1.本实用新型属于预制构件模板拆装技术领域,尤其涉及一种模板拆装装置。
背景技术:
2.建筑行业中,在制作预制构件的时候,一般会用到模具,以桩为例,制作空心桩的模具结构进一步包括位于桩两端的端头模板、两侧的侧模板以及预埋在桩内的芯模。
3.在制作预制桩的过程中,需要在制作前对预制桩的模具进行安装以及在浇筑成型后对模具进行拆卸,针对侧模板的安装以及拆卸,现有的拆装方式为通过人工来完成,此种拆装方式花费的人力资源较多。
技术实现要素:
4.本发明提供的一种模板拆装装置,在拆装侧模板时无需人力参与,节省人力资源。
5.本实用新型提供一种模板拆装装置,包括固定架、驱动组件、连接组件和预制构件检控模块;
6.所述驱动组件安装于所述固定架;
7.所述连接组件安装于所述驱动组件,以在预制构件的侧面拆装侧模板;
8.所述预制构件检控模块电连接所述驱动组件,以在检测到拆装工位上存在预制构件的情况下指示所述驱动组件对所述连接组件进行移动控制。
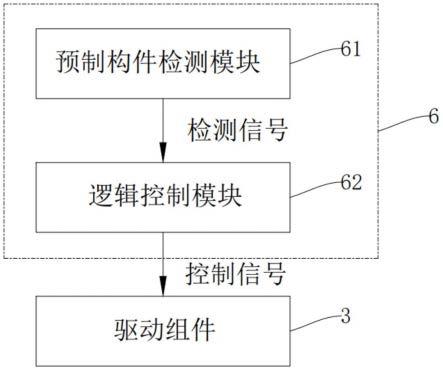
9.在一可实施方式中,所述预制构件检控模块包括预制构件检测模块和逻辑控制模块;
10.所述预制构件检测模块电连接所述逻辑控制模块,以检测拆装工位上是否存在预制构件;
11.所述逻辑控制模块电连接所述驱动组件,以指示所述驱动组件对所述连接组件进行移动控制。
12.在一可实施方式中,所述预制构件检测模块包括压力传感器和比较器;
13.所述压力传感器安装于拆装工位;
14.所述比较器电连接所述压力传感器以及所述逻辑控制模块。
15.在一可实施方式中,所述预制构件检测模块为距离传感器;
16.所述距离传感器安装于所述固定架,以在预定的距离范围内检测拆装工位上是否存在预制构件。
17.在一可实施方式中,所述逻辑控制模块为可编程逻辑控制器plc、微控制单元mcu和中央处理器cpu中的至少一种。
18.在一可实施方式中,所述驱动组件包括移动架、第一驱动件和第二驱动件;
19.所述连接组件活动安装于所述移动架;
20.所述移动架活动安装于所述固定架;
21.所述第一驱动件电连接预制构件检控模块,所述第一驱动件安装于所述固定架且
连接于移动架,以使所述连接组件往靠近或远离预制构件上的侧模板的方向移动;
22.所述第二驱动件电连接预制构件检控模块,所述第二驱动件安装于所述移动架且连接于所述连接组件,以使所述连接组件沿预制构件上的侧模板长度方向移动连接侧模板。
23.在一可实施方式中,所述第一驱动件和第二驱动件为电动气缸、电动油缸或直线电机;
24.所述第一驱动件32和第二驱动件33的驱动方向相垂直。
25.在一可实施方式中,所述连接组件包括导杆和连接件;
26.所述导杆活动安装于所述移动架并连接第二驱动件;
27.所述连接件安装于所述导杆,以在预制构件的侧面拆装侧模板。
28.在一可实施方式中,所述固定架内设有容纳腔;
29.在所述驱动组件未对所述连接组件进行移动控制的情况下,所述驱动组件和连接组件位于所述容纳腔内。
30.在一可实施方式中,还包括多个预制构件承载台;
31.多个所述预制构件承载台前后并排间隔布置。
32.本实用新型提供的一种模板拆装装置,通过预制构件检控模块对拆装工位上是否存在预制构件进行检测,在检测到预制构件的情况下通过驱动组件自动控制连接组件对预制构件的模板进行拆装操作,此过程无需人力参与,节省了人力资源。
33.需要理解的是,本实用新型的教导并不需要实现上面所述的全部有益效果,而是特定的技术方案可以实现特定的技术效果,并且本实用新型的其他实施方式还能够实现上面未提到的有益效果。
附图说明
34.通过参考附图阅读下文的详细描述,本实用新型示例性实施方式的上述以及其他目的、特征和优点将变得易于理解。在附图中,以示例性而非限制性的方式示出了本实用新型的若干实施方式,其中:
