1.本公开涉及控制系统。
背景技术:
2.以往,已知有机床与机器人协调地进行作业的系统(例如,参照专利文献1、2。)。
3.另外,作为在示教时等手动操作机器人的操作装置,已知有旋转刻度盘式的操作装置(例如,参照专利文献1、3)。在专利文献1中公开了产生与刻度盘的旋转量对应的数量的脉冲,并使装载机移动与脉冲的数量对应的移动量。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2013-222381号公报
7.专利文献2:日本特开2001-154717号公报
8.专利文献3:日本特许第5871373号公报
技术实现要素:
9.发明要解决的问题
10.在机床与机器人协调地进行作业的系统中,通常进行机床及机器人两者的示教。当机床和机器人使用不同使用方法的不同操作装置进行手动操作时,操作者需要学习两种操作装置的使用方法。因此,希望能够使用同一操作装置对机床和机器人这两者进行操作。
11.用于解决问题的方案
12.本公开的一方面是一种控制系统,其具备:手动操作装置,其具有由操作者旋转的刻度盘,并产生与该刻度盘的旋转对应的操作信号;机床控制装置,其基于所述操作信号控制机床;机器人控制装置,其与该机床控制装置可通信地连接,且基于所述操作信号控制机器人;以及操作对象设定部,其将所述手动操作装置的操作对象择一地设定为所述机床以及所述机器人,所述手动操作装置与所述机床控制装置以及所述机器人控制装置中的一方连接,且将所述操作信号输入到所述一方,当通过所述操作对象设定部将所述操作对象设定为所述机床控制装置及所述机器人控制装置中的另一方的控制对象时,所述机床控制装置及所述机器人控制装置中的所述一方将所述操作信号或基于该操作信号的信号发送到所述另一方。
附图说明
13.图1是具备机床、机器人以及控制系统的系统的整体构成图。
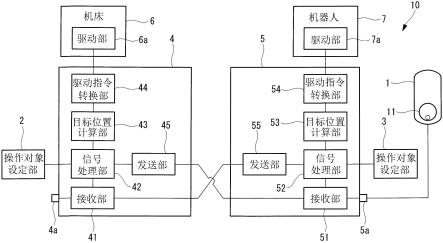
14.图2是一个使用例中的控制系统的框图。
15.图3是手动操作装置的主视图。
16.图4是手动操作装置的后视图。
17.图5是控制系统的变形例的框图。
18.图6是另一个使用例中的控制系统的框图。
19.图7是控制系统的其他变形例的框图。
具体实施方式
20.以下,参照附图对一个实施方式的控制系统10进行说明。
21.如图1所示,控制系统10控制相互协调地进行动作的机床6以及机器人7。
22.机床6通过驱动部6a(参照图2)的工作来加工工件。驱动部6a例如是使工具旋转的旋转电机以及使工具与工件相对移动的进给电机。机器人7是配置在机床6的外部,且通过驱动部7a(参照图2)的工作进行作业的垂直多关节机器人,例如,向机床6供应工件,且从机床6取出工件。驱动部7a例如是设置于各关节的伺服电机。机器人7也可以是垂直多关节机器人以外的种类的机器人。
23.如图1和图2所示,控制系统10具备便携式手动操作装置1、设定手动操作装置1的操作对象的操作对象设定部2、3、控制机床6的机床控制装置4、以及控制机器人7的机器人控制装置5。
24.两个控制装置4、5相互可通信地连接。例如,两个控制装置4、5通过诸如ethernet(注册商标)的通信网络相互连接,并且通过使用诸如fl-net的通信协议相互收发信号。
25.手动操作装置1是用于经由控制装置4、5对作为操作对象的机床6或机器人7进行手动操作的旋转刻度盘式手动脉冲产生装置。控制装置4、5分别具有手动操作装置1用的连接器4a、5a,手动操作装置1与两个控制装置4、5中的任一个连接。
26.如图3及图4所示,手动操作装置1具备:被操作者的手握持的壳体1a、以及将壳体1a与连接器4a或5a连接的电缆1b。另外,手动操作装置1具备脉冲手柄11、轴选择开关12、倍率选择开关13、使能开关14、以及紧急停止开关15,手柄11和开关12、13、14、15设置在壳体1a上。
27.脉冲手柄11是能够向两个方向旋转且由操作者进行旋转操作的旋转刻度盘,与设置在壳体1a内的脉冲产生部(省略图示)连接。脉冲产生部根据脉冲手柄11的旋转量和旋转方向产生脉冲,旋转量越大,产生的脉冲的数量越多。根据脉冲来控制机床6或机器人7的规定操作部位的动作,通过脉冲手柄11的旋转量、旋转速度及旋转方向分别指定操作部位的动作量、动作速度及动作方向。机床6的操作部位例如是保持于主轴的工具的前端,机器人7的操作部位例如是与臂的前端连接的工具的前端。
