1.本发明涉及用于机动车的自动纵向引导的驾驶员辅助系统和方法。
背景技术:
2.在本文的范畴中,术语“自动驾驶”可以理解为具有自动纵向或横向引导的驾驶、或具有自动纵向和横向引导的自动驾驶。术语“自动驾驶”包括具有任何自动化程度的自动驾驶。示例性的自动化程度是辅助驾驶、部分自动化驾驶、高度自动化驾驶或全自动驾驶。这些自动化程度由联邦公路研究所(bast)定义(参见bast出版物“forschung kompakt”,第11/2012期)。在辅助驾驶中,驾驶员持续进行纵向或横向引导,而系统在一定范围内接管其他功能。在部分自动驾驶(taf)中,系统会在一段时间内和/或在特定情况下接管纵向和横向引导,其中驾驶员必须像在辅助驾驶中那样持续监控系统。在高度自动驾驶(haf)中,系统在一定时间内接管纵向和横向引导,驾驶员无需持续监控系统;但是驾驶员必须能够在一定时间内接管车辆引导。在全自动驾驶(vaf)中,系统可以对于特定应用情况自动处理在所有状况下的驾驶;对于该应用情况不再需要驾驶员。上面提到的四个自动化级别,由bast定义,对应于标准sae j3016(sae,汽车工程学会)的sae 1到4级。例如,根据bast,高度自动驾驶(haf)对应于标准sae j3016的第3级。此外,在sae j3016中还提供了sae 5级作为最高自动化程度,该级别并不包含在bast的定义中。sae 5级对应无人驾驶,系统可以像人类驾驶员一样在整个驾驶期间自动处理所有状况;通常不再需要驾驶员。
3.用于自动纵向引导的驾驶员辅助系统通常没有关于机动车驾驶员预期路程的信息。出于这个原因,当机动车驾驶员的预期路线需要转弯过程时,用于自动纵向引导的传统驾驶员辅助系统的行为非常不舒服。
技术实现要素:
4.本发明的目的在于,当机动车驾驶员的预期路线需要转弯过程时,使用于自动纵向引导的驾驶员辅助系统的行为更加舒适。
5.该目的通过独立权利要求的特征来实现。在从属权利要求中描述了有利的实施方式。需要指出的是,从属于独立权利要求的权利要求的附加特征可以在没有独立权利要求的特征的情况下,或在仅与独立权利要求的特征的子集相组合的情况下形成自己的且独立于独立权利要求的所有特征的组合的发明,该发明可以作为独立权利要求、分案申请或后续申请的主题。这同样适用于说明书中描述的技术教导,其可以形成不取决于独立专利权利要求的特征的发明。
6.本发明的第一方面涉及一种用于机动车的自动纵向引导的驾驶员辅助系统,该驾驶员辅助系统特别是仅接管机动车的纵向引导而并不接管机动车的横向引导。作为对此的替代,根据本发明的驾驶员辅助系统还尤其接管机动车的横向引导。本发明基于这样的认识,即所述任务与驾驶员辅助系统是仅接管机动车的纵向引导还是还接管机动车的横向引导无关。
7.驾驶员辅助系统被设置用于识别机动车的至少一个可能转弯处,即例如十字路口、入口、引道或出口。
8.此外,驾驶员辅助系统被设置用于根据至少一个已识别的可能转弯处降低机动车的速度。
9.特别地,驾驶员辅助系统被设置用于根据可能转弯处的位置或根据机动车与可能转弯处的距离来降低机动车的速度。
10.此外,驾驶员辅助系统尤其设置为,从识别到可能转弯处起,即例如在识别到可能转弯处时马上、或仅稍后但在到达可能转弯处之前,降低机动车的速度。
11.在本发明的一个有利实施方式中,驾驶员辅助系统被设置为在行驶方向上在位于机动车前方的行驶路程的部分区域、即机动车未来驶过的路程的部分中,识别机动车的至少一个可能转弯处,并且根据至少一个已识别的可能转弯处降低机动车的速度。
12.在本发明的一个有利实施方式中,驾驶员辅助系统被设置为根据第一预定车辆减速来确定部分区域的第一端。