35.图1为本实用新型实施例中模板拆装装置的结构示意图;
36.图2为本实用新型实施例中预制构件检控模块和驱动组件的电连接示意图;
37.图3为本实用新型实施例中压力传感器、比较器、逻辑控制模块和驱动组件的电连接示意图;
38.图4为本实用新型实施例中距离传感器、逻辑控制模块和驱动组件的电连接示意图;
39.图5为本实用新型实施例中驱动组件和连接组件的具体结构示意图。
40.图中:1、预制构件承载台;2、固定架;3、驱动组件;31、移动架;32、第一驱动件;33、第二驱动件;4、连接组件;41、导杆;42、连接件;51、预制构件;52、侧模板;53、端头模板;6、预制构件检控模块;61、预制构件检测模块;611、压力传感器;612、比较器;613、距离传感器;62、逻辑控制模块;7、容纳腔。
具体实施方式
41.为使本实用新型的目的、特征、优点能够更加的明显和易懂,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而非全部实施例。基于本实用新型中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
42.参考图1和图2所示,本实用新型实施例提供一种模板拆装装置,包括固定架2、驱动组件3、连接组件4和预制构件检控模块6;驱动组件3安装于固定架2;连接组件4安装于驱动组件3,以在预制构件51的侧面拆装侧模板52;预制构件检控模块6电连接驱动组件3,以在检测到拆装工位上存在预制构件51的情况下指示驱动组件3对连接组件4进行移动控制。
43.本实施例中,本模板拆装装置用于安装以及拆卸预制构件51上的侧模板52,预制构件51具体可以是桩、柱、板或墙等。
44.固定架2可以安装在地面上或者其他设备的安装平台上。
45.预制构件检控模块6具体可以安装在固定架2上,用于检测拆装工位上是否存在预制构件51并根据检测结果向驱动组件3发送相应的控制信号,其中,检测方式具体可以是通过压力检测的方式,也可以是通过距离范围检测的方式;预制构件检控模块6若检测到拆装工位上存在预制构件51,则向驱动组件3传输表征开始拆装模板的控制信号,反之,若检测到拆装工位上不存在预制构件51,则向驱动组件3传输表征停止拆装模板的控制信号;其中,开始拆装模板以及停止拆装模板的控制信号可以以数字量的形式进行区分,例如,可以令高电平的控制信号表示开始进行模板拆装,令低电平的控制信号表示停止进行模板拆装;控制信号也可以是以模拟量的形式进行区分。
46.驱动组件3接收到预制构件检控模块6所发出的控制信号之后,驱使连接组件4进行相应的移动控制;若控制信号表征开始拆装模板,驱动组件3控制连接组件4移动并可拆卸连接于侧模板52,将连接后的侧模板52从预制构件51的侧面上拆卸或者安装于底模板上的侧面,若控制信号表征停止拆装模板,驱动组件3控制连接组件4保持静止或者移动至初始位置。
47.由此,通过预制构件检控模块6对拆装工位上是否存在预制构件51进行检测,在检测到预制构件51的情况下通过驱动组件3自动控制连接组件4对预制构件51的模板进行拆装操作,此过程无需人力参与,节省了人力资源。
48.另外,本技术所涉及的电连接包括线路连接和无线连接。在线路连接下,各个模块之间导线连接并通过导线进行信号传输;在无线连接下,各个模块之间可通过无线信号发射端以及接收端进行信号传输,无线信号具体蓝牙连接信号、wifi连接信号和蜂窝网络连接信号等。
49.在一可实施方式中,参考图1所示,还包括多个预制构件承载台1;多个预制构件承载台1前后并排间隔布置。
50.本实施例中,预制构件承载台1具体为电动升降台,用于承载预制构件51,其数量根据预制构件51的重量或者长度而定。拆装工位具体位于预制构件承载台1的顶部,在预制构件51置于拆装工位的情况下,预制构件51上的侧模板52与连接组件4相对设置并平齐。
