作从初始位置向锁紧解除方向(在图8中为逆时针方向)转动规定角度。另外,应急杆24不会因致动器26的驱动而向锁紧解除方向进行动作。
59.应急杆24的手动操作不会向全开解除杆22即全开锁紧单元18的棘轮传递,仅向关闭解除杆23即关闭锁紧单元17的棘轮174传递。应急杆24对关闭解除杆23的操作通过在应急杆24的上部设置的上臂部241从图8中逆时针方向抵接于关闭解除杆23的抵接部231来进行传递。
60.在应急杆24的下部设有能够将应急杆24保持在图10所示的锁紧解除位置的保持构件25。由此,若通过应急手柄27的手动操作而使应急杆24向锁紧解除方向进行动作,则应急杆24被保持构件25保持在锁紧解除位置,与此相伴,关闭解除杆23也被保持在锁紧解除位置。此外,若关闭解除杆23被保持在锁紧解除位置,则关闭锁紧单元17被保持为非锁紧状态。因而,在应急杆24被保持在锁紧解除位置的状态下,由于棘轮174无法与闩173的卡合爪部173a卡合,因此,即使后滑动门4关闭也不会保持在关闭位置。
61.如图6所示,保持构件25由朝向上下方向的轴部251能够转动规定角度地支承于在应急杆24的下部设置的上下的支承片242、242,被弹簧34例如向图12中顺时针方向施力,并且在前部具有山形状的凸部252和具有台阶的卡合台阶部253。
62.凸部252位于保持构件25的前部,且设为朝向底板20的朝向车外侧的面突出,在应急杆24位于初始位置和锁紧解除位置跟前之间的范围时,如图12、图13所示,以不阻碍应急杆24的动作的方式与底板20的朝向车外侧的面接触,此外,在应急杆24移动到锁紧解除位置的情况下,如图14所示,在弹簧34的作用力的作用下突入设于底板20的开口部201。由此,保持构件25由于凸部252突入开口部201而成为卡合状态,在凸部252的前侧设置的卡合台阶部253与开口部201的缘即被卡合部201a卡合,将应急杆24保持在锁紧解除位置。
63.保持构件25和被卡合部201a之间的卡合关系通过基于致动器26的驱动的全开解除杆22的向锁紧解除方向的动作来解除。具体地说,在保持构件25处于卡合状态时,若基于致动器26的驱动而全开解除杆22向锁紧解除方向进行动作,则如图11、图15所示,通过全开解除杆22的解除部224与保持构件25的凸部252抵接,使保持构件25从图15中双点划线所示的卡合位置向实线所示的解除位置压入。由此,保持构件25的卡合台阶部253从底板20中的开口部201的被卡合部201a脱离,能够使应急杆24和关闭解除杆23返回至初始位置。然后,若应急杆24和关闭解除杆23在弹簧33、31的作用力的作用下返回至各自的初始位置,则与此相伴,关闭锁紧单元17的棘轮174成为能够与闩173的卡合爪部173a卡合的状态。因而,在该状态下,若关闭后滑动门4,则通过关闭撞针16与闩173啮合,并且棘轮174与闩173的卡合爪部173a卡合,从而使后滑动门4保持在关闭位置。
64.应急手柄27位于后滑动门4的内部,且以能够与应急杆24一体转动的方式固定于轴21的朝向车内侧的端部。而且,应急手柄27的操作部(使用者能够把持的部分)271设置为与在后滑动门4的门饰板41(参照图7)设置的开口部41a相面对。门饰板41的开口部41a在通常情况下被盖42(参照图7)遮盖,以使应急手柄27不暴露在车内侧。由此,应急手柄27在通常情况下被盖42遮盖,因此,不能操作,但在电力系统发生故障而不能驱动致动器26且无法通过电气动作打开后滑动门4等紧急情况发生的情况下,通过拆卸盖42使应急手柄27的操作部271暴露在车内侧,从而能够进行应急手柄27的手动操作。
