1.本实用新型属于越障技术领域,尤其涉及越障轮以及清洁机器人。
背景技术:
2.现有的清洁机器人的越障能力受限于行走轮的直径,即行走轮直径大则越障能力强,直径小,则越障能力弱,而清洁机器人在执行清洁任务时,机体不能离地面过远,否则将影响清洁机器人对地面垃圾清理的能力,因此行走轮的直径不能无限增大,因此,清洁机器人只能通过一些低矮障碍物,例如地毯等,而不能跨域门槛等较高的障碍物,导致清洁机器人在执行清洁任务时在空间上受到限制而产生一系列的衍生问题,例如由于室内的一些特殊空间(厨房、卫生间等)需要设置较高的门槛,而现有清洁机器人无法跨越这些空间,使得清洁机器人的基站只能设置在卧室或者客厅,而基站的设置需要在当前位置接入水源,导致施工困难以及增加用户的空间占用,客户使用体验差。
技术实现要素:
3.本实用新型提供的越障轮,旨在解决现有清洁机器人越障能力低导致在执行清洁任务时在空间上收到限制从而使得客户使用体验不佳的问题。
4.本实用新型是这样实现的,一种越障轮,应用于清洁机器人,包括:
5.面壳,其一侧设有连接柱,所述面壳用于与所述清洁机器人固定;
6.主动轮,套设于所述连接柱外并可相对所述连接柱转动;
7.伸缩杆,可伸缩地圆周均布于所述主动轮内;
8.第一弹性件,设于所述主动轮内并向所述伸缩杆提供缩回所述主动轮内的预紧力;
9.转动件,同轴可转动地设于所述主动轮内并与所述主动轮配合连接,所述转动件的圆周上设有与所述伸缩杆一一对应的突出部,所述伸缩杆位于所述突出部转动方向的一侧,所述转动件可与所述主动轮分离并与所述连接柱配合连接;
10.当所述转动件与所述连接柱配合连接时,所述伸缩杆的端部与所述突出部抵接,所述伸缩杆伸出所述主动轮外,所述转动件在所述伸缩杆伸出所述主动轮外后与所述连接柱分离并与所述主动轮配合连接。
11.进一步地,所述转动件可沿其轴线方向移动,所述转动件位于其轴线方向的相对两侧分别设有第一限位部和第二限位部,所述连接柱上设有可与所述第一限位部配合或者分离的第三限位部,所述主动轮的内壁设有可与所述第二限位部分离或者配合的第四限位部,所述越障轮还包括:
12.第二弹性件,设于所述主动轮内并对所述转动件提供所述第二限位部与所述第四限位部配合的预紧力;
13.第一驱动件,设于所述连接柱上并可驱动所述转动件向所述第三限位部方向移动以使所述第一限位部与所述第三限位部配合。
14.进一步地,所述第一限位部、所述第二限位部、所述第三限位部以及所述第四限位部均为绕转动轴的轴线周向设置的齿。
15.进一步地,所述第一驱动件为环状电磁铁,所述驱动件套设于转动轴上并且与所述连接柱固定,所述转动件朝向所述第一驱动件的一侧设有可被磁吸的磁吸部。
16.进一步地,所述伸缩杆可与所述突出部抵接的一端设有推动杆,所述推动杆在其转动方向的末端设有第五限位部,当所述伸缩杆伸出所述主动轮外时,所述突出部与所述第五限位部配合。
17.进一步地,所述突出部上设有滚轮,所述滚轮与所述推动杆抵接并可在所述推动杆上滚动。
18.进一步地,所述主动轮的内壁设有第六限位部,当所述伸缩杆收于所述主动轮内时,所述伸缩杆与所述第六限位部抵接。
19.进一步地,所述主动轮的内壁还设有卡止件以及第三弹性件,所述转动件的圆周上设有第七限位部,所述第七限位部圆周均布设置并且数量与所述突出部的数量相同,所述第七限位部包括与所述转动件外壁靠近的第一端以及与所述转动件外壁远离的第二端,所述转动件的第一端自所述第二端圆弧过渡,当所述伸缩杆伸出所述主动轮外时,所述卡止件与所述第七限位部的第二端抵接,所述第三弹性件对所述卡止件提供与所述第六限位部抵接的预紧力。