13.部分区域的第一端尤其是部分区域的更靠近机动车的端部,并且因此从机动车的角度看,该端部代表部分区域的开始。
14.本发明基于以下认识,即为了机动车的乘客的舒适性以及考虑到后面的交通,机动车在转弯之前应该仅以上限最大减速度来减速。由此可以从机动车的当前位置、机动车的当前速度和最大期望减速来确定最早应当进行转弯操纵的地理位置。
15.第一预定车辆减速度尤其是具有上限的最大减速度,例如-1.5m/s2。尤其是,驾驶员辅助系统被设置用于根据取决于机动车速度的第一预定车辆减速度来确定部分区域的第一端。
16.例如,第一预定车辆减速度在14km/h时为-1.5m/s2、在30km/h时为-2m/s2、在39km/h时为-2.3m/s2。
17.例如,如果速度介于所提到的两个值之间,则可以在与速度相关的减速度之间线性插值第一预定车辆减速度。如果速度低于所提到的最小值或高于所提到的最大值,则所提到的最小值或最大值都可以用于第一预定车辆减速度。
18.在本发明的另一有利实施方式中,驾驶员辅助系统被设置为根据第二预定车辆减速度确定部分区域的第二端。第二预定车辆减速度例如是-0.25m/s2或-0.5m/s2。
19.部分区域的第二端尤其是部分区域的更远离机动车的端部,因此从机动车的角度看,该端部代表部分区域的结束。
20.利用第二预定车辆减速度,也可以从机动车的当前位置、机动车的当前速度和第二预定车辆减速度来确定地理位置。
21.特别地,第二预定车辆减速度仅用于确定部分区域的第二端。虽然它实际上可以用来使机动车减速,但并不强制是这样,因为如果机动车在可能转弯处前以不变的速度行驶较长时间、然后比第二预定车辆减速度更显著地减速,那么机动车的驾驶者会有更舒适的驾驶体验。
22.在本发明的另一有利实施方式中,驾驶员辅助系统被设置为识别机动车的至少两个可能转弯处,特别是在行驶方向上位于机动车前方的行驶路程的上述部分区域中进行识别。
23.此外,驾驶员辅助系统被设置为选择机动车的至少两个可能转弯处之一,并且根据所选择的可能转弯处降低机动车的速度。
24.在本发明的另一有利实施方式中,驾驶员辅助系统被设置为对于机动车的至少两个可能转弯处中的每个可能转弯处确定道路类型,并且根据它们相应的道路类型选择至少两个可能转弯处中的一个可能转弯处。
25.例如,法律可以规定道路类型系统。例如,德国的道路交通法规承认以下道路类型:高速公路、类似高速公路的道路、机动车道、建成区外的道路、建成区内的道路。
26.道路类型系统也可以通过其他参数来指定或补充,例如允许的最大速度、道路宽度或线道数。
27.尤其是道路类型系统规定了各个道路类型的优先级,从而例如设置驾驶员辅助系统以选择具有最高优先级的可能转弯处。
28.在本发明的另一有利实施方式中,驾驶员辅助系统被设置为对于机动车的至少两个可能转弯处中的每个可能转弯处的道路类型确定重要性,并选择至少两个可能转弯处中具有最高重要性的可能转弯处。
29.例如,该重要性可以来自上述道路类型系统。或者,该重要性也可以来自其他数据,例如导航数据,诸如测量的交通量或所确定的平均速度。
30.在本发明的另一有利实施方式中,驾驶员辅助系统被设置为在机动车以自动纵向引导运行时识别机动车的驾驶员的转弯意愿,并且根据已识别的转弯意愿降低机动车的速度。
31.尤其是,驾驶员辅助系统被设置为根据本发明的第三和/或第四方面的教导来识别转弯意愿。
32.本发明的第四第二方面涉及一种用于机动车的自动纵向引导的方法。
33.该方法的一个步骤是识别机动车的至少一个可能转弯处。
34.该方法的另一步骤是根据至少一个已识别的可能转弯处降低机动车的速度。
