1.本实用新型涉及无人搬运小车,特别涉及一种无人搬运小车。
背景技术:
2.无人搬运车,指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源。一般可透过电脑来控制其行进路线以及行为。
3.现有的无人搬运小车在使用时存在一定的弊端,首先,现有的无人搬运小车在使用时不方便调节小车高度,不能满足多种情况下无人搬运车的使用需求,其次,现有的无人搬运小车不方便将承载的货物进行卸载,不方便无人搬运小车的使用。
技术实现要素:
4.本实用新型的主要目的在于提供一种无人搬运小车,解决了现有的无人搬运小车在使用时不方便调节小车高度,不能满足多种情况下无人搬运车的使用需求,现有的无人搬运小车不方便将承载的货物进行卸载,不方便无人搬运小车的使用的问题。
5.为实现上述目的,本实用新型采取的技术方案为:
6.一种无人搬运小车,包括有底座,所述底座的中间固定连接有固定电机,所述固定电机的两侧均活动连接有传动齿轮,两个所述传动齿轮的下方均齿接有第一齿板,两个所述传动齿轮的上方均齿接有第二齿板,所述底座的两侧均固定连接有控制盒,两个所述第一齿板均与相邻的第二齿板活动于控制盒内,两个所述第一齿板的外侧均固定连接有第一固定杆,两个所述控制盒的外侧均开设有第一固定槽,且两个所述第一固定杆分别活动于临近的第一固定槽内,两个所述第二齿板的外侧固定连接有第二固定杆,两个所述控制盒的外侧均开设有第二固定槽,且两个所述第二固定杆分别活动于临近的第二固定槽内,两个所述第一固定杆的外侧均套接有第一传动杆,两个所述第二固定杆的外侧均套接有第二传动杆,两个所述第一传动杆的一端均套接有第三固定杆,两个所述第二传动杆的一端均套接有第四固定杆,两个所述第三固定杆之间固定连接有置物板,且两个所述第四固定杆的一端均与置物板固定连接。
7.进一步的,所述置物板的上方固定连接有固定支架,所述固定支架的两侧均开设有限位槽,所述置物板的上方两侧均固定连接有第三齿板,两个所述第三齿板的上方均齿接有第一齿轮,两个所述第一齿轮中间固定连接有第一限位杆,两个所述第一齿轮的外侧均固定连接有第二限位杆,两个所述第二限位杆分别活动于两个限位槽,两个所述第二限位杆的外侧均固定连接有第一挡板。
8.进一步的,两个所述第一齿轮的一侧均齿接有第二齿轮,两个所述第二齿轮之间固定连接有电动杆,两个所述电动杆之间活动连接有第一电机,所述第一电机的一侧套接着第一限位杆,两个所述第二齿轮的外侧均固定连接有第三限位杆,且两个所述第三限位杆分别活动于限位槽内,两个所述第三限位杆的外侧均固定连接有第二挡板。
9.进一步的,所述固定支架的一侧固定连接有第二电机,所述第二电机的一端活动连接有连接杆。
10.进一步的,所述连接杆的一侧固定连接有翻板,所述翻板的一侧两端均固定连接有转轴,两个所述转轴的外侧均套接有固定块,两个所述固定块的一侧均固定连接着固定支架。
11.进一步的,所述底座的两侧下方均活动连接有两个跑轮,两个所述控制盒的两侧均固定连接有挡块。
12.与现有技术相比,本实用新型具有如下有益效果:
13.1、本实用新型通过传动齿轮的设置,方便了调节无人搬运选车高度,启动固定电机,固定电机带动传动齿轮旋转,传动齿轮带动第一齿板运动,第一齿板通过第一固定杆带动第一传动杆运动,直至第一传动杆的一侧抵接着挡块,传动齿轮带动第二齿板运动,第二齿板通过第二固定杆带动第二传动杆运动,直至第二传动杆的一侧抵接着挡块,此时第一传动杆和第二传动杆经过运动后状态与地面形成竖直,第一传动杆和第二传动杆通过第三固定杆和第四固定杆带动置物板提高高度,通过这样的设置,满足了多种情况下无人搬运车的使用需求,同时增加了无人搬运小车的承载能力。