51.在一可实施方式中,参考图2所示,预制构件检控模块6包括预制构件检测模块61
和逻辑控制模块62;预制构件检测模块61电连接逻辑控制模块62,以检测拆装工位上是否存在预制构件51;逻辑控制模块62电连接驱动组件3,以指示驱动组件3对连接组件4进行移动控制。
52.本实施例中,预制构件检测模块61具体可以是通过压力检测的方式或者距离范围检测的方式来判断拆装工位上是否存在预制构件51,向逻辑控制模块62传输表征判断结果的检测信号,检测信号同样可以以数字量形式区分判断结果,例如以高电平的检测信号表示拆装工位上存在预制构件51,低电平的检测信号表示拆装工位上不存在预制构件51;检测信号也可以以模拟量的形式表示,例如检测信号的信号值在低于特定信号值的情况下表示拆装工位上不存在预制构件51,在高于特定信号的情况下表示拆装工位上存在预制构件51。
53.逻辑控制模块62为可编程逻辑控制器plc、微控制单元mcu和中央处理器cpu中的至少一种,接收预制构件检测模块61所传输的检测信号,根据检测信号向驱动组件3发送相应的控制信号;具体的,在检测信号为数字量的情况下,逻辑控制模块62根据检测信号的高低电平向驱动组件3发送相应的控制信号;在检测信号为模拟量的情况下,逻辑控制模块62将检测信号的信号值与预先存储的特定信号值进行比对,根据比对结果向驱动组件3发送相应的控制信号。
54.驱动组件3接收到控制信号之后,对连接组件4进行相应的移动控制。
55.在一可实施方式中,参考图3所示,预制构件检测模块61包括压力传感器611和比较器612;压力传感器611安装于拆装工位;比较器612电连接压力传感器611以及逻辑控制模块62。
56.本实施例中,压力传感器611具体安装在拆装工位与预制构件51的接触面上,通过接触面的形变程度生成对应的压力信号并将压力信号传输至比较器612。
57.比较器612用于将压力信号与自身所设置的第一预设值进行大小比较,其中,第一预设值可预先通过比较器612中相关元器件的参数进行调节,当压力信号值超过第一预设值时,表示预制构件51已经位于拆装工位上,比较器612生成对应的检测信号并将检测信号传输至逻辑控制模块62。
58.在一可实施方式中,参考图4所示,预制构件检测模块61为距离传感器613;距离传感器613安装于固定架2,以在预定的距离范围内检测拆装工位上是否存在预制构件51。
59.本实施例中,距离传感器613具体安装固定架2朝向拆装工位的侧面上,距离传感器613设有预定的距离范围,距离范围根据距离传感器613自身的元器件的参数而决定。逻辑控制模块62根据距离范围内是否存在预制构件51向逻辑控制模块62传输相应的距离检测信号,该距离检测信号可以是以数字量的形式表示。
60.在一可实施方式中,参考图5所示,驱动组件3包括移动架31、第一驱动件32和第二驱动件33;连接组件4活动安装于移动架31;移动架31活动安装于固定架2;第一驱动件32电连接预制构件检控模块6,第一驱动件32安装于固定架2且连接于移动架31,以使连接组件4往靠近或远离预制构件51上的侧模板52的方向移动;第二驱动件33电连接预制构件检控模块6,第二驱动件33安装于移动架31且连接于连接组件4,以使连接组件4沿预制构件51上的侧模板52长度方向移动连接侧模板52。
61.本实施例中,移动架31具体通过滑轨滑块安装于固定架2,其中,滑轨的安装方向
优选垂直于预制构件51的侧面。
62.连接组件4具体安装于移动架31靠近预制构件51上的侧模板52一侧,在移动架31的移动过程中靠近或者远离预制构件51上的侧模板52。
63.具体的,第一驱动件32和第二驱动件33均电连接预制构件检控模块6的逻辑控制模块62,在逻辑控制模块62的控制信号下分别执行移动操作。
