1.本发明属于目标检测定位领域,涉及一种基于单站测距的偏差减小多维标度分析定位方法。
背景技术:
2.单站测距是根据距离信息来估计目标的位置信息,通过测量观测站与目标之间的距离信息来解算目标的位置信息。目前单站测距的定位方法主要分为两类,一类是非解析解目标定位方法,此类方法得到的目标位置是一个非解析解,一般都是通过迭代求解,此类方法定位精度高,但是在迭代的过程中如果初值设置不好,容易导致解陷入局部最优解,甚至会导致迭代发散等问题,且由于此类方法都是通过迭代求解得到,导致方法复杂度相对较高;另一种方法的到目标位置是一个解析解,此类方法是通过分析观测站与目标之间的几何关系,将它们之间的非线性关系转化为线性关系式,所以此类方法也叫伪线性求解方法,通过解算伪线性表达式以得到目标的位置信息。此类方法复杂度低,且是解析解,但是在线性化的过程中导致了定位精度的损失,无论如何优化都无法到达克拉美罗下界。
技术实现要素:
3.本发明针对现有技术的不足,提出了一种基于单站测距的偏差减小多维标度分析定位方法。
4.一种基于单站测距的偏差减小多维标度分析定位方法,其步骤如下:
5.该方法具体包括以下步骤:
6.步骤一:定义第m时刻观测站与目标之间的距离信息;
7.步骤二:定义坐标矩阵如下:
[0008][0009]
其中1m表示一个全为1的m
×
1维的向量,p=[p
x
,py]
t
表示目标的位置信息,s表示m个时刻观测站的坐标集合矩阵:
[0010]
s=[s1,s2,...,sm]
t
[0011]
sm=[s
m,x
,s
m,y
]
t
表示第m个时刻观测站的位置信息,m=1,2,...,m;
[0012]
定义的标量积矩阵v=xx
t
,矩阵v是一个秩为2的一个正定矩阵,矩阵v中各个元素表示为:
[0013][0014]
其中dm与dn表示目标与第m与n个时刻观测站之间的距离,d
mn
表示第n个时刻观测站与第m个时刻观测站之间的距离,表示为:
[0015][0016]
其中m,n=1,2,...,m。
[0017]
定义了多维相似伪线性模型:
[0018]
cz=0m[0019]
其中c=va,[]
表示矩阵的伪逆表达,z=[1,p
x
,py]
t
,0m表示一个元素全为零的m
×
1维向量。
[0020]
步骤三:在实际情况当中由于测量值是有偏的,那么导致多维相似伪线性模型也是有偏的,即:
[0021][0022]
其中矩阵表示包含测量噪声的标量积矩阵,对标量积矩阵进行泰勒展开并忽略噪声高阶项得到:
[0023][0024]
其中矩阵
△
v为标量积矩阵噪声分量的补偿矩阵,矩阵vo表示不含噪声的标量矩阵,其中矩阵
△
v表达式如下所示:
[0025][0026]
即:
[0027][0028]
即:
[0029][0030]
其中表示第m个时刻不含噪声的无偏测量值,qm表示测量误差;
[0031]
步骤四:建立优化函数表达式,如下所示:
[0032][0033]
其中:
[0034]
[0035][0036][0037]
表示包含测量噪声c矩阵,其中a
m1
表示a矩阵第m行第1列的元素,dm表示第m个时刻观测站与目标之间的距离,其中m=1,2,...,m。
[0038]
将多维相似伪线性模型的目标定位问题转化为一个约束总体最小二乘问题,但是在复数域内,该有约束的问题已经被转换成了一个无约束优化问题。但是目标定位问题中的变量均为实数,而在实数域内,得到如下无约束优化表达式:
[0039][0040]
其中w
p
=g1 p
x
g2 pyg3。
[0041]
步骤五:利用最小二乘目标估计方法对多维相似伪线性模型进行解算,求解
[0042]
目标的位置信息:
[0043][0044]
其中p
ls
表示多维相似伪线性最小二乘方法下目标估计值,a1表示矩阵a的第一列,a2表示矩阵a的后两列,表示含有测量噪声的标量积矩阵。
