1.本发明涉及一种用于确定和/或监测介质的至少一个过程变量的电子振动传感器,并且涉及一种用于操作该电子振动传感器的方法。
背景技术:
2.电子振动传感器通常用于过程和/或自动化工程中。在料位测量设备的情况下,电子振动传感器具有至少一个可机械振动单元,诸如例如振动叉、单杆或隔膜。在操作期间,驱动/接收单元激励可机械振动单元中的机械振动,该驱动/接收单元通常呈机电换能器单元的形式,该驱动/接收单元进而可以是例如压电驱动器或电磁驱动器。然而,在流量计的情况下,诸如在根据科里奥利原理操作的测量设备中,可机械振动单元也可以被设计为可振动管,相应的介质流过该可振动管。
3.申请人制造了多种多样相应的现场设备,并且在料位测量设备的情况下,这些现场设备以例如liquiphant或soliphant的名称进行分销。基本的测量原理原则上从许多出版物可知。驱动/接收单元借助于电激励信号激励可机械振动单元以引起机械振动。反过来说,驱动/接收单元可以接收可机械振动单元的机械振动并将其转换成电接收信号。因此,驱动/接收单元要么是单独的驱动单元和单独的接收单元,要么是组合的驱动/接收单元。
4.激励信号和接收信号两者都以它们的频率、幅度和/或相位为特征。因此,这些变量的变化通常相应地用于确定相应的过程变量,诸如容器中的介质的预定料位或介质的密度和/或粘度,或通过管的介质流量。例如,在用于液体的电子振动料位开关的情况下,在可振动单元是被液体覆盖还是自由振动之间进行区分。因此,例如基于不同的谐振频率(即,频率偏移)来区别自由状态和被覆盖状态这两种状态。如果可振动单元被介质覆盖,则密度和/或粘度进而只能利用这样的测量设备进行确定。
5.驱动/接收单元通常是反馈电振荡电路的一部分,借助于该反馈电振荡电路激励可机械振动单元中的机械振动。对于激励,通常通过控制电路设置可指定相位偏移值,即激励信号和接收信号之间的相位偏移的目标值。例如,谐振振动必须满足放大系数≥1和振荡电路条件,根据这些振荡电路条件,振荡电路中出现的所有相位都会导致360
°
的倍数。从现有技术中可知用于激励可机械振动单元或用于设置可指定相位偏移的各种各样的方法。在这里可以在模拟激励和数字激励之间进行基本区分,其中区别在于振荡电路和数字方法之间,所述振荡电路由必须适应于所使用的传感器类型的模拟部件构成,所述数字方法原则上是普遍适用的。
6.根据经常使用的激励原理,控制电路包括放大器和相位偏移器,借助于该放大器和该相位偏移器将接收信号反馈到发射信号,以便设置激励信号和接收信号之间的可指定相位偏移值。例如,根据de102006034105a1,使用可调节的相位偏移器。通过测量先前放大的接收信号的频率的控制单元并且至少基于所存储的数据通过放大器单元的频率-相位依赖性来控制相位偏移器。
7.从de102007013557a1中还获知一种放大器,该放大器具有可调节的放大因子,该
放大因子由控制单元设置,以使得发射信号的幅度基本上在可指定的幅度带内。
8.从de102005015547a1获知一种电子振动传感器,其中电子单元设有至少一个全通滤波器,所述至少一个全通滤波器用于设置相位偏移的目标值。全通滤波器根据频率以恒定增益改变电信号的相位。特别地是,可以以激励信号和接收信号之间的相位可调的方式控制或调节全通滤波器。根据该发明的一个实施例,在将接收信号供应给全通滤波器、由全通滤波器处理并返回之前,优选仅对接收信号进行滤波和/或放大。
9.然而,在模拟激励的情况下,用于构建振荡电路的模拟部件必须适应于所使用的传感器类型。此外,特别是相对于外部振动而言,传感器的鲁棒性取决于在每种情况下用于信号处理和/或评估的滤波器的选择性,其中所使用的滤波器确定电子单元的相位响应的节距。相位响应的节距越大,滤波器所覆盖的频率范围越窄。因此,可能存在传感器不再谐振振动的情况。
