技术特征:
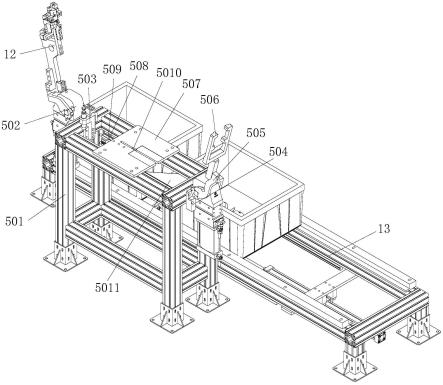
1.轮胎锁板无序抓取工作站,包括:输送线机构(1)和用于对轮胎锁板(11)识别的相机识别机构(2),其特征在于,所述输送线机构(1)由输送组件(7)、料箱顶升组件(8)、料箱抖动组件(9)和料箱(10)构成,所述输送组件(7)包括伺服电机(701)、减速机(702)、主动轮(703)、轮子盖板(704)、从动轮(705)、输送整体框架(706)和皮带(707),输送整体框架(706)为铝型材框架,两端四个轮子盖板(704)固定在输送整体框架(706)上,主动轮(703)、从动轮(705)通过轮子盖板(704)覆盖,伺服电机(701)与减速机(702)安装在输送整体框架(706)上并与主动轮(703)连接,皮带(707)套在两侧的主动轮(703)和从动轮(705)上,料箱顶升组件(8)包括第一气缸安装板(801)、第一气缸(802)、第一料箱挡块(803)和第一落料仓挡片(804),所述第一气缸安装板(801)安装在输送整体框架(706)上,第一气缸(802)安装固定在第一气缸安装板(801)上,第一气缸(802)上端安装第一料箱挡块(803),四个第一落料仓挡片(804)安装在第一料箱挡块(803)上端两侧,所述相机识别机构(2)的下方设有机器人系统(3),所述机器人系统(3)的一侧设有中转定位机构(4),所述机器人系统(3)的另一侧设有控制柜(6),所述机器人系统(3)背离输送线机构(1)的一侧设有无序模拟机构(5),所述料箱(10)内放置有若干轮胎锁板(11),所述无序模拟机构(5)上安装有治具组件(12),所述无序模拟机构(5)的一侧设有料箱交替组件(13)。2.根据权利要求1所述的轮胎锁板无序抓取工作站,其特征在于,所述相机识别机构(2)包括识别整体框架(201)、相机安装板(202)和三维机械手视觉系统(203),识别整体框架(201)为铝型材框架,两个相机安装板(202)安装固定在识别整体框架(201)上,三维机械手视觉系统(203)安装在两个相机安装板(202)上。3.根据权利要求1所述的轮胎锁板无序抓取工作站,其特征在于,所述机器人系统(3)由底座(301)、机器人安装底板(302)、ur协作机器人(303)和抓具组件(304)构成,所述底座(301)为铝型材框架,机器人安装底板(302)安装固定在底座(301)上,ur协作机器人(303)安装在机器人安装底板(302)上,ur协作机器人(303)机械臂前端安装抓具组件(304)。4.根据权利要求1所述的轮胎锁板无序抓取工作站,其特征在于,所述无序模拟机构(5)包括入料台框架(501)、旋转夹紧气缸(502)、液压缓冲组件(503)、气缸安装板(504)、气缸旋转夹紧臂(505)、压块(506)、落料底板(507)、推料气缸安装板(508)、推料气缸(509)、推料块(5010)和落料槽(5011),入料台框架(501)整体为铝型材框架固定在地面上,两个旋转夹紧气缸(502)通过两个气缸安装板(504)安装固定在入料台框架(501)上,两个气缸旋转夹紧臂(505)端分别安装治具组件(12)和压块(506),液压缓冲组件(503)安装在入料台框架(501)内侧左侧,落料底板(507)安装在入料台框架(501)上方,推料气缸安装板(508)安装在落料底板(507)下方,推料气缸(509)与推料气缸安装板(508)连接固定,推料气缸(509)前端安装推料块(5010),落料槽(5011)安装在入料台框架(501)内侧,所述落料槽(5011)的下方设有料箱交替组件(13),且料箱交替组件(13)固定在地面上。5.根据权利要求1所述的轮胎锁板无序抓取工作站,其特征在于,所述料箱抖动组件(9)包括第二气缸安装板(901)、第二气缸(902)、l型安装板(903)、第三气缸(904)、t型安装板(905)、第二料箱挡块(906)和第二落料仓挡片(907),第二气缸安装板(901)安装固定在输送整体框架(706)上,第二气缸(902)安装固定在第二气缸安装板(901)上,第二气缸(902)上端安装l型安装板(903),第二气缸(902)安装在l型安装板(903)上,第二气缸(902)前端连接t型安装板(905),t型安装板(905)上端安装第二料箱挡块(906)和第二落料仓挡