[0045]
步骤六:建立牛顿迭代算法的迭代公式,将多维相似伪线性最小二乘方法
[0046]
下目标估计值设为牛顿迭代算法的初值:
[0047][0048]
其中pn表示牛顿迭代中n次的目标位置信息;梯度向量海森矩阵
[0049]
其中其中
[0050]
步骤七:将牛顿算法进行多次迭代,输出目标位置信息。
[0051]
作为优选,所述的定义第m时刻观测站与目标之间的距离信息,其表达式如
[0052]
下:
[0053][0054]
但是在实际情况当中,测量是含有噪声的,那么上式为:
[0055][0056]
表示第m个时刻实际测量值,其中测量噪声协方差矩阵为:
[0057][0058]
上式q表示一个对角元素全为σ2的m
×
m维的对角矩阵,q表示噪声向量。
[0059]
作为优选,步骤七中迭代的次数为5-8次。
[0060]
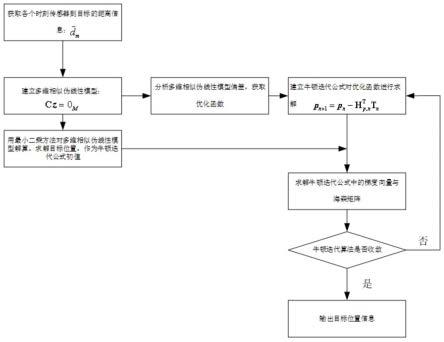
为了解决单站测距目标定位问题,提出了一种基于单站测距的偏差减小多维标度分析定位方法。该方法首先根据测量值中观测站与目标之间的几何关系,建立了多维相似伪线性模型;接着设置优化函数,最后通过牛顿迭代算法进行求解。
[0061]
本发明相对现有的技术具有的效果:本发明与现有的单站目标定位方法,其复杂度低且定位精度高。
附图说明
[0062]
图1为传感器与目标的网络示意图;
[0063]
图2为本发明的流程图;
[0064]
图3为仿真中传感器的运动轨迹与目标的位置;
[0065]
图4为目标定位的均方根误差(rmse)随着信号噪声改变下各个单站定位方法的比较图;
[0066]
图5为目标定位的偏差(bias)随着测量噪声改变下各个单站定位方法的比较图。
具体实施方式
[0067]
下面结合具体实施例对本发明做进一步的分析。
[0068]
如图2所示,一种基于单站测距的偏差减小多维标度分析定位方法。该方法首先根据测量值中观测站与目标之间的几何关系,建立了多维相似伪线性模型;接着设置优化函数,最后通过牛顿迭代算法进行求解。
[0069]
stap1:如图1所示,定义第m时刻观测站与目标之间的距离信息,其表达式如下:
[0070][0071]
其中m=1,2,...,m,dm表示第m个时刻观测站与目标之间的距离,sm=[s
m,x
,s
m,y
]
t
表示第m个时刻观测站的位置信息,p=[p
x
,py]
t
表示目标的位置信息。
[0072]
但是在实际情况当中,测量是含有噪声的,那么上式为:
[0073][0074]
其中表示第m个时刻不含噪声的无偏测量值,表示第m个时刻实际测量值,qm表示测量误差,其中测量噪声协方差矩阵为:
[0075]
q=e(qq
t
)=diag(σ2,σ2,...,σ2)
ꢀꢀꢀ
(2)
[0076]
上式q表示一个对角元素全为σ2的m
×
m维的对角矩阵,q表示噪声向量。
[0077]
stap2:定义坐标矩阵如下:
[0078][0079]
其中1m表示一个全为1的m
×
1维的向量,s表示m个时刻观测站的坐标集合矩阵:
[0080]
s=[s1,s2,...,sm]
t
[0081]
定义的标量积矩阵v=xx
t
,不难发现矩阵v是一个秩为2的一个正定矩阵,矩阵v中各个元素可以表示为:
[0082][0083]
其中dm与dn表示目标与第m与n个时刻观测站之间的距离,d
mn
表示第n个时刻观测站与第m个时刻观测站之间的距离,表示为:
[0084][0085]
其中m,n=1,2,...,m。
[0086]
定义了多维相似伪线性模型:
[0087]
cz=0m[0088]
其中c=va,[]
表示矩阵的伪逆表达,z=[1,p
x
,py]
t
,0m表示一个元素全为零的m
×
1维向量。
[0089]