10.从de102009026685a1已经获知一种激励方法,利用该激励方法,借助于在可振动单元的工作范围内的可指定的频带内的所谓的频率扫描,以一个接一个的离散激励频率相继地激励可机械振动单元中的机械振动,并且相应的接收信号被接收。通过频率扫描,确定激励频率,在该激励频率下,可振动单元以对应于可指定相位偏移值的振动频率振动。该激励频率在每种情况下都被施加到可振动单元。这种方法的有利发展是de102009028022a1的主题,其中通过仅在特定时刻选择性地对接收信号进行相位采样和评估来简化对接收信号的评估。类似地,在de102010030982a1中提出的是,在与发射信号相关的预定的离散瞬时对接收信号进行采样,将接收信号的采样电压值分别与在存在可指定相位偏移值的情况下接收信号在该瞬时所具有的目标值进行比较,并且在电压值与目标值有偏差的情况下,基于该偏差是正的还是负的来减小或增大发射信号的频率。
11.然而,在通过频率扫描进行激励并且对接收信号的各个相位和/或幅度进行评估的情况下,必须注意的是,频率扫描的扫描速度与频率分辨率之间存在相关性。
12.de00102010030982a1中公开了电子振动传感器将激励信号和接收信号之间的相位偏移调节到可指定值的附加数字可能性。描述了基于锁相环pll的功能原理的方法。在这里设置激励信号的频率,以使得在激励信号和接收信号之间存在可指定相位偏移值。
13.与通过频率扫描进行激励相比,这种类型的激励在评估速度方面具有决定性的优势。然而,可以肯定的是,需要至少一个相位检测器,这在发生外部振动的情况下尤其会影响控制的鲁棒性即特别是稳定性,以及控制电路的精确度。为了以稳定的方式进行评估,必须另外确保将激励信号的幅度保持在恒定值。
14.为了减少在电子振动传感器的操作期间由于发生外部振动(诸如来自泵或超声浴的振动)而引起的问题,de102012101667a1提出以这样的方式配置控制/评估单元,即,在存在至少一个外部振动的情况下根据外部振动的频率和/或幅度来控制振动激励,以使得接收信号基本上不受到外部振动的干扰,和/或抑制外部振动的至少一个频率。
15.为了能够独立于干扰影响进行操作,在尚未公开的文件参考编号为de102014119061a1的德国专利申请中已经获知一种电子振动传感器,该电子振动传感器的电子单元包括自适应滤波器。在该电子振动传感器的正在进行的操作期间,将滤波器特性设置为使得在激励信号和接收信号之间产生目标相位偏移。de102016111134a1进而提出了一种电子振动传感器,该电子振动传感器的电子单元具有至少一个自适应滤波器。交替地
执行两种不同的操作模式,其中在第一模式下激励可机械振动单元中的机械振动,并且其中在第二操作模式下将振动中断,并且将自适应滤波器的滤波器特性的至少一个值设置为使得在激励信号和接收信号之间存在可指定相位偏移。下面对这两份申请的全部内容进行引用。
技术实现要素:
16.从前面提及的现有技术出发,本发明所基于的目的是,提供一种电子振动传感器以及一种用于操作该传感器的方法,所述方法的特征在于高度的测量准确度和高度的可靠性。
17.该目的通过根据权利要求1的电子振动传感器以及通过根据权利要求11的用于操作电子振动传感器的方法来实现。
18.关于传感器,本发明所基于的目的通过用于确定和/或监测容器中的介质的至少一个过程变量的电子振动传感器来实现,该电子振动传感器至少包括可机械振动单元、驱动/接收单元和电子单元,其中所述驱动/接收单元被设计用以借助于电激励信号激励所述可机械振动单元中的机械振动,并且接收所述可机械振动单元的机械振动并将所述机械振动转换成电接收信号,其中所述电子单元被设计用以基于所述接收信号生成所述激励信号并且根据所述接收信号确定所述至少一个过程变量,并且其中所述电子单元包括第一自适应滤波器,并且所述电子单元被设计用以设置自适应滤波器的滤波器特性,以使得在所述激励信号和所述接收信号之间产生目标相位偏移。根据本发明,所述传感器还具有检测单元,该检测单元被设计用以使用正交解调来确定所述激励信号和所述接收信号之间的相位偏移和/或所述接收信号的幅度。
19.滤波器的滤波器特性通常描述滤波器的行为,即滤波器的滤波器性质,并且滤波器的滤波器特性通过所谓的滤波器要求(诸如通带的滤波器要求和阻带的滤波器要求)确定。在一些情况下,滤波器要求还包括关于群延迟、最大过冲、边缘陡度、中心频率、质量等的规范。例如,可以使用已知的滤波器特性,诸如贝塞尔、勒让德、巴特沃斯、切比雪夫、高斯等之一。取决于所选择的滤波器特性,为滤波器适当地设计了传递函数,通过该传递函数完全确定幅度响应、相位响应和频率响应。
