1.本实用新型涉及平衡机技术领域,具体为一种高精度激光自动去重平衡机。
背景技术:
2.平衡机是一种高精度激光自动去重平衡机测定转子不平衡量,根据测量结果对转子的不平衡量进行校正,使转子旋转时产生的振动或作用于轴承上的振动减少到允许的范围内,以达到减少振动、改善性能和提高产品质量目的仪器,平衡机的使用范围也非常的广泛。
3.平衡机在将工件放置完成后,需要对工件进行旋转激光去重,然而,当工件旋转过程中,工件容易出现掉落,影响对工件的去重,因此,需要对工件本体进行抵紧,通常情况下的平衡机在对工件进行抵紧时往往较为繁琐,从而容易导致避免了平衡机使用过程中出现工件本体掉落的现象。
4.通常平衡机在使用时为了保证去重的均匀性,避免出现重复去重,需要对工件本体进行旋转去重,一些平衡机并不具备旋转去重的功能,则容易导致平衡机使用过程中出现重复去重的现象,同时,降低了平衡机使用时的去重效率;平衡机在对工件进行加工过程中,会产生一些烟气,这些烟气对操作人员与环境会造成不利的影响,因此,需要对烟气进行收集并集中处理,这一功能大多数平衡机并不具备,这就容易导致平衡机使用过程中产生的烟气对工作人员和环境造成不利的影响。
技术实现要素:
5.本实用新型的目的在于提供一种高精度激光自动去重平衡机,以解决上述背景技术中提出平衡机使用时不能对工件本体进行抵紧,不能进行旋转去重,以及不能对烟气进行收集并集中处理的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种高精度激光自动去重平衡机,包括支撑架,所述支撑架顶部位置处的表面固定有箱体,所述支撑架的表面固定有控制按钮,所述箱体的内部安装有操作台,且操作台位于激光场镜的下方,并且操作台的表面皆设置有放置架,所述支撑架的表面设置有烟气处理机构,且烟气处理机构的内部包含有出气管、收集框与处理部,所述放置架的表面设置有抵紧机构,且抵紧机构由转动电机、固定块与抵紧部构成,所述放置架的表面设置有旋转机构,且旋转机构的内部包含有主动齿轮、从动齿轮与旋转部。
7.优选的,所述箱体的表面铰接有透明罩,所述箱体的表面铰接有门体,且门体位于透明罩的下方,所述箱体的内部安装有激光光路,且激光光路的表面安装有激光振镜,并且激光振镜的底部安装有激光场镜,所述激光光路的底部安装有焦距调整模组,所述激光光路的底部安装有激光发射器,且激光发射器的输入端与控制按钮的输出端电性连接。
8.优选的,所述放置架底部位置处的表面皆安装有滑块,且滑块与操作台相互滑动配合,并且操作台的皆表面螺纹连接有螺钉,同时,螺钉的一端贯穿放置架操作台并与滑块
的表面螺纹紧固,所述放置架的表面皆安装有振动传感器。
9.优选的,所述处理部的内部包含有净化网、过滤网、框体与鼓风机,所述支撑架的表面安装有框体,且框体的内部设置有用于收集烟气的收集框,所述收集框的内部固定有净化网,所述收集框的内部安装有过滤网,且过滤网位于净化网的上方,所述框体顶部位置处的表面安装有鼓风机,且鼓风机的输入端与控制按钮的输出端电性连接,并且鼓风机的输入端延伸至箱体的内部,同时,鼓风机的输入端延伸至框体的内部,所述框体的表面安装有出气管,且出气管的一端贯穿框体并延伸至收集框的内部。
10.优选的,所述抵紧部的内部包含有抵紧板与电动推杆,所述放置架的表面安装有固定块,且固定块的表面安装有转动电机,并且转动电机的输入端与控制按钮的输出端电性连接,所述转动电机的输出端通过联轴器安装有转轴,所述固定块的表面设置有转板,且转板与固定块相互转动配合,并且转板的表面与转轴的表面相固定,所述电动推杆安装在转板底部位置处的表面,且电动推杆的输入端与控制按钮的输出端电性连接,所述电动推杆的输出端安装有抵紧板,且抵紧板的表面与工件本体的表面相贴合。