14.2、本实用新型通过第一电机的设置,方便了将无人搬运小车上的货物卸载,启动第一电机,第一电机通过电动杆带动第二齿轮旋转,第二齿轮带动齿接的第一齿轮旋转,因第一齿轮两侧的第二限位杆活动于限位槽内,所述第一齿轮通过齿板受力后只会沿限位槽运动,第一齿轮运动带动套接的第一电机运沿限位槽运动,运动的第一电机可以推动置物板上装载的货物离开置物板,通过这样的设置,方便了将无人搬运小车承载的货物进行卸载,方便了无人搬运小车的使用。
15.3、本实用新型通过第二电机的设置,方便了将无人搬运车抬起进行卸载货物,启动第二电机,第二电机带动连接杆旋转,连接杆带动翻板旋转,因翻板的一侧固定连接的转轴套接在固定块内,固定块与固定支架固定连接,所以翻板可以以转轴为轴心旋转,旋转翻板直至翻板与地面接触将无人搬运车带动到一个需要的角度,通过这样的设置,方便了将无人搬运车抬起进行卸载货物。
16.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
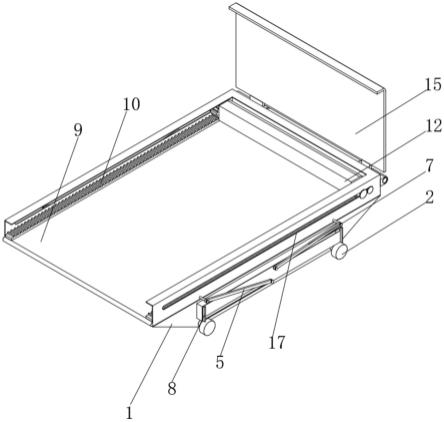
17.图1为本实用新型一种无人搬运小车的没有提高高度状态的一个角度的整体结构示意图。
18.图2为本实用新型一种无人搬运小车的没有提高高度状态的另一个角度的整体结构示意图。
19.图3为本实用新型一种无人搬运小车的控制盒的部分结构示意图。
20.图4为本实用新型一种无人搬运小车的提高高度状态的部分结构示意图。
21.图5为本实用新型一种无人搬运小车的齿板的部分结构的放大示意图。
22.图6为本实用新型一种无人搬运小车的翻板落地状态的部分结构示意图。
23.图中:1、底座;2、跑轮;3、传动齿轮;4、第一齿板;5、第一传动杆;6、第二齿板;7、第二传动杆;8、挡块;9、置物板;10、第三齿板;11、第一齿轮;12、第一电机;13、第二齿轮;14、
第二电机;15、翻板;16、连接杆;17、限位槽。
具体实施方式
24.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
25.如图1-图4所示,一种无人搬运小车,包括有底座1,底座1的中间固定连接有固定电机,固定电机的两侧均活动连接有传动齿轮3,两个传动齿轮3的下方均齿接有第一齿板4,两个传动齿轮3的上方均齿接有第二齿板6,底座1的两侧均固定连接有控制盒,两个第一齿板4均与相邻的第二齿板6活动于控制盒内,两个第一齿板4的外侧均固定连接有第一固定杆,两个控制盒的外侧均开设有第一固定槽,且两个第一固定杆分别活动于临近的第一固定槽内,两个第二齿板6的外侧固定连接有第二固定杆,两个控制盒的外侧均开设有第二固定槽,且两个第二固定杆分别活动于临近的第二固定槽内,两个第一固定杆的外侧均套接有第一传动杆5,两个第二固定杆的外侧均套接有第二传动杆7,两个第一传动杆5的一端均套接有第三固定杆,两个第二传动杆7的一端均套接有第四固定杆,两个第三固定杆之间固定连接有置物板9,且两个第四固定杆的一端均与置物板9固定连接,通过采用上述技术方案,启动固定电机,固定电机带动传动齿轮3旋转,传动齿轮3带动第一齿板4运动,第一齿板4通过第一固定杆带动第一传动杆5运动,直至第一传动杆5的一侧抵接着挡块8,传动齿轮3带动第二齿板6运动,第二齿板6通过第二固定杆带动第二传动杆7运动,直至第二传动杆7的一侧抵接着挡块8,此时第一传动杆5和第二传动杆7经过运动后状态与地面形成竖直,第一传动杆5和第二传动杆7通过第三固定杆和第四固定杆带动置物板9提高高度,通过这样的设置,满足多种情况下无人搬运车的使用需求,同时增加了无人搬运小车的承载能力。
26.如图1、图5所示,置物板9的上方固定连接有固定支架,固定支架的两侧均开设有限位槽17,置物板9的上方两侧均固定连接有第三齿板10,两个第三齿板10的上方均齿接有第一齿轮11,两个第一齿轮11中间固定连接有第一限位杆,两个第一齿轮11的外侧均固定连接有第二限位杆,两个第二限位杆分别活动于两个限位槽17,两个第二限位杆的外侧均固定连接有第一挡板,通过采用上述技术方案,第一齿轮11可以沿齿接的齿板运动,因第一齿轮11两侧的第一限位杆活动于限位槽17内,所以第一齿轮11只能沿限位槽17运动。