20.可以在操作期间设置自适应滤波器的滤波器特性。例如,可以设置与带宽以及中心频率的位置相关的滤波器质量。因此,可以通过设置适当的滤波器特性来适当地设置滤波器的输入信号和输出信号之间的相位偏移φ
filter
。作为将滤波器的输入信号和输出信号之间的相位偏移设置为可指定值的结果,激励信号的频率被设置为使得在激励信号和接收信号之间产生φ
soll
=360
°‑
φ
filter
的可指定相位偏移。由于它是自适应滤波器,即可以被传递的滤波器,所以可以提高滤波器的质量,而不限制相应的频率范围,正如固定滤波器的情况一样。通过滤波器对可指定相位偏移进行设置有利地在很大程度上独立于所产生的干扰影响诸如外部振动,因而根据本发明的电子振动传感器特别鲁棒地工作。
21.自适应滤波器使得现场设备可用于大范围的应用。例如,现场设备可以在不同的相位设置准确度和相关的操作速度下工作。还容易为可指定相位偏移设置不同的值,并且这可以有利地在软件层面上进行。因此,相同的电子单元和布置可以用于不同的可指定相位偏移。根据本发明的解决方案还可以有利地用于相应振荡电路的数字版本和模拟版本以
便激励可振动单元,并且根据本发明的解决方案可以容易地适应于不同的传感器,特别是不同的可振动单元。
22.正交解调本身是从现有技术已知的调制方法,其中将幅度调制和相位调制结合。基于正交调制的模拟方法和数字方法两者均已经为人所知。在电子振动传感器与电子单元与自适应滤波器的结合中,如本发明的情况一样,该解决方案提供了实现对相位偏移的高准确度检测的巨大优势,对相位偏移的检测也独立于相应的信号幅度。在关于相位检测结合电子振动传感器使用的变体(特别是使用锁相原理那些变体)的许多情况下,例如,使用矩形信号以便在每种情况下独立于信号幅度。然而,这具有不利的影响,即,在激励信号和接收信号之间可能出现不期望的附加相位偏移,这对测量准确度具有负面影响。
23.在电子振动传感器的一个实施例中,检测单元包括第一和/或第二参考单元,所述第一和/或第二参考单元用于生成第一和/或第二参考信号以便执行正交解调。
24.关于第一和/或第二参考单元,有利的是,它们被设计用以基于接收信号生成第一和/或第二参考信号。
25.关于(一个或多个)参考单元,进一步有利的是,这两个参考单元之一包括第一相位偏移器,该第一相位偏移器用于生成相对于接收信号具有 /-90
°
的相位偏移的参考信号之一。有利地是,第一相位偏移器特别是第二自适应滤波器,其在设计上特别是与第一自适应滤波器、全通滤波器或希尔伯特变换相同。
26.同样有利的是,两个参考单元中的另一个参考单元包括第二相位偏移器,该第二相位偏移器用于生成相对于接收信号具有0
°
的相位偏移的参考信号之一。第二相位偏移器有利地是乘法器或自适应滤波器,特别是谐振器滤波器。
27.在电子振动传感器的一个实施例中,电子单元被设计用以通过设置自适应滤波器的中心频率,特别是借助于相位控制单元来设置目标相位偏移。因此,中心频率被改变,以使得在激励信号和接收信号之间存在特定的、可指定相位偏移。在这一点上,对de102014119061a1进行参考。
28.在电子振动传感器的另一实施例中,目标相位偏移为90
°
、45
°
或0
°
。虽然根据传感器单元(特别是驱动/接收单元)的实施例,90
°
或0
°
的可指定相位偏移会导致可振动单元的谐振激励,但是对于确定密度或粘度而言, /-45
°
的可指定相位偏移可能是优选的。
29.各种各样的滤波器可以用作自适应滤波器。优选地,第一和/或第二自适应滤波器是谐振器滤波器或带通滤波器,特别是低通滤波器,特别是二阶低通滤波器。
30.根据本发明的电子振动传感器的又一实施例包括,电子单元被设计用以交替地执行第一操作模式和第二操作模式,其中驱动/接收单元被设计用以在所述第一操作模式期间借助于电激励信号激励可机械振动单元中的机械振动,其中所述电子单元被设计用以:在所述第二操作模式期间,
[0031]-借助于激励信号中断可机械振动单元的激励,