stap3:在实际情况当中由于测量值是有偏的,那么导致多维相似伪线性模型也是有偏的,即:
[0090][0091]
其中矩阵表示包含测量噪声的标量积矩阵,对标量积矩阵进行泰勒展开并忽略噪声高阶项可以得到:
[0092][0093]
其中矩阵
△
v为标量积矩阵噪声分量的补偿矩阵,矩阵vo表示不含噪声的标量矩阵,其中矩阵
△
v表达式如下所示:
[0094][0095]
即:
[0096]
不难发现:
[0097][0098]
即:
[0099][0100]
stap4:建立优化函数表达式,如下所示:
[0101][0102]
其中:
[0103][0104][0105][0106]
表示包含测量噪声c矩阵。
[0107]
将多维相似伪线性模型的目标定位问题转化为一个约束总体最小二乘问题,但是在复数域内,该有约束的问题已经被转换成了一个无约束优化问题。但是目标定位问题中的变量均为实数,而在实数域内,我也可以得到如下无约束优化表达式:
[0108][0109]
其中w
p
=g1 p
x
g2 pyg3。
[0110]
stap5:利用最小二乘目标估计方法对多维相似伪线性模型进行解算,求解目标的位置信息:
[0111]
[0112]
其中p
ls
表示多维相似伪线性最小二乘方法下目标估计值,a1表示矩阵a的第一列,a2表示矩阵a的后两列,表示含有测量噪声的标量积矩阵。
[0113]
stap6:建立牛顿迭代算法的迭代公式,将多维相似伪线性最小二乘方法下目标估计值设为牛顿迭代算法的初值:
[0114][0115]
其中pn表示牛顿迭代中n次的目标位置信息;梯度向量海森矩阵
[0116]
其中其中
[0117]
stap7:将牛顿算法进行5~8次迭代,输出目标位置信息。
[0118]
如图3所示,传感器运动轨迹与目标位置仿真示意图;如图4所示:为目标定位的均方根误差(rmse)随着信号噪声改变下各个单站定位方法的比较图(蒙特卡洛5000次):
[0119]
下式为rmse表达式:
[0120][0121]
其中l表示仿真次数,表示第l(l=1,2,
…
,l)次对目标定位所得到的估计结果。
[0122]
如图4所示,克拉美罗下界分析(cramer-rao lower bound,crlb),为目标在本特征下的无偏估量的方差确定的一个下限,其计算表达式如下:
[0123][0124]
其中费歇尔信息矩阵其中费歇尔信息矩阵
[0125]
如图5所示:图5为目标定位的偏差(bias)随着测量噪声改变下各个单站定位方法的比较图(蒙特卡洛5000次):
[0126]
下式为bias表达式:
[0127][0128]
其中l表示仿真次数,表示第l(l=1,2,
…
,l)次对目标定位所得到的估计结果
[0129]
本发明提出了基于单站测距的偏差减小多维标度分析定位方法多维相似伪线性
约束总体最小二乘估计(multidimensional scaling constrained total least squares,mds-ctls)与校准约束加权最小二乘估计(constrained weighted least squares calibration,cwlsc)、多维相似伪线性加权最小二乘估计(multidimensional scaling weighted least squares,mds-wls)、多维相似伪线性总体最小二乘估计(multidimensional scaling total least squares,mds-tls)
[0130]
本发明与进行比较:
[0131] mds-ctlsmds-wlsmds-tlscwlsc测距精度高低低高实现复杂度低低低高
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。