11.优选的,所述旋转部的内部包含有驱动电机、连接轴与转柱,所述放置架的表面安装有驱动电机,且驱动电机的输入端与控制按钮的输出端电性连接,所述驱动电机的输出端通过联轴器固定有连接轴,且连接轴的表面安装有主动齿轮,所述放置架的表面设置有从动齿轮,且从动齿轮与主动齿轮相互啮合,所述从动齿轮中心位置处的表面安装有转柱,且转柱的一端贯穿放置架并通过螺钉与工件本体的表面相固定。
12.与现有技术相比,本实用新型的有益效果是:该高精度激光自动去重平衡机不仅避免了平衡机使用过程中出现工件本体掉落的现象,避免了平衡机使用过程中出现重复去重的现象,同时,提高了平衡机使用时的去重效率,而且避免了平衡机使用过程中产生的烟气对工作人员和环境造成不利的影响;
13.1、通过设置有抵紧机构,控制固定块表面的转动电机工作,在转动电机的作用下带动转轴转动,从而带动转板在固定块的表面转动,使得转板转动至工件本体的上方,随后,操作控制按钮,使控制按钮控制电动推杆工作,在电动推杆的作用下带动抵紧板向下运动,从而带动抵紧板运动至与工件本体的表面相贴合,在抵紧板的作用下对工件本体进行抵紧,避免工件本体在调节转动时出现掉落,实现了平衡机对工件本体的抵紧功能,从而避免了平衡机使用过程中出现工件本体掉落的现象;
14.2、通过设置有旋转机构,控制驱动电机工作,在驱动电机的作用下带动连接轴转动,从而带动主动齿轮转动,在主动齿轮与从动齿轮的啮合作用下带动从动齿轮转动,从而带动转柱转动,在转柱的作用下带动工件本体在放置架的表面转动,对工件本体进行旋转去重,实现了平衡机对工件本体旋转去重的功能,从而避免了平衡机使用过程中出现重复去重的现象,同时,提高了平衡机使用时的去重效率;
15.3、通过设置有烟气处理机构,控制鼓风机工作,在鼓风机的作用下将箱体内部的烟气吸至框体的内部,烟尘进入收集框的内部,在收集框内部过滤网的作用下对烟气进行过滤处理,在净化网的作用下对烟气进行净化处理,处理完成后的烟气通过出气管排出收集框的内部,实现了平衡机收集烟气的功能,从而避免了平衡机使用过程中产生的烟气对工作人员和环境造成不利的影响。
附图说明
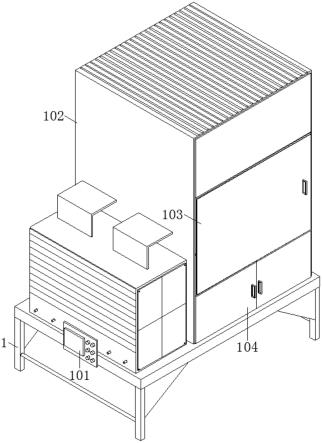
16.图1为本实用新型的三维立体结构示意图;
17.图2为本实用新型的主视剖面结构示意图;
18.图3为本实用新型的图2中抵紧机构的放大结构示意图;
19.图4为本实用新型的图2中旋转机构的放大结构示意图。
20.图中:1、支撑架;101、控制按钮;102、箱体;103、透明罩;104、门体;105、放置架;106、工件本体;107、激光场镜;108、激光振镜;109、激光光路;110、激光发射器;111、焦距调整模组;2、烟气处理机构;201、出气管;202、收集框;203、处理部;2031、净化网;2032、过滤网;2033、框体;2034、鼓风机;3、抵紧机构;301、转动电机;302、固定块;303、抵紧部;3031、抵紧板;3032、电动推杆;4、旋转机构;401、主动齿轮;402、从动齿轮;403、旋转部;4031、驱动电机;4032、连接轴;4033、转柱。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,此外,术语“第一”、“第二”、“第三”“上、下、左、右”等仅用于描述目的,而不能理解为指示或暗示相对重要性。同时,在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电性连接;可以是直接相连,也可以通过中间媒介间接相连,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.