65.在能够进行应急手柄27的手动操作的状态下,通过将使用者的手指插入门饰板41的开口部41a,对应急手柄27的操作部271进行手动操作,从而能够借助应急杆24使关闭解除杆23向锁紧解除方向进行动作。由此,即使在电力系统发生故障且后滑动门4被保持在关闭位置的状态下,也能够基于应急手柄27的手动操作,打开后滑动门4。
66.而且,在应急手柄27伴随着自身的手动操作而使应急杆24保持在锁紧解除位置的状态下,如图10所示,操作部271自开口部41a脱离而隐藏在门饰板41的里侧。由此,在应急手柄27被保持在通过手动操作而移动的操作位置的状态下,在使应急手柄27从操作位置返回至通常情况(初始位置)的时候,需要向图10中顺时针方向进行操作,但由于在应急手柄27和开口部41a之间不存在供手指插入的间隙,因此,能够防止应急手柄27被使用者从操作位置向初始位置移动这样的误操作。
67.防护板28位于与门饰板41的开口部41a相面对的位置,且以位于操作中继单元19的底板20和应急手柄27之间的间隙的位置的方式固定于底板20,从而将操作中继单元19和开口部41a之间隔断。由此,在对应急手柄27进行手动操作时,由于使用者的手指不会错误地与操作中继单元19的各种动作构件接触,因此,能够防止操作中继单元19的误动作。
68.接着,基于图8~图15,对本实施方式的车辆用门的操作装置1的作用进行说明。
69.(基于通常情况的电气动作的门打开操作和门关闭操作)
70.在后滑动门4保持在关闭位置的情况下,关闭锁紧单元17与关闭撞针16啮合而处于锁紧状态,全开锁紧单元18不与全开撞针啮合。此外,在使后滑动门4保持在全开位置的情况下,全开锁紧单元18与全开撞针啮合而处于锁紧状态,关闭锁紧单元17不与关闭撞针16啮合。此外,如图8所示,即使在后滑动门4位于关闭位置和全开位置中任一者的情况下,操作中继单元19的所有的动作构件也都处于初始位置。
71.在将后滑动门4从关闭位置打开的情况下,能够操作使用者携带的操作开关或设于后滑动门4的操作开关。若操作任意操作开关,则致动器26的马达262驱动,该驱动借助减速齿轮263、264、265向输出杆266传递。由此,输出杆266从图8所示的初始位置向逆时针方向转动,如图9所示那样向锁紧解除方向进行动作。
72.输出杆266的向锁紧解除方向的动作通过使输出杆266与全开解除杆22的第1臂部221抵接,从而向全开解除杆22传递。由此,全开解除杆22克服弹簧29的作用力从图8所示的初始位置向图9所示的锁紧解除位置进行动作。全开解除杆22的向锁紧解除方向的动作通过使第3臂部223与关闭解除杆23的抵接部231抵接而向关闭解除杆23传递。由此,关闭解除杆23从初始位置向锁紧解除方向进行动作。
73.全开解除杆22和关闭解除杆23的向锁紧解除方向的动作分别经由第1操作力传递构件30和第2操作力传递构件32向全开锁紧单元18和关闭锁紧单元17传递。由此,全开锁紧单元18和关闭锁紧单元17分别成为非锁紧状态。因而,在后滑动门4被保持在关闭位置的情况下,由于关闭锁紧单元17成为非锁紧状态而能够打开后滑动门4,此外,在后滑动门4被保持全开位置的情况下,由于全开锁紧单元18成为非锁紧状态而能够关闭后滑动门4。
74.(电力系统发生故障的情况)
75.若电力系统发生故障,则致动器26不能驱动。因而,即使对使用者携带的操作开关或设于后滑动门4的操作开关进行操作,在后滑动门4被保持在关闭位置的情况下,也无法打开后滑动门4。
76.但是,在本实施方式中,即使在致动器26不能驱动的情况下,通过从车内对应急手柄27进行手动操作,也能够打开后滑动门4。