35.本发明的第三方面涉及一种用于机动车的自动纵向引导的驾驶员辅助系统。尤其是,根据本发明的驾驶员辅助系统并不接管机动车的横向引导。作为对此的替代,根据本发明的驾驶员辅助系统也接管机动车的横向引导。本发明基于这样的认识,即所述任务与驾驶员辅助系统是仅承担机动车的纵向引导还是附加地也承担机动车的横向引导无关。
36.驾驶员辅助系统被设置为在机动车以自动纵向引导运行时识别机动车驾驶员的转弯意愿,并根据已识别的转弯意愿降低机动车的速度。
37.尤其是,驾驶员辅助系统被设置为在识别到转弯意愿时最早降低机动车的速度。例如,驾驶员辅助系统被设置为在识别出转弯意愿的时间点降低机动车的速度,或者仅在稍后的时间点降低机动车的速度。
38.在本发明的有利实施方式中,驾驶员辅助系统被设置为识别机动车的转向指示器的激活,特别是通过评估由机动车驾驶员对用于转向指示器的激活开关的操作来实现。
39.驾驶员辅助系统还特别被设置为识别哪个转向指示器被激活,即是右转向指示器还是左转向指示器被激活。
40.驾驶员辅助系统被设置为根据转向指示器的激活来识别驾驶员的转弯意愿。换言之,当转向指示器被激活时,识别出驾驶员的转弯意愿。例如,当左转向指示器被激活时,识
别出向左的转弯意愿,并且,例如,当右转向指示器被激活时,识别出向右的转弯意愿。
41.特别是,如果转向指示器的启动开关可以分几个阶段启动,例如通过触碰和停歇阶段,则驾驶员辅助系统被设置为至少在激活开关的第二阶段、即例如在停歇阶段识别驾驶员的转弯意愿。
42.在本发明的另一有利实施方式中,驾驶员辅助系统被设置为确定机动车所行驶的定向车行道上的线道数量并且根据所确定的车道数量识别驾驶员的转弯意愿。
43.车行道用作交通空间,由各个车道组成。定向车行道仅用于一个方向的交通。
44.车道(也称为车道)表示可供车辆在一个方向上行驶的区域。
45.例如,本发明基于这样的知识,即当在具有多条车道的定向车行道上行驶时,除了转弯之外还可以进行车道变换,因此将驾驶员的转弯意愿与驾驶员的车道变换意愿区分开来。
46.在本发明的另一有利实施方式中,机动车行驶的定向车行道恰好包括一个车道。
47.在这种情况下,驾驶员辅助系统被设置为识别机动车的转向指示器的激活并且根据转向指示器的激活来识别驾驶员的转弯意愿。
48.如果例如机动车位于仅包括一个车道的行车道上,则根据转向指示器的激活识别转弯意愿,例如直接在由机动车驾驶员激活转向指示器时识别。
49.在本发明的另一有利实施方式中,机动车行驶的定向车行道包括多于一条车道,即例如两条或三条车道。
50.在这种情况下的附加的困难是,例如,除了机动车驾驶员的转弯意愿之外还可能存在机动车驾驶员的车道变换意愿,和/或不同的车道基于适用的交通法规而提供不同的转弯机会。
51.在这种情况下,驾驶员辅助系统被设置为确定机动车所行驶的车道,并且根据机动车(kfz)所行驶的车道(fs1)确定驾驶员的转弯意愿。
52.特别地,驾驶员辅助系统被设置为识别机动车的转向指示器的激活,并且如果机动车所行驶的车道允许在激活的转向指示器的方向上转弯,则确认驾驶员的转弯意愿。
53.如果例如激活左转向指示器并且机动车位于左侧车道上,则确认驾驶员的转弯意愿。否则,如果右转向指示器被激活并且机动车位于左侧车道上,则不会确认驾驶员的转弯意愿。在这种情况下,可能存在机动车驾驶员的车道变换意愿。
54.特别地,驾驶员辅助系统被设置为识别机动车的转向指示器的激活,并且当机动车所行驶的车道允许在激活的转向指示器的方向上转弯时确认驾驶员的转弯意愿,例如,即使当机动车所行驶的车道是允许在多个方向上行驶(例如转弯和直行)和/或当多个车道允许在同一方向上转弯时也是如此。