本实用新型提供的一种高精度激光自动去重平衡机的结构如图1和图2所示,包括支撑架1,支撑架1顶部位置处的表面固定有箱体102,支撑架1的表面固定有控制按钮101,该控制按钮101的型号可选用la系列,箱体102的表面铰接有透明罩103,箱体102的表面铰接有门体104,且门体104位于透明罩103的下方,箱体102的内部安装有激光光路109,且激光光路109的表面安装有激光振镜108,并且激光振镜108的底部安装有激光场镜107,激光光路109的底部安装有焦距调整模组111,激光光路109的底部安装有激光发射器110,且激光发射器110的输入端与控制按钮101的输出端电性连接,箱体102的内部安装有操作台,且操作台位于激光场镜107的下方,并且操作台的表面皆设置有放置架105,放置架105底部位置处的表面皆安装有滑块,且滑块与操作台相互滑动配合,并且操作台的皆表面螺纹连接有螺钉,同时,螺钉的一端贯穿放置架105操作台并与滑块的表面螺纹紧固,放置架105的表面皆安装有振动传感器。
23.进一步地,如图2所示,支撑架1的表面设置有烟气处理机构2,且烟气处理机构2的内部包含有出气管201、收集框202与处理部203,并且处理部203的内部包含有净化网2031、过滤网2032、框体2033与鼓风机2034,支撑架1的表面安装有框体2033,且框体2033的内部设置有用于收集烟气的收集框202,收集框202的内部固定有净化网2031,收集框202的内部安装有过滤网2032,且过滤网2032位于净化网2031的上方,框体2033顶部位置处的表面安装有鼓风机2034,该鼓风机2034的型号可选用vfc系列,且鼓风机2034的输入端与控制按钮101的输出端电性连接,并且鼓风机2034的输入端延伸至箱体102的内部,同时,鼓风机2034
的输入端延伸至框体2033的内部,框体2033的表面安装有出气管201,且出气管201的一端贯穿框体2033并延伸至收集框202的内部。
24.实施时,控制鼓风机2034工作,在鼓风机2034的作用下将箱体102内部的烟气吸至框体2033的内部,烟尘进入收集框202的内部,在收集框202内部过滤网2032的作用下对烟气进行过滤处理,在净化网2031的作用下对烟气进行净化处理,处理完成后的烟气通过出气管201排出收集框202的内部,以实现平衡机收集烟气的功能。
25.进一步地,如图2和图3所示,放置架105的表面设置有抵紧机构3,且抵紧机构3由转动电机301、固定块302与抵紧部303构成,并且抵紧部303的内部包含有抵紧板3031与电动推杆3032,放置架105的表面安装有固定块302,且固定块302的表面安装有转动电机301,该转动电机301的型号可选用jo系列,并且转动电机301的输入端与控制按钮101的输出端电性连接,转动电机301的输出端通过联轴器安装有转轴,固定块302的表面设置有转板,且转板与固定块302相互转动配合,并且转板的表面与转轴的表面相固定,电动推杆3032安装在转板底部位置处的表面,该电动推杆3032的型号可选用dg系列,且电动推杆3032的输入端与控制按钮101的输出端电性连接,电动推杆3032的输出端安装有抵紧板3031,且抵紧板3031的表面与工件本体106的表面相贴合。
26.实施时,控制固定块302表面的转动电机301工作,在转动电机301的作用下带动转轴转动,从而带动转板在固定块302的表面转动,使得转板转动至工件本体106的上方,随后,操作控制按钮101,使控制按钮101控制电动推杆3032工作,在电动推杆3032的作用下带动抵紧板3031向下运动,从而带动抵紧板3031运动至与工件本体106的表面相贴合,在抵紧板3031的作用下对工件本体106进行抵紧,避免工件本体106在调节转动时出现掉落,以实现平衡机对工件本体106的抵紧功能。