28.轴选择开关12在多个轴之间切换用于使操作部位动作的轴。在一个例子中,轴能够在三个相互正交的直动轴和三个旋转轴共六个轴之间进行切换。操作部位在沿着所选择的直动轴的方向上移动,或者绕所选择的旋转轴旋转。
29.倍率选择开关13是切换每一脉冲的操作部位的动作量的倍率的开关。在一个例子中,倍率能够在off(即,0倍)、1倍、10倍、100倍和1000倍之间进行切换。通过脉冲手柄11的旋转所产生的脉冲以由倍率选择开关13设定的倍率倍增。因此,倍率越大,脉冲手柄11的每单位旋转量的操作部位的动作量越大。当倍率设定为off时,无论脉冲手柄11的旋转操作如何都不能操作操作对象。
30.使能开关14是用于切换手动操作装置1对操作对象的操作的有效和无效的开关。使能开关14是诸如3位置开关之类的按钮式开关,并设置在由握持壳体1a的手按下的位置。
只有在按下使能开关14时,由手动操作装置1对操作对象的操作才有效。
31.当该紧急停止开关15被操作时,紧急停止开关15产生用于使操作对象停止的紧急停止信号。紧急停止信号被发送到控制操作对象的机床控制装置4或者机器人控制装置5,机床控制装置4或者机器人控制装置5响应紧急停止信号而使操作对象的动作停止。
32.手动操作装置1产生操作信号,并且将操作信号输入与手动操作装置1连接的控制装置4或者5,该操作信号包括通过脉冲手柄11的旋转而产生的脉冲、以及指示开关12、13、14、15的状态的信号,。
33.操作对象设定部2、3由操作者操作,并按照操作者的操作,将手动操作装置1的操作对象择一地设定为机床6以及机器人7。例如,操作对象设定部2、3是显示于控制装置4、5的操作盘的设定屏幕的触摸按钮、或设置在操作盘上的硬件键。在机器人控制装置5具备与控制装置主体5b连接的便携式操作盘5c的情况下,操作对象设定部3也可以设置于操作盘5c。
34.操作对象设定部2、3是与控制装置4、5连接的外部装置,例如可编程控制器(plc:programmable logic controller)或者切换开关,可以从外部装置向控制装置4、5外部输入指示所设定的操作对象的信号
35.通过两个操作对象设定部2、3中的任一个来设定操作对象,不能通过两个操作对象设定部2、3同时设定操作对象。例如,在手动操作装置1与机床控制装置4连接时,只有机床控制装置4侧的操作对象设定部2发挥作用,在手动操作装置1与机器人控制装置5连接时,只有机器人控制装置5侧的操作对象设定部3发挥作用。另外,在操作脉冲手柄11的过程中,不能通过操作对象设定部2、3来变更操作对象。
36.如图2所示,机床控制装置4具备接收部41、信号处理部42、目标位置计算部43、驱动指令转换部44以及发送部45。机床控制装置4具备处理器以及存储装置,信号处理部42、目标位置计算部43以及驱动指令转换部44通过处理器来实现。
37.接收部41与连接器4a连接,且经由连接器4a从手动操作装置1接收操作信号。
38.信号处理部42与操作对象设定部2、接收部41以及发送部45相连接。信号处理部42根据由操作对象设定部2设定的操作对象,将经由连接器4a从手动操作装置1接收到的操作信号传送到目标位置计算部43以及发送部45中的任一个。具体而言,信号处理部42在操作对象设定为机床6时,将操作信号传送到目标位置计算部43,在操作对象设定为机器人7时,将操作信号传送到发送部45。发送部45通过通信网络与机器人控制装置5的接收部51连接,并按照固定周期将所传送的操作信号发送至接收部51。
39.另外,信号处理部42将经由接收部41从机器人控制装置5接收到的操作信号传送到目标位置计算部43。
40.目标位置计算部43基于操作信号来计算机床6的操作部位的目标位置。具体而言,针对每个轴预先设定了机床6的操作部位的每一脉冲的动作量。目标位置计算部43按规定时间间隔对由脉冲产生部产生的脉冲数进行采样,并将所采样的脉冲数乘以由倍率选择开关13设置的倍率,来计算脉冲数。目标位置计算部43计算使操作部位从当前位置沿着由轴选择开关12选择的直动轴或绕由轴选择开关12选择的旋转轴动作与计算出的脉冲数对应的动作量时的目标位置。