55.在本发明的另一有利实施方式中,机动车所行驶的定向车行道包括多条车道,并且驾驶员辅助系统不能确定机动车所行驶的车道。
56.例如,当用于定位机动车的传感器无法生成足够准确的数据时,就会出现这种情况。
57.在这种情况下,驾驶员辅助系统被设置为识别机动车的转向指示器的激活,并且当转向指示器被激活超过预定时间段时确定或确认驾驶员的转弯意愿。该预定时间段例如是3秒。
58.在本发明的另一有利实施方式中,驾驶员辅助系统被设置为识别机动车的转向指示器的激活、识别跟随转向指示器激活的机动车的车道变换、以及在车道变换之后根据转向指示器的激活识别驾驶员的转弯意愿。
59.尤其是,驾驶员辅助系统被设置为识别车道变换,这通过设置用于检查机动车的参考点、例如机动车的后桥的中心点是否超过两条车道之间的分界线。
60.在本发明的另一有利实施方式中,驾驶员辅助系统被设置为当转弯指示器在车道变换后被激活的时间长于预定时间段,例如另外的3秒或5秒,则识别驾驶员的转弯意愿。
61.在另一有利的实施方式中,驾驶员辅助系统被设置为当转向指示器在车道变换之后被机动车驾驶员停用并且然后再次被激活时识别驾驶员的转弯意愿。
62.在本发明的另一有利实施方式中,驾驶员辅助系统被设置为识别机动车的可能转弯处并且根据所识别的可能转弯处降低机动车的速度。
63.特别地,驾驶员辅助系统被设置为根据本发明的第一和/或第二方面的教导识别可能转弯处。
64.本发明的第四方面涉及一种用于机动车的自动纵向引导的方法。
65.该方法的一个步骤是识别机动车的驾驶员在机动车以自动纵向引导运行时的转弯意愿。
66.该方法的另一个步骤是在识别出转弯意愿时降低机动车的速度。
附图说明
67.下面借助附图使用实施例来描述本发明。其中:
68.图1示出了本发明的一个实施例,
69.图2示出了本发明的另一个实施例,
70.图3显示了本发明的另一个实施例,并且
71.图4示出了本发明的另一个实施例。
具体实施方式
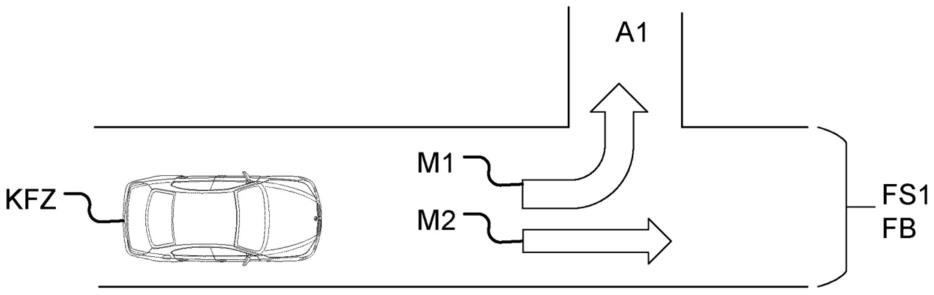
72.图1示出了用于机动车kfz的自动纵向引导的驾驶员辅助系统的实施例。
73.驾驶员辅助系统被设置为在以自动纵向引导的机动车kfz运行时识别机动车kfz的驾驶员的转弯意愿。
74.机动车kfz的驾驶员的转弯意愿描述了机动车kfz的驾驶员在向驾驶员提供两个或多个机会m1、m2以继续驾驶的位置处的意愿,其中这些机会之一、例如m2意味着留在当前车道fs1,并且其他的机会、例如m1意味着在可能转弯处a1处从当前车道fs1转弯。
75.此外,驾驶员辅助系统被设置为根据已识别的转弯意愿降低机动车kfz的速度。
76.尤其是,驾驶员辅助系统为此被设置为识别机动车kfz的转向指示器的激活,并且确定机动车kfz所行驶的定向车行道fb上的车道fs1的数量。
77.当机动车kfz行驶的定向道路fb仅包括一个车行道fs1时,如图1所示,驾驶员辅助系统被设置为根据方向指示器的激活来识别驾驶员的转弯意愿。
78.图2示出了用于机动车kfz的自动纵向引导的驾驶员辅助系统的另一实施例。
79.在此,驾驶员辅助系统被设置为在机动车kfz以自动纵向引导运行时识别机动车
kfz的驾驶员的转弯意愿,其中在本实施例中机动车所行驶的定向车行道fb包括多于多个车道fs1、fs2,即两条车道。
80.车道fs1提供两个用于继续行驶的机会m1、m2,其中m1表示在机会a1处从车道fs1转弯。
81.车道fs2仅提供一个用于继续行驶的机会m3,即留在定向车行道fb上。
