技术特征:
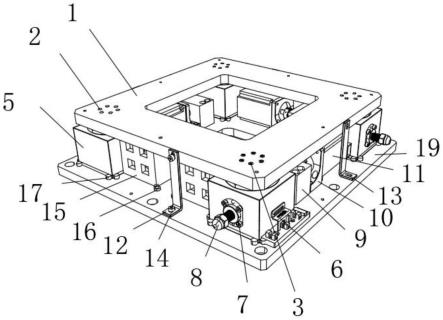
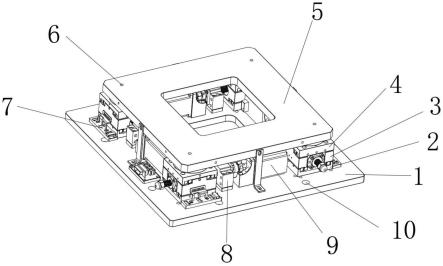
1.三轴平面机器人,包括上板(1),其特征在于:所述上板(1)四端下部均通过第一螺丝(3)螺纹连接有固定盘(4),所述固定盘(4)下端均固定连接有机体(5),所述机体(5)一侧均固定连接有感应片(6),所述机体(5)前端均固定连接有螺纹盘(7),所述螺纹盘(7)内插设有螺纹柱(8),所述机体(5)下端四周均固定连接有第二固定孔(17),所述第二固定孔(17)内均通过第一螺丝(3)螺纹连接有下板(19),所述机体(5)后端均设置有控制器(9),所述控制器(9)后端均设置有固定块(10),所述螺纹柱(8)后端固定连接在电机(11)驱动端,所述上板(1)四侧均设置有固定槽(13),所述下板(19)顶端四端均设置有固定槽(13),所述固定槽(13)内均通过第二螺丝(14)螺纹连接有固定片(12),所述下板(19)前侧上端设置有风机(15),所述风机(15)下部四端均固定连接有第一固定孔(16),所述第一固定孔(16)均通过第一螺丝(3)螺纹连接有下板(19)。2.根据权利要求1所述的三轴平面机器人,其特征在于:所述上板(1)内四端均设置有螺槽(2),所述螺槽(2)内均螺纹连接有第一螺丝(3)。3.根据权利要求1所述的三轴平面机器人,其特征在于:所述螺纹柱(8)外依次套设有螺纹盘(7)、机体(5)、控制器(9)和固定块(10)。4.根据权利要求1所述的三轴平面机器人,其特征在于:所述控制器(9)、固定块(10)和电机(11)均通过第一螺丝(3)螺纹连接在下板(19)上。5.根据权利要求1所述的三轴平面机器人,其特征在于:所述下板(19)后端顶壁上固定连接有连接块(18)。6.根据权利要求1所述的三轴平面机器人,其特征在于:所述固定片(12)为l型。7.根据权利要求1所述的三轴平面机器人,其特征在于:所述固定片(12)设置有四个。8.根据权利要求1所述的三轴平面机器人,其特征在于:所述风机(15)设置有两个。
技术总结
本实用新型涉及三轴机器人领域,公开了三轴平面机器人,包括上板,所述上板四侧均设置有固定槽,所述下板顶端四端均设置有固定槽,所述固定槽内均通过第二螺丝螺纹连接有固定片,所述下板前侧上端设置有风机,所述风机下部四端均固定连接有第一固定孔,所述第一固定孔均通过第一螺丝螺纹连接有下板。本实用新型中,通过上板四侧均设置有固定槽,下板顶端四端均设置有固定槽,固定槽内均通过第二螺丝螺纹连接有固定片的结构,实现了可以通过固定片对上板和下板进行固定的目的,通过下板前侧上端设置有风机,风机下部四端均固定连接有第一固定孔,第一固定孔均通过第一螺丝螺纹连接有下板的结构,实现了为三轴平面机器人散热的目的。的。的。
技术研发人员:李标 尹栋 刘炜
受保护的技术使用者:深圳市四元数数控技术有限公司
技术研发日:2022.09.28
技术公布日:2023/2/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。