41.驱动指令转换部44基于由目标位置计算部43计算出的目标位置,计算用于通过驱
动部6a使操作部位向目标位置动作的驱动指令信号,并将驱动指令信号发送到驱动部6a。驱动部6a按照驱动指令信号进行动作,使得操作部位沿着所选择的直动轴或者绕所选择的旋转轴,按照脉冲手柄11的旋转量和旋转方向,向目标位置动作。
42.机器人控制装置5具备接收部51、信号处理部52、目标位置计算部53、驱动指令转换部54以及发送部55。机器人控制装置5具备处理器及存储器,信号处理部52、目标位置计算部53以及驱动指令变换部54通过处理器来实现。
43.接收部51与连接器5a连接,经由连接器5a从手动操作装置1接收操作信号。
44.信号处理部52与操作对象设定部3、接收部51、以及发送部55连接。信号处理部52根据由操作对象设定部3设定的操作对象,将经由连接器5a从手动操作装置1接收到的操作信号传送到目标位置计算部53和发送部55中的任一个。具体而言,信号处理部52在操作对象被设定为机器人7时,将操作信号传送至目标位置计算部53,当操作对象被设定为机床6时,将操作信号传送至发送部55。发送部55通过通信网络与机床控制装置4的接收部41连接,并将传送的操作信号按照固定周期发送到接收部41。
45.另外,信号处理部52将经由接收部51从机床控制装置4接收到的操作信号传送到目标位置计算部53。
46.目标位置计算部53基于操作信号,计算机器人7的操作部位的目标位置。具体而言,针对每个轴,预先设定了机器人7的操作部位的每一脉冲的动作量。目标位置计算部53以规定时间间隔采样由脉冲产生部产生的脉冲的数目,并通过将所采样的脉冲数乘以由倍率选择开关13设定的倍率来计算脉冲数。目标位置计算部53计算使操作部位从当前位置沿着由轴选择开关12选择的直动轴或者绕由轴选择开关12选择的旋转轴动作与所计算出的脉冲数对应的动作量时的目标位置。
47.驱动指令转换部54基于由目标位置计算部53计算出的目标位置,计算用于通过驱动部7a使操作部位向目标位置动作的驱动指令信号,并将驱动指令信号发送给驱动部7a。驱动部7a按照驱动指令信号进行动作,使得操作部位沿着所选择的直动轴或者绕所选择的旋转轴,按照脉冲手柄11的旋转量和旋转方向,向目标位置动作。
48.接下来,对控制系统10的作用进行说明。
49.操作者通过将电缆1b连接到连接器5a,从而将手动操作装置1连接到机器人控制装置5。
50.在想手动对机器人7进行点动(jog)操作时,操作者通过操作操作对象设定部3,将操作对象设定为机器人7,通过开关12、13的操作选择所希望的倍率及所希望的轴,并用握持壳体1a的手按下使能开关14。指示所选择的操作对象、倍率以及轴和使能开关14的按下的操作信号从手动操作装置1被发送到机器人控制装置5。
51.接着,操作者使脉冲手柄11向所希望的方向旋转所希望的旋转量。包含通过脉冲手柄11的旋转而产生的脉冲的操作信号从手动操作装置1发送到机器人控制装置5。
52.在机器人控制装置5中,操作信号从接收部51被输入至信号处理部52。由于操作对象被设定为作为机器人控制装置5的控制对象的机器人7,因此,操作信号从信号处理部52被传送至目标位置计算部53。然后,在目标位置计算部53中,基于操作信号计算机器人7的操作部位的目标位置,在驱动指令转换部54中,计算用于使机器人7的操作部位向目标位置动作的驱动指令信号。驱动指令信号从机器人控制装置5发送到机器人7的驱动部7a。驱动
部7a按照驱动指令信号工作,机器人7的操作部位在沿着所选择的直动轴的方向上移动至目标位置,或者绕所选择的旋转轴旋转至目标位置。
53.在想手动对机床6进行点动操作时,操作者通过操作操作对象设定部3将操作对象设定为机床6。接下来,与机器人7的点动操作时同样,操作者通过操作开关12、13选择所希望的倍率和所希望的轴,并按下使能开关14,使脉冲手柄11向所希望的方向旋转所希望的旋转量。指示所选择的操作对象、倍率以及轴和使能开关14的按下的操作信号从手动操作装置1被发送至机器人控制装置5,并且,包含脉冲的操作信号从手动操作装置1被发送至机器人控制装置5。