[0032]-接收可机械振动单元的机械振动并将其转换成电接收信号,
[0033]-设置自适应滤波器的滤波器特性的至少一个值,以使得在激励信号和接收信号之间存在可指定相位偏移,以及
[0034]-根据接收信号确定至少一个过程变量。
[0035]
在这一点上,参考de102016111134a1。
[0036]
在第一操作模式(以下也称为激励序列)期间,借助于驱动/接收单元激励可机械振动单元中的机械振动。在第二操作模式(也称为测量/控制序列)期间,中断对可振动单元的激励。因此,在第二操作模式期间,电激励信号不被施加到激励/接收单元。在第二操作模式期间,可振动单元以其固有频率以阻尼振动的形式继续振动。将振动转换成电接收信号,进而根据该电接收信号确定至少一个过程变量,并且通过至少对滤波器特性的适当设置将激励信号和接收信号之间的当前相位偏移控制为可指定值或可指定相位偏移。因此,基于接收信号生成激励信号。在这一点上的决定性优势是,可以独立于激励信号来检测呈接收信号形式的机械振动及其评估。如果例如由于设计,激励信号和接收信号之间可能发生耦合,则这是特别有利的。例如,如果发生激励信号和接收信号的叠加,则是这种情况。
[0037]
过程变量例如是料位,特别是可指定的料位、容器中的介质的密度或粘度。电子振动传感器的可振动单元可以被设计为例如隔膜、单杆或振动叉的形式。驱动/接收单元进而可以特别是电磁或压电驱动/接收单元。
[0038]
本发明所基于的目的进一步通过一种用于操作特别是根据所描述的实施例之一的电子振动传感器的方法来实现,所述电子振动传感器用于确定和/或监测容器中的介质的至少一个过程变量,其中借助于电激励信号激励可机械振动单元中的机械振动,并且可机械振动单元的机械振动被接收并且被转换成电接收信号,其中基于接收信号生成激励信号,并且所述至少一个过程变量被确定,并且其中自适应滤波器的滤波器特性被设置为使得在激励信号和接收信号之间存在目标相位偏移。根据本发明,使用正交解调来确定激励信号和接收信号之间的相位偏移和/或接收信号的幅度。
[0039]
激励信号可以是周期信号,例如三角形信号、正弦信号或方波信号。优选地是,当处于调节状态下时,可振动单元以基本模式执行谐振振动。
[0040]
根据本发明的方法还可以用于相应振荡电路的数字版本和模拟版本,以便激励可振动单元。同样地,通过使用根据本发明的方法,可以根据应用实现不同的相位设置准确度,并且可以根据应用设置不同的可指定相位偏移。
[0041]
结合根据本发明的电子振动传感器描述的实施例也可以在加上必要的修改之后应用于根据本发明的方法,反之亦然。
附图说明
[0042]
下面将参考图1至图3更详细地描述本发明及其有利实施例。示出如下:
[0043]
图1:根据现有技术的电子振动传感器的示意图,
[0044]
图2:根据本发明的电子单元的第一实施例的框图,以及
[0045]
图3:根据本发明的电子单元的另一实施例的框图,用于示出两种操作模式的性能。
具体实施方式
[0046]
图1示出了电子振动传感器1。描绘了呈振动叉的形式的可振动单元4,其部分浸入位于容器3中的介质2中。激励/接收单元5激励可振动单元中的机械振动,并且可振动单元例如可以是压电堆叠驱动器或双晶片驱动器。然而,自然可以理解的是,电子振动传感器的其它实施例也属于本发明。此外,还示出了电子单元6,借助于电子单元6进行信号检测、信
号评估和/或信号供应。
[0047]
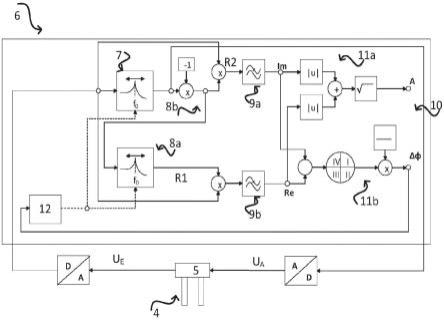
根据本发明的电子单元的第一示例性实施例的框图是图2的主题。
[0048]
借助于激励信号ua激励可振动单元4中的机械振动。表示这些振动的接收信号ue在被供应给第一自适应滤波器7之前首先经过模拟/数字转换器d/a。在连续操作中,自适应滤波器7的滤波器特性被设置为使得激励信号ua和接收信号ue之间存在可指定相位偏移φ
soll
=360
°‑
φ
filter
,其中φ
filter
是自适应滤波器7的输入信号和输出信号之间的相位偏移。然后,控制单元12基于在每种情况下检测到的相位偏移δφ适当地控制相位。关于借助于自适应滤波器7设置目标相位偏移φ