20.进一步地,所述主动轮包括轮毂以及套设于所述轮毂外部的轮体,所述伸缩杆可伸缩的设于所述轮毂内,所述伸缩杆伸出所述的主动轮外的一端设有柔性件,当所述伸缩杆缩回所述轮毂内时,所述柔性件与所述轮体的表面齐平设置。
21.本实用新型还提供了一种清洁机器人,包括机体、前述的越障轮以及驱动越障轮运动的第二驱动件,所述越障轮的面板固设于所述机体上。
22.本实用新型所达到的有益效果,通过在主动轮上设置可伸缩的伸缩杆,当无需越障时,在第一弹性件的作用能够使伸缩杆收缩在主动轮内,同时使得转动件与主动轮配合连接以转动件能够随主动轮转动而与伸缩杆保持相对静止,避免转动件改变伸缩杆的姿态,从而使主动轮保持在初始状态;当需要机体越障时,通过使转动件与连接柱连接以相对伸缩杆保持静止,伸缩杆随着主动轮转动而能够相对于转动件转动,在转动件的突出部的作用下,伸缩杆能够被突出部顶出主动轮外,之后使转动件与主动轮配合连接以使转动件与伸缩杆保持在相对静止状态,伸缩杆得以保持在当前伸出状态,伸缩杆增大了主动轮的直径,从而增大了主动轮的越障能力。
附图说明
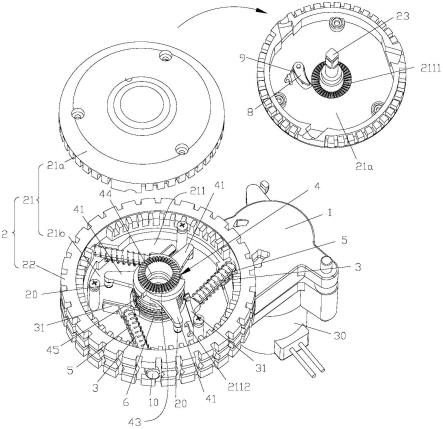
23.图1是本实用新型提供的一种越障轮在初始状态的分解示意图;
24.图2是本实用新型提供的一种越障轮的转动件的结构示意图;
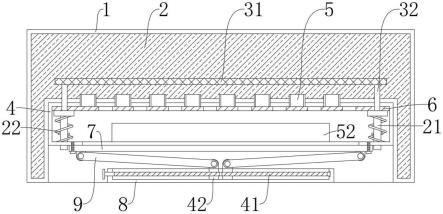
25.图3是本实用新型提供的一种越障轮在初始状态的截面图;
26.图4是图3中a处的放大图;
27.图5是本实用新型提供的一种越障轮在伸缩杆伸出主动轮外的分解示意图;
28.图6是本实用新型提供的一种越障轮在伸缩杆伸出主动轮外的截面图;
29.图7是图6中b处的放大图。
具体实施方式
30.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
31.实施例一
32.参见图1-2,本实用新型实施例提供了一种越障轮,应用于清洁机器人,包括面壳1、主动轮2、伸缩杆3、转动件4以及第一弹性件5。其中,面壳1 的一侧设有连接柱11,面壳1用于与清洁机器人固定,主动轮2套设于连接柱 11外并可相对连接柱11转动,以使主动轮2转动时不会带动面壳1转动,伸缩杆3可伸缩地圆周均布于主动轮2内以使伸缩杆3在不需要伸出时缩在主动轮2内以保证主动轮2以初始姿态行走,第一弹性件5设于主动轮2内并向伸缩杆3提供缩回主动轮2内的预紧力以保证伸缩杆3能收在主动轮2内,转动件4同轴可转动地设于主动轮2内并与主动轮2配合连接,以使主动轮2转动时能够带动转动件4转动,从而保证伸缩杆3与转动件4保持在相对静止的初始状态,转动件4的圆周上设有与伸缩杆3一一对应的突出部41,伸缩杆3位于突出部41转动方向的一侧,转动件4可与主动轮2分离并与连接柱11配合连接以使转动件4脱离主动轮2而与连接柱11连接以保持静止,当转动件4 与连接柱11配合连接时,伸缩杆3的端部与突出部41抵接,即在转动件4保持静止不动的情况下,始终随主动轮2转动的伸缩杆3在相对转动件4转动时,伸缩杆3能够逐渐靠近突出部41并被突出部41顶出,以使伸缩杆3伸出主动轮2外,转动件4在伸缩杆3伸出轮体22外后与连接柱11分离并与主动轮2 配合连接,即使转动件4随主动轮2转动从而与伸缩杆3保持在相对静止的状态,以使伸缩杆3得以保持在伸出状态。