54.在机器人控制装置5中,操作信号从接收部51被输入至信号处理部52。由于操作对象被设置为作为机床控制装置4的控制对象的机床6,所以操作信号从信号处理部52传送至发送部55,并从发送部55发送至机床控制装置4。在机床控制装置4中,操作信号从接收部41经由信号处理部42被传送到目标位置计算部43。然后,在目标位置计算部43中,基于操作信号计算机床6的操作部位的目标位置,在驱动指令转换部44中,计算用于使机床6的操作部位向目标位置动作的驱动指令信号。驱动指令信号从机床控制装置4发送到机床6的驱动部6a。驱动部6a按照驱动指令信号工作,机床6的操作部位在沿着所选择的直动轴的方向上移动到目标位置,或者绕所选择的旋转轴旋转至目标位置。
55.这样,根据控制系统10,当操作对象被设定为机器人7时,与手动操作装置1连接的机器人控制装置5基于从手动操作装置1输入的操作信号控制机器人7。另外,当操作对象被设定为机床6时,与手动操作装置1连接的机器人控制装置5将从手动操作装置1输入的操作信号发送到机床控制装置4,机床控制装置4基于从机器人控制装置5接收到的操作信号,控制机床6。由此,能够使用与机器人控制装置5连接的一台手动操作装置1,对机床6及机器人7这两者进行点动操作。
56.另外,在设有机床6专用的手动操作装置和机器人7专用的手动操作装置的情况下,操作者需要学习两者的手动操作装置的使用方法。特别是,对于至今为止处理机器人7的操作者来说,重新学习机床6的操作方法是很大的负担,同样,对于至今为止处理机床6的操作者来说,重新学习机器人7的操作方法是很大的负担。根据本实施方式,操作者通过学习一种手动操作装置1的使用方法,就能够容易地掌握对机床6及机器人7这两者的点动操作的方法。
57.在本实施方式中,当操作对象被设定为机床6时,机器人控制装置5将从与机器人控制装置5连接的手动操作装置1输入的操作信号发送到机床控制装置4,但取而代之,也可以将基于目标位置的信号发送到机床控制装置4。
58.例如,机器人控制装置5可以基于操作信号来计算机床6操作部位的目标位置,并将目标位置发送到机床控制装置4。即,如图5所示,目标位置计算部43也可以设置在机器人控制装置5中。
59.在图5的构成中,当操作对象被设定为机床6时,信号处理部52将操作信号传送到目标位置计算部43,目标位置计算部43将所计算出的机床6的操作部位的目标位置的信息发送到发送部55。目标位置的信息从发送部55经由接收部41以及信号处理部42被发送到驱动指令转换部44。
60.在本实施方式中,尽管已经对手动操作装置1与机器人控制装置5连接的情况进行
了说明,但如图6所示,也可以通过将电缆1b连接到连接器4a而将手动操作装置1与机床控制器4连接。
61.在图6的使用例中,当操作对象被设定为机床6时,从手动操作装置1经由接收部41输入到信号处理部42的操作信号从信号处理部42被传送到目标位置计算部43,基于操作信号控制机床6。
62.另一方面,当操作对象被设置为机器人7时,从手动操作装置1经由接收部41输入到信号处理部42的操作信号从信号处理部42被传送到发送部45,并从发送部45发送到机器人控制装置5。并且,在机器人控制装置5中,操作信号从接收部51经由信号处理部52被传送至目标位置计算部53,基于操作信号控制机器人7。
63.在图6的构成中,当操作对象被设定为机器人7上时,机床控制装置4将从与机床控制装置4连接的手动操作装置1输入的操作信号发送到机器人控制装置5,但取而代之,也可以将基于目标位置的信号发送到机器人控制装置5。
64.例如,机床控制装置4可以基于操作信号来计算机器人7的操作部位的目标位置,并将目标位置发送到机器人控制装置5。即,如图7所示,目标位置计算部53也可以设置于机床控制装置4。
65.在图7的构成中,当操作对象设置为机器人7时,信号处理部42将操作信号传送至目标位置计算部53,目标位置计算部53将所计算出的机器人7的操作部位的目标位置信息发送至发送部45。目标位置的信息从发送部45经由接收部51以及信号处理部52被发送到驱动指令转换部54。