64.第一驱动件32具体可以是电动气缸、电动油缸或直线电机;在第一驱动件32为电动气缸或电动油缸的情况下,其缸体安装于固定架2,伸缩杆连接于移动架31并且伸缩杆的伸缩方向与滑轨的安装方向一致;在第一驱动件32为直线电机的情况下,其机身安装于固定架2,输出轴连接于移动架31并且输出轴的移动方向与滑轨的安装方向一致。当第一驱动件32运行时,带动移动架31以及连接组件4往靠近或者远离预制构件51上的侧模板52的方向移动。
65.第二驱动件33具体可以是电动气缸、电动油缸或直线电机;在第二驱动件33为电动气缸或电动油缸的情况下,其缸体安装于移动架31,伸缩杆连接于连接组件4并且伸缩杆的伸缩方向与预制构件51上的侧模板52长度方向一致;在第二驱动件33为直线电机的情况下,其机身安装于移动架31,输出轴连接于连接组件4并且输出轴的移动方向与预制构件51上的侧模板52长度方向一致。当第二驱动件33运行时,带动连接组件4朝预制构件51上的侧模板52长度方向移动。具体的,伸缩杆或输出轴带动连接组件4移动时,连接组件4与侧模板52挂接或卡接在一起。
66.第一驱动件32的驱动方向和第二驱动件33的驱动方向相垂直,减少侧模板52的运行路程,提高侧模板52运行稳定性。
67.在一可实施方式中,固定架2内设有容纳腔7;在驱动组件3未对连接组件4进行移动控制的情况下,驱动组件3和连接组件4位于容纳腔7内。
68.本实施例中,在驱动组件3未对连接组件4进行移动控制的情况下,驱动组件3以及连接组件4将收拢在容纳腔7内,此时,固定架2可对于驱动组件3以及连接组件4起到保护的作用。
69.在一可实施方式中,连接组件4包括导杆41和连接件42;导杆41活动安装于移动架31并连接第二驱动件33;连接件42安装于导杆41,以在预制构件51的侧面拆装侧模板52。
70.本实施例中,导杆41穿设安装在移动架31侧面的凸台,并活动安装在移动架31上,其长度方向与预制构件51上的侧模板52方向一致。导杆41的数量可以一个或者多个,在导杆41数量为多个的情况下,多个导杆41上下间隔布置,通过若干个连接杆相互固定。
71.连接件42的数量根据侧模板52上连接结构的数量决定;在侧模板52的外侧面上间隔设置多个连接结构的情况下,多个连接件42沿侧模板52的长度间隔固定于导杆41,以对应于多个连接结构。
72.连接件42的结构与同样与侧模板52上的连接结构相对应,在连接结构为安装孔的情况下,连接件42的结构具体可以是夹钩。
73.综上所述,在压力传感器611或者距离传感器613检测到拆装工位上存在预制构件51的情况下,逻辑控制模块62可控制连接组件4进行侧模板52的安装或者拆卸。
74.其中,拆卸侧模板52的具体控制过程可以为:逻辑控制模块62控制第一驱动件32带动连接件42往靠近侧模板52的方向移动,此时连接件42与侧模板52上的连接结构错开,
逻辑控制模块62控制第二驱动件33带动导杆41以及连接件42往侧模板52上的连接结构方向移动,以将连接件42连接至侧模板52的连接结构上,最后逻辑控制模块62控制第一驱动件32往远离侧模板52的方向移动,以使侧模板52脱离于预制构件51。
75.安装侧模板52的具体控制过程可以为:预先通过人工的方式将侧模板52连接于连接件42上,逻辑控制模块62控制第二驱动件33件往底模长度方向移动,以将侧模板52与底模对齐,逻辑控制模块62控制第一驱动件32带动移动架31朝接近底模方向移动,以将侧模板52移动至预定位置进行安装。
76.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
77.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
78.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。