33.通过在主动轮2上设置可伸缩的伸缩杆3,当无需越障时,在第一弹性件5 的作用能够使伸缩杆3收缩在主动轮2内,同时使得转动件4与主动轮2配合连接以转动件4能够随主动轮2转动而与伸缩杆3保持相对静止,避免转动件 4改变伸缩杆3的姿态,从而使主动轮2保持在初始状态;当需要机体越障时,通过使转动件4与连接柱11连接以相对伸缩杆3保持静止,伸缩杆3随着主动轮2转动而能够相对于转动件4转动,在转动件4的突出部41的作用下,伸缩杆3能够被突出部41顶出主动轮2外,之后使转动件4与主动轮2配合连接以使转动件4与伸缩杆3保持在相对静止状态,伸缩杆3得以保持在当前伸出状态,伸缩杆3增大了主动轮2的直径,从而增大了主动轮2的越障能力。
34.本实用新型实施例提供的越障轮,能够根据实际需要增大越障轮的直径而调整越障能力,结构设计巧妙并且稳定可靠。
35.进一步地,伸缩杆3与主动轮2的半径呈夹角设置,即伸缩杆3相对于主动轮2的半径倾斜设置,如此能够增大伸缩杆3的伸缩行程,能够更大程度的增大主动轮2的直径,从而使得越障轮的越障能力更高。
36.在本实施例中,第一弹性件5可以采用但不限于螺旋弹簧。
37.实施例二
38.参见图3-7,在实施例一的基础上,进一步地,转动件4可沿其轴线方向移动,转动件4位于其轴线方向的相对两侧分别设有第一限位部42和第二限位部43,连接柱11上设有可与第一限位部42配合或者分离的第三限位部111,主动轮2的内壁设有可与第二限位部43分离或者配合的第四限位部2111,越障轮还包括第二弹性件6以及第一驱动件7,第二弹性
件6设于主动轮2内并对转动件4提供第二限位部43与第四限位部2111配合的预紧力,第一驱动件 7设于连接柱11上并可驱动转动件4向第三限位部111方向移动以使第一限位部42与第三限位部111配合。
39.如此,在第二弹性件6的作用下,转动件4的第二限位部43与第四限位部 2111配合,以使主动轮2转动时能带动转动件4转动,而当需要伸缩杆3伸出时,第一驱动件7驱动转动件4往远离第二限位部43方向移动以使第一限位部 42与第三限位部111配合,从而能够使得转动件4保持静止状态。
40.进一步地,第一限位部42、第二限位部43、第三限位部111以及第四限位部2111均为绕转动轴23的轴线周向设置的齿。如此能够使得转动件4在转动任一角度后均能保证第一限位部42和第三限位部111配合,第二限位部43和第四限位部2111配合。
41.在本实施例中,第二弹性件6可以采用但不限于螺旋弹簧。
42.实施例三
43.参见图5,在实施例二的基础上,进一步地,第一驱动件7为环状电磁铁,驱动件套设于主动轮2的转动轴23上并且与连接柱11固定以使第一驱动件7 保持静止,避免第一驱动件7随主动轮2转动而导致第一驱动件7的导线缠绕,转动件4朝向第一驱动件7的一侧设有可被磁吸的磁吸部44。第一驱动件7采用电磁铁,能够简化第一驱动件7的结构安装,同时电磁铁小能耗能够达到较大的吸力,成本低,转动件4设置磁吸部44,可以保证电磁铁对转动件4的移动控制。
44.实施例四
45.参见图1-2,在实施例一至实施例三任一实施例的基础上,进一步地,伸缩杆3可与突出部41抵接的一端设有推动杆31,推动杆31可以增大伸缩杆3 与突出部41抵接的面积以使得突出部41与伸缩杆3配合得更加可靠,推动杆 31在其转动方向的末端设有第五限位部311,当伸缩杆3伸出主动轮2外时,突出部41与第五限位部311配合。如此,设置第五限位部311和所述突出部41配合,使得突出部41能够稳固的顶推伸缩杆3,避免突出部41脱离伸缩杆 3以使伸缩杆3伸出主动轮2失效。
46.具体的,第五限位部311为圆弧凹陷部,如此在伸缩杆3随主动轮2转动时以便于突出部41卡入或者脱离第五限位部311。