27.进一步地,如图2和图4所示,放置架105的表面设置有旋转机构4,且旋转机构4的内部包含有主动齿轮401、从动齿轮402与旋转部403,并且旋转部403的内部包含有驱动电机4031、连接轴4032与转柱4033,放置架105的表面安装有驱动电机4031,该驱动电机4031的型号可选用jo系列,且驱动电机4031的输入端与控制按钮101的输出端电性连接,驱动电机4031的输出端通过联轴器固定有连接轴4032,且连接轴4032的表面安装有主动齿轮401,放置架105的表面设置有从动齿轮402,且从动齿轮402与主动齿轮401相互啮合,从动齿轮402中心位置处的表面安装有转柱4033,且转柱4033的一端贯穿放置架105并通过螺钉与工件本体106的表面相固定。
28.实施时,控制驱动电机4031工作,在驱动电机4031的作用下带动连接轴4032转动,从而带动主动齿轮401转动,在主动齿轮401与从动齿轮402的啮合作用下带动从动齿轮402转动,从而带动转柱4033转动,在转柱4033的作用下带动工件本体106在放置架105的表面转动,对工件本体106进行旋转去重,以实现平衡机对工件本体106旋转去重的功能。
29.工作原理:使用时,首先将支撑架1放置于指定位置处,打开透明罩103,将工件本体106放置于相邻放置架105之间,随后,拧松操作台表面的螺钉,再拉动放置架105,根据工件本体106的直径调节放置架105之间的距离,随后,再拧紧螺钉,从而将放置架105与操作台固定住,将工件本体106放置于放置架105的表面,随后,当工件本体106在放置架105的表面转动时,为了避免工件本体106出现掉落,此时,操作控制按钮101,使控制按钮101控制固定块302表面的转动电机301工作,在转动电机301的作用下带动转轴转动,从而带动转板在
固定块302的表面转动,使得转板转动至工件本体106的上方,随后,操作控制按钮101,使控制按钮101控制电动推杆3032工作,在电动推杆3032的作用下带动抵紧板3031向下运动,从而带动抵紧板3031运动至与工件本体106的表面相贴合,在抵紧板3031的作用下对工件本体106进行抵紧,避免工件本体106在调节转动时出现掉落,以实现平衡机对工件本体106的抵紧功能,从而避免了平衡机使用过程中出现工件本体106掉落的现象。
30.随后,再操作控制按钮101,使控制按钮101控制驱动电机4031工作,在驱动电机4031的作用下带动连接轴4032转动,从而带动主动齿轮401转动,在主动齿轮401与从动齿轮402的啮合作用下带动从动齿轮402转动,从而带动转柱4033转动,在转柱4033的作用下带动工件本体106在放置架105的表面转动,对工件本体106进行旋转去重,以实现平衡机对工件本体106旋转去重的功能,从而避免了平衡机使用过程中出现重复去重的现象,同时,提高了平衡机使用时的去重效率。
31.随后,在工件本体106旋转的过程中,振动传感器采集工件本体106两面的振动数据,后经上位机程序测算出工件本体106两面的不平衡量大小及角度(整个过程大约需要三到四秒,随后根据程序测量的数据,带动工件本体106将需要去重的位置旋转到激光场镜107的正下方,由激光进行灼烧去重,因为激光的扫射面积为一百mmx乘以一百mm,所以整个过程中激光不需要移动,节约时间。
32.在对工件本体106去重过程中,会产生一些烟尘,此时,操作控制按钮101,使控制按钮101控制鼓风机2034工作,在鼓风机2034的作用下将箱体102内部的烟气吸至框体2033的内部,烟尘进入收集框202的内部,在收集框202内部过滤网2032的作用下对烟气进行过滤处理,在净化网2031的作用下对烟气进行净化处理,处理完成后的烟气通过出气管201排出收集框202的内部,以实现平衡机收集烟气的功能,从而避免了平衡机使用过程中产生的烟气对工作人员和环境造成不利的影响,去重完成后,拧松转柱4033表面的螺钉,使工件本体106经过复测合格后拿出即可,最终完成平衡机的使用工作。
33.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