66.在本实施方式中,手动操作装置1能够与机床控制装置4以及机器人控制装置5连接,但而代之,也可以取将手动操作装置1仅与机床控制装置4以及机器人控制装置5中的任一方连接。
67.即,如图5所示,机床控制装置4也可以不具有连接器4a,或者如图7所示,机器人控制器5也可以不具有连接器5a。
68.在本实施方式中,紧急停止开关15也可以不仅使操作对象的动作停止,还可以使机床6以及机器人7这两者的动作停止。例如,当操作紧急停止开关15时,可以将紧急停止信号从手动操作装置1发送到两个控制器4和5。
69.在本实施方式中,操作对象设定部2、3设置于两个控制装置4、5,但取而代之,也可以仅设置于控制装置4、5中的任一个。
70.另外,在本实施方式中,操作对象设定部2、3设置在手动操作装置1的外部,但取而代之,也可以设置在手动操作装置1上。例如,操作对象设定部也可以是设置于壳体1a的硬件键。
71.在本实施方式中,在通过使能开关14将操作对象的操作切换为有效时,控制装置4、5也可以禁止不是操作对象的机床6或者机器人7的动作。
72.根据该构成,能够防止在操作者正在操作操作对象时,例如其他的操作者使不是操作对象的机床6或机器人7动作。
73.在机器人7用的便携式操作盘5c上也设置有使能开关,该使能开关用于切换由便携式操作盘5c进行的机器人7的操作的有效和无效。在操作对象设定为机床6时,机器人控制装置5也可以无论便携式操作盘5c的使能开关是否按下,都使机器人7的动作停止。
74.根据该构成,在操作者正在使用手动操作装置1操作机床6时,能够防止其他操作者利用便携式操作盘5c操作机器人7而使其动作。
75.另外,在按下使能开关14时,机器人控制装置5也可以无论便携式操作盘5c的使能开关是否按下,均禁止由便携式操作盘5c对机器人7的操作。
76.根据该构成,能够防止两个操作者分别使用手动操作装置1及便携式操作盘5c同时操作机器人7。
77.在本实施方式中,也可以设置指示部,该指示部指示机床6及机器人7中的任一个被设定为操作对象。例如,指示部是设置于壳体1a的led灯16(参照图3),根据操作对象点亮或熄灭,或者以不同的颜色发光。操作者能够基于自身手边的手动操作装置1的灯16的点亮及熄灭,或者基于灯16的发光颜色,确认当前的操作对象。
78.在本实施方式中,机床控制装置4及机器人控制装置5中的至少一个也可以具有通知部,该通知部通知由操作对象设定部2或3设定的操作对象及由轴选择开关12选择的轴。例如,通知部是机床控制装置4的操作盘4b的屏幕4c(参照图1。)以及便携式操作盘5c的屏幕5d(参照图1。),对操作对象及所选择的轴进行图形显示。
79.握持手动操作装置1的操作者及其他作业者能够基于通知部的通知来确认当前的操作对象及所选择的轴。
80.在本实施方式中,控制装置4和5中的至少一个可以具有模拟基于操作信号的操作对象的动作的功能。在该情况下,控制装置4、5在基于操作信号的操作对象的动作之前执行模拟,并在通过模拟预测到机床6和机器人7的干涉的情况下,使基于操作信号的操作对象的动作停止。由此,能够防止机床6和机器人7的干涉。
81.例如,在各控制装置4、5存储装置中存储有机床6及机器人7各自的三维模型和三维位置。与手动操作装置1连接的控制装置4或5在三维的虚拟空间中,基于存储装置中存储的三维位置配置机床6及机器人7的三维模型,并使操作对象的三维模型的操作部位在虚拟空间上向目标位置动作,判定机床6的三维模型和机器人7的三维模型是否相干涉。这些处理由控制装置4或5的处理器执行。
82.附图标记说明:
83.1:手动操作装置
84.2、3:操作对象设定部
85.4:机床控制装置
86.5:机器人控制装置
87.4c、5d:通知部
88.6:机床
89.7:机器人
90.10:控制系统
91.11:脉冲手柄(刻度盘)
92.14:使能开关
93.15:紧急停止开关
94.16:指示部
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。