27.如图1、图5所示,两个第一齿轮11的一侧均齿接有第二齿轮13,两个第二齿轮13之间固定连接有电动杆,两个电动杆之间活动连接有第一电机12,第一电机12的一侧套接着第一限位杆,两个第二齿轮13的外侧均固定连接有第三限位杆,且两个第三限位杆分别活动于限位槽17内,两个第三限位杆的外侧均固定连接有第二挡板,通过采用上述技术方案,启动第一电机12,第一电机12通过电动杆带动第二齿轮13旋转,第二齿轮13带动齿接的第一齿轮11旋转,因第一齿轮11两侧的第二限位杆活动于限位槽17内,第一齿轮11通过齿板受力后只会沿限位槽17运动,第一齿轮11运动带动套接的第一电机12运沿限位槽17运动,运动的第一电机12可以推动置物板9上装载的货物离开置物板9,通过这样的设置,方便了将无人搬运小车承载的货物进行卸载,方便了无人搬运小车的使用。
28.如图5-图6所示,固定支架的一侧固定连接有第二电机14,第二电机14的一端活动连接有连接杆16,通过采用上述技术方案,第二电机14可以带动连接杆16转动。
29.如图5-图6所示,述连接杆16的一侧固定连接有翻板15,翻板15的一侧两端均固定连接有转轴,两个转轴的外侧均套接有固定块,两个固定块的一侧均固定连接着固定支架,通过采用上述技术方案,启动第二电机14,第二电机14带动连接杆16旋转,连接杆16带动翻板15旋转,因翻板15的一侧固定连接的转轴套接在固定块内,固定块与固定支架固定连接,所以翻板15可以以转轴为轴心旋转,旋转翻板15直至翻板15与地面接触将无人搬运车带动到一个需要的角度,通过这样的设置,方便了将无人搬运车抬起进行卸载货物,同时翻板15还能够承载更多货物。
30.如图1-图6所示,底座1的两侧下方均活动连接有两个跑轮2,两个控制盒的两侧均固定连接有挡块8,通过采用上述技术方案,底座1通过下方的跑轮2带动无人搬运小车运动。
31.需要说明的是,在使用时,将底座1下方的跑轮2放置在水平地面上,在植物板上放置货物进行搬运。
32.当需要调节无人搬运小车高度时,启动固定电机,固定电机带动传动齿轮3旋转,传动齿轮3带动第一齿板4运动,第一齿板4通过第一固定杆带动第一传动杆5运动,直至第一传动杆5的一侧抵接着挡块8,传动齿轮3带动第二齿板6运动,第二齿板6通过第二固定杆带动第二传动杆7运动,直至第二传动杆7的一侧抵接着挡块8,此时第一传动杆5和第二传动杆7经过运动后状态与地面形成竖直,第一传动杆5和第二传动杆7通过第三固定杆和第四固定杆带动置物板9提高高度,同时可以在底座1上方放置货物。
33.当需要卸载货物时,启动第二电机14,第二电机14带动连接杆16旋转,连接杆16带动翻板15旋转,因翻板15的一侧固定连接的转轴套接在固定块内,固定块与固定支架固定连接,所以翻板15可以以转轴为轴心旋转,旋转翻板15直至翻板15与地面接触将无人搬运车带动到一个需要的角度,启动第一电机12,第一电机12通过电动杆带动第二齿轮13旋转,第二齿轮13带动齿接的第一齿轮11旋转,因第一齿轮11两侧的第二限位杆活动于限位槽17内,第一齿轮11通过齿板受力后只会沿限位槽17运动,第一齿轮11运动带动套接的第一电机12运沿限位槽17运动,运动的第一电机12可以推动置物板9上装载的货物离开置物板9。
34.本实用新型提供了一种无人搬运小车,解决了现有的无人搬运小车在使用时不方便调节小车高度,不能满足多种情况下无人搬运车的使用需求,现有的无人搬运小车不方便将承载的货物进行卸载,不方便无人搬运小车的使用的问题,较为实用。
35.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。