77.在对应急手柄27进行手动操作的情况下,拆卸在后滑动门4的门饰板41安装的盖42,使应急手柄27的操作部271暴露。然后,乘坐在车内的使用者将手插入门饰板41的开口部41a,将应急手柄27从图8所示的初始位置向逆时针方向进行操作而如图10所示那样进行动作。应急手柄27的操作经由轴21、应急杆24、关闭解除杆23以及第2操作力传递构件32向关闭锁紧单元17的棘轮174传递。由此,通过棘轮174进行锁紧解除动作,从而能够打开后滑动门4。
78.此外,伴随着应急手柄27的操作,应急杆24从初始位置向锁紧解除位置进行动作。由此,如图12所示,保持构件25从凸部252与底板20的面接触的位置向后方移动,如图14所示,在弹簧34的作用力的作用下转动,成为凸部252突入开口部201的卡合状态。
79.若应急杆24位移到卡合状态,则通过卡合台阶部253与底板20的开口部201的被卡合部201a卡合,从而阻止应急杆24向初始位置返回,将应急杆24保持在锁紧解除位置。
80.若应急杆24被保持在锁紧解除位置,则应急手柄27和关闭解除杆23也被保持在锁紧解除位置,进而,关闭锁紧单元17被保持为非锁紧状态。
81.若关闭锁紧单元17被保持在非锁紧状态,则由于棘轮174不能与闩173卡合,因此,即使关闭后滑动门4,关闭锁紧单元17也不会成为锁紧状态。因而,尽管通过应急手柄27的手动操作打开了后滑动门4,但之后即使错误地关闭后滑动门4也不会被保持在关闭位置。
82.如上所述,在电力系统发生故障而致动器26不能驱动且无法通过电驱动打开后滑动门4的情况下,能够基于应急手柄27的手动操作打开后滑动门4,此外,在通过应急手柄27的手动操作而打开后滑动门4之后,由于关闭锁紧单元17不成为锁紧状态,因此,不会错误地关闭特意打开的滑动门4。
83.为了使之后的车辆输送至修理工厂和修理变得容易,使由应急手柄27的手动操作打开的后滑动门4移动至全开位置,使全开锁紧单元18成为锁紧状态,从而保持在全开位置。此外,在后滑动门4被保持在全开位置的状态下,也能够进行在前滑动门3设置的应急手柄9的操作,所以也能够根据需要,基于应急手柄9的操作,打开前滑动门3。
84.另外,在应急手柄27被保持在锁紧解除位置的状态下,使应急手柄27的操作部271的一部分自门饰板41的开口部41a脱离并隐藏在门饰板41的里侧。由此,能够防止被保持在锁紧解除位置的应急手柄27返回到初始位置这样的误操作。
85.在修理结束且致动器26能够驱动的情况下,驱动致动器26,使全开解除杆22向锁紧解除方向进行动作。若全开解除杆22向锁紧解除方向进行动作,则如图11、图15所示,全开解除杆22的解除部224搭上保持构件25的凸部252,将保持构件25从图15所示的双点划线所示的位置向实线所示的位置压入。由此,通过使保持构件25的卡合台阶部253从底板20的开口部201的被卡合部201a脱离,从而使应急杆24在弹簧33的作用力的作用下返回至初始位置。此外,与此相伴,应急手柄27、关闭解除杆23也返回至各自的初始位置。进而,关闭锁紧单元17的棘轮174也返回至卡合位置,使关闭锁紧单元17成为能够与关闭撞针16啮合的状态。
86.以上对本发明的一实施方式进行了说明,但在不脱离本发明的主旨的范围内,能够对上述实施方式施加以下这样的各种变形、变更以及组合。
87.(1)将车辆用门的操作装置1应用于摆动式的门。
88.(2)将保持构件25支承于底板20,将被卡合部201a设于应急杆24。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。