82.驾驶员辅助系统被设置为确定机动车kfz所行驶的车道fs1,并且根据机动车kfz所行驶的车道fs1确定驾驶员的转弯意愿。
83.例如如果机动车kfz的驾驶员以如下方式操作控制元件、例如闪光灯控制杆,即这尤其可以推断出向左的转弯意愿,则在此情况下该驾驶员辅助系统确定或确认驾驶员的转弯意愿,这是因为在机动车kfz的当前车道fs1上可以在可能转弯处a1处向左转弯。
84.否则,如果驾驶员辅助系统不能确定机动车kfz所行驶的车道fs1,则驾驶员辅助系统仍然可以确定驾驶员的转弯意愿,这由此实现,即驾驶员辅助系统被设置为识别机动车kfz的转弯指示器的激活,当转向指示器被激活超过预定时间段时确定驾驶员的转弯意愿。
85.图3示出了用于机动车kfz的自动纵向引导的驾驶员辅助系统的另一实施例。
86.驾驶员辅助系统在此被设置为在机动车kfz以自动纵向引导运行时识别机动车kfz的驾驶员的转弯意愿,其中在本实施例中机动车所行驶的定向车行道fb包括多条车道fs1、fs2,即两条车道。
87.车道fs2提供两个用于继续行驶的机会m1、m2,其中m1表示在可能转弯处a1处从车道fs2转弯。
88.车道fs1仅提供一个用于继续行驶的机m3用于,即留在定向车行道fb上。
89.驾驶员辅助系统被设置为确定机动车kfz所行驶的车道fs1,并且根据机动车kfz所行驶的车道fs1确定驾驶员的转弯意愿。
90.例如如果机动车kfz的驾驶员以如下方式操作控制元件、例如闪光灯控制杆,即这尤其可以推断出向左的转弯意愿,则在此情况下该驾驶员辅助系统确定或确认没有驾驶员的转弯意愿,这是因为在机动车kfz的当前车道fs1上不能向左转弯。
91.然而,如果机动车kfz在这种情况下从车道fs1改变到车道fs2上,则可以向左转弯。
92.在这种情况下,驾驶员辅助系统尤其被设置为识别机动车kfz的转弯指示器的激活、识别机动车kfz跟随转弯指示器的激活的车道变换、并且在车道变换之后根据转弯指示器的激活识别驾驶员的转弯意愿,这例如由此实现,即驾驶员辅助系统被设置为在转弯指示器车道变换之后被激活超过预定时间段时识别驾驶员的转弯意愿。
93.图4示出了用于机动车kfz的自动纵向引导的驾驶员辅助系统的另一实施例。
94.驾驶员辅助系统被设置为识别机动车kfz的至少一个可能转弯处a1-a4,并且根据至少一个已识别的可能转弯处a1-a4降低机动车kfz的速度。
95.特别地,驾驶员辅助系统被设置为识别机动车kfz的转向指示器的激活,根据转弯指示器的激活来识别驾驶员的转弯意愿,并且然后识别机动车kfz的至少一个可能转弯处a1-a4。
96.有利地,驾驶员辅助系统被设置为确定在行驶方向上位于机动车kfz前方的行驶
路程的部分区域,其中驾驶员辅助系统被设置为根据第一预定车辆减速度来确定该部分区域的第一端e1,并且根据第二预定车辆减速度来确定该部分区域的第二端e2。
97.此外,驾驶员辅助系统被设置为,在行驶方向上位于机动车kfz前方的行驶路径的部分区域内识别机动车kfz的至少一个可能转弯处a2、a3,并根据至少一个已识别的可能转弯处a2、a3减少机动车kfz的速度。
98.为了降低机动车kfz的速度,驾驶员辅助系统被设置为选择部分区域中的至少两个可能转弯处a2、a3之一,并且根据所选择的可能转弯处降低机动车kfz的速度。
99.例如,可以通过为机动车kfz的至少两个可能转弯处a2、a3中的每一个确定道路类型、并根据它们相应的道路类型选择至少两个可能转弯处a2、a3之一,来进行该选择。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