片(907)。6.根据权利要求4所述的轮胎锁板无序抓取工作站,其特征在于,所述治具组件(12)由主要连杆(121)、下侧连接件垫块(122)、缓冲挡块(123)、长杆(124)、长连杆连接件(125)、主要连杆配合件(126)、连杆块(127)、外侧连接杆(128)、夹具头三(129)、夹具头一(1210)、垫块(1211)、夹具头二(1212)、电磁铁(1213)和定位销(1214)构成,主要连杆(121)安装在旋转夹紧气缸(502)上,缓冲挡块(123)、下侧连接件垫块(122)、长杆(124)、主要连杆配合件(126)安装固定在主要连杆(121)上,长连杆连接件(125)安装在长杆(124)上,连杆块(127)与主要连杆配合件(126)连接,外侧连接杆(128)与连杆块(127)连接,外侧连接杆(128)安装在连杆块(127)上,夹具头三(129)、夹具头一(1210)和夹具头二(1212)安装在外侧连接杆(128)上,且夹具头三(129)和夹具头二(1212)中间装有电磁铁(1213),垫块(1211)安装在夹具头一(1210)上,定位销(1214)安装在外侧连接杆(128)中。7.根据权利要求4所述的轮胎锁板无序抓取工作站,其特征在于,所述料箱交替组件(13)由料箱交替框架(131)、料箱导向条(132)、推箱滑板(133)、推箱气缸安装板(134)、推箱气缸(135)、推箱块(136)、推送气缸(137)、气缸连接块(138)、推箱气缸底板(139)、料箱交替线轨底板(1310)、线轨(1311)、滑块(1312)和推缸连接板(1313)构成,料箱交替框架(131)整体为铝型材框架,料箱导向条(132)安装在料箱交替框架(131)上方的铝型材上,推箱气缸安装板(134)、料箱交替线轨底板(1310)安装在料箱交替框架(131)下方的铝型材上,两个线轨(1311)安装在两个料箱交替线轨底板(1310)上,四个滑块(1312)安装在两根线轨(1311)上,两个推箱滑板(133)安装在四个滑块(1312)上,推缸连接板(1313)与两个推箱滑板(133)连接,推箱气缸(135)通过两个气缸连接块(138)安装在推箱气缸底板(139)上,推箱气缸(135)前端与推缸连接板(1313)连接,两个推箱气缸安装板(134)侧面与两个推箱滑板(133)连接,两个推箱气缸(135)安装在两个推箱气缸安装板(134)上,两个推箱气缸(135)上安装两个推箱块(136)。
技术总结
本实用新型涉及轮胎锁板技术领域,具体为轮胎锁板无序抓取工作站,包括:输送线机构和用于对轮胎锁板识别的相机识别机构,所述输送线机构由输送组件、料箱顶升组件、料箱抖动组件和料箱构成,所述相机识别机构的下方设有机器人系统,所述机器人系统的一侧设有中转定位机构,所述机器人系统的另一侧设有控制柜,所述机器人系统背离输送线机构的一侧设有无序模拟机构,所述料箱内放置有若干轮胎锁板,所述无序模拟机构上安装有治具组件,所述无序模拟机构的一侧设有料箱交替组件。本实用新型实现了汽车轮胎锁板在线无序抓取,不需要人工搬运定位然后再进行人工焊接,有效的提高了生产过程的自动化水平,提高了生产效率。提高了生产效率。提高了生产效率。
技术研发人员:陈高铭 付企凡 张炜 张亚平
受保护的技术使用者:上海交通大学
技术研发日:2022.11.02
技术公布日:2023/2/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。