soll
的更多细节,请参考de102014119061a1。
[0049]
借助于检测单元10,确定接收信号ue的幅度11a以及激励信号ua与接收信号之间的相位偏移11bδφ。根据本发明,检测单元10被设计用以使用正交解调来确定相位偏移δφ。以此方式,可以实现与所述确定相关的高度准确度,所述确定也有利地独立于各个信号幅度。在进入检测单元10之前,这里的各个输入信号都经过本身可选的低通滤波器9a、9b。
[0050]
借助于正交解调来检测相位δφ需要两个参考信号r1、r2,在这里所示的实施例中,这两个参考信号r1、r2有利地从接收信号ue生成。有利地是,不需要另外的信号源来生成参考信号r1、r2。参考信号r1和r2可以以特别简单的方式生成。第一参考单元8a用于生成相对于接收信号ue具有 90
°
的相位偏移的第一参考信号r1,并且为了这个目的,举例来说,第一参考单元8a在这里包括第二自适应滤波器,该第二自适应滤波器具有与第一自适应滤波器7相同的设计。替代地,可以使用在设计上与第一自适应滤波器7不同的其它元件;例如也可以使用自适应带通滤波器。第一参考单元8a还可以包括多个部件以生成 /-90
°
的相位偏移。
[0051]
第二参考单元8b用于生成相对于接收信号ue具有0
°
相位偏移的第二参考信号r2,并且在这里第二参考单元8b包括用于此目的的乘法器。此外,应当注意,存在本领域技术人员熟悉的许多可用的其它替代方案。
[0052]
根据本发明的电子单元6的另一个示例性实施例是图3的主题。对于该实施例,执行两种不同的操作模式,并且电子单元6包括用于在这两种操作模式之间来回切换的切换元件13。
[0053]
关于两种操作模式的性能,请参考de102016111134a1。在也称为激励序列的第一种操作模式中,将激励信号ua施加到可振动单元4上,并且引起机械振动。因此,可振动单元4以这种方式存储振动能量。来自可振动单元4的接收信号ue叠加在激励信号ua上。在激励序列期间,不针对激励信号ua和接收信号ue之间的当前相位偏移δφ进行主动测量或设置。自适应滤波器7的滤波器特性保持恒定。
[0054]
在第二操作模式16(也称为测量/控制序列)期间,借助于切换元件13中断向传感器单元4、5施加激励信号ua。可振动单元4现在以其固有谐振频率f0振动,并且相应地执行阻尼谐振振动。激励信号ua现在不再叠加在接收信号ue上,因而可以在为此目的而设计的电子单元6的评估单元14中执行适当的信号评估,举例来说,评估单元14在这里具有数字控制振荡器dco和用于检测零交叉的单元15。继续对激励信号ua和接收信号ue之间的当前相位偏移δφ进行控制。例如,为了控制当前相位偏移δφ,可以适当地设置自适应滤波器7的中心频率fm。因此,在连续测量/控制序列期间,相继地改变用于控制和相位测量的各种内部参数和/或这些参数的值,直到例如发生传感器单元4、5的谐振激励为止。
[0055]
附图标记列表
[0056]
1电子振动传感器
[0057]
2介质
[0058]
3容器
[0059]
4可振动单元
[0060]
5机电变换器单元
[0061]
6电子单元
[0062]
7自适应滤波器
[0063]
8、8a、8b参考单元
[0064]
9、9a、9b低通滤波器
[0065]
10检测单元
[0066]
11a、11b对幅度(a)和相位(b)的检测
[0067]
12控制单元
[0068]
13切换元件
[0069]
14评估单元
[0070]
15用于检测零交叉的单元
[0071]
ua激励信号
[0072]
ue接收信号
[0073]fm
自适应滤波器的中心频率
[0074]
f0可振动单元的谐振频率
[0075]al
幅度
[0076]
δφ相位偏移
[0077]
φ
soll
激励信号和接收信号之间的可指定相位偏移
[0078]
φ
filter
自适应滤波器的输入信号和输出信号之间的相位偏移
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。