47.进一步地,突出部41上设有滚轮20,滚轮20与推动杆31抵接并可在推动杆31上滚动。如此可以降低突出部41与伸缩杆3的摩擦,从而避免突出部 41和伸缩杆3之间的磨损以导致精度降低。
48.实施例五
49.参见图1-2,在实施例一至实施例四任一实施例的基础上,进一步地,主动轮的内壁设有第六限位部2112,当伸缩杆3收于主动轮2内时,伸缩杆3与第六限位部2112抵接,即伸缩杆3上的推动杆31与第六限位部2112抵接。如此,在第一弹性件5的作用下,第六限位部2112可以对伸缩杆3在主动轮2 内进行限位。
50.实施例六
51.参见图1-2,在实施例一至实施例五任一实施例的基础上,进一步地,主动轮2的内壁还设有卡止件8以及第三弹性件9,转动件4的圆周上设有第七限位部45,第七限位部45圆周均布设置并且数量与突出部41的数量相同,第七限位部45包括与转动件4外壁靠近的第
一端以及与转动件4外壁远离的第二端,转动件4的第一端自第二端圆弧过渡,以使转动件4正向转动(指的是转动件4随主动轮2转动的方向)时,卡止件8能在第七限位部45的第一端移动至第二端而不会干涉转动件4的正向转动,当伸缩杆3伸出主动轮2外时,卡止件8与第七限位部45的第二端抵接,第三弹性件9对卡止件8提供与第六限位部2112抵接的预紧力。如此,在突出部41顶推伸缩杆3时,卡止件8与第七限位部45的配合可以避免转动件4反向转动从而导致突出部41部脱离伸缩杆3而使得伸缩杆3在第一弹性件5的作用下缩回主动轮2内。
52.在本实施例中,第三弹性件9可以采用单不限于扭簧。
53.实施例七
54.参见图1-2,在实施例一至实施例六任一实施例的基础上,进一步地,主动轮2包括轮毂21以及套设于轮毂21外部的轮体22,伸缩杆3可伸缩地设于轮毂21内,伸缩杆3伸出的主动轮2外的一端设有柔性件10,当伸缩杆3缩回容纳腔211内时,柔性件10与轮体22的表面齐平设置。如此,柔性件10 在伸缩杆3伸出时,能够对伸缩杆3与地面接触的一端进行缓冲,避免伸缩杆 3与地面硬接触而导致磨损,另一方面在伸缩杆3缩回轮毂21内时,柔性件10 能够与轮体22形成一体以保持轮体22外部结构的一致性,还能对伸缩杆3穿设轮体22与轮体22的空隙进行密封以避免杂物进入轮毂21内。
55.在本实施中,柔性件可以采用软胶,例如硅胶、橡胶等其中一种制作。
56.参见图4、6,具体的,轮毂21包括相对设置且盖合形成容纳腔211的第一侧板21a和第二侧板21b,上述的伸缩杆3、第一弹性件5、第一驱动件7、第二弹性件6、转动件4、卡止件8、第三弹性件9均置于容纳腔211内,连接柱11穿设第一侧板21a并伸入容纳腔211内,第一侧板21a可相对连接柱11 转动,第二侧板21b上连接有转动轴23并向连接柱11延伸穿过面壳1,转动轴23由下述的第二驱动件30驱动运转以带动第二侧板21b、第一侧板21a以及轮体22转动,其中,卡止件8和第三弹性件9固定于第二侧板21b,以避免干涉转动件4在其轴线上向第一侧板21a方向移动以与连接柱11配合。
57.实施例八
58.参见图1-2、4、6,本实用新型实施例还提供了一种清洁机器人,包括机体(图中未示出)、前述的越障轮以及驱动越障轮运动的第二驱动件30,越障轮的面壳1固设于所述机体上。具体的,第二驱动件30的驱动端设有传动组 301,传动组301可以为齿轮传动组301,传动组301与上述的转动轴23连接以带动转动轴23转动。
59.本实用新型实施例提供的清洁机器人,能够根据实际需要增大越障轮的直径而调整越障能力,结构设计巧妙并且稳定可靠。
60.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。