基于rao的干扰加噪声背景下距离扩展目标的检测方法
技术领域
1.本发明属于雷达信号处理技术领域,具体涉及一种基于rao的干扰加噪声背景下距离扩展目标的检测方法。
背景技术:
2.高距离分辨率雷达会将空间中的目标分解成多个散射点,在雷达径向上的多个散射点分布在不同的距离单元中,形成距离扩展目标。随着雷达脉冲压缩等宽带技术的广泛应用,有效的解决了雷达的探测距离和探测精度之间的矛盾,确保了高距离分辨率,从而使得距离扩展目标检测成为研究的热点。同时,宽带雷达目标检测不仅面临有意电子干扰措施和无意电磁干扰的复杂外部环境,还需考虑接收机内部热噪声的不利影响。
3.为了提高宽带雷达在干扰和噪声共存的复杂环境下的检测性能,提出基于独立子空间对干扰信号进行回波复信号建模,即将干扰限制在空间坐标未知的已知子空间中。根据干扰信号与目标信号的相关程度,结构化子空间干扰可分为与目标信号不相关的干扰和与目标信号相关的干扰两种情况。无意识的通信信号、旁瓣目标和多径多角度干扰等对目标信号造成的干扰,一般归类为与目标信号不相关的干扰,从公开文献来看,此类干扰背景下的目标检测问题研究关注度较高;此外,照射区域内障碍物后向散射对目标信号造成的干扰情形,一般归类为与目标信号相关的干扰,相比与目标信号无关干扰的背景,此类干扰的目标检测问题亟需受到进一步的关注和研究。
4.与目标信号无关干扰背景下的目标检测,已经取得了很多的研究成果,例如,在无辅助数据的条件下,针对噪声功率已知或未知两种情况,基于广义似然比检验(generalized likelihood ratio test,glrt)准则设计了两种距离扩展目标检测器,并推导了相应的检测概率表达式;在完全未知的干扰环境下,提出了基于glrt和基于wald检验的检测器。
5.存在与目标信号相关干扰的环境下,国内外学者从检验准则、协方差矩阵的结构等角度对子空间信号进行了研究。其中,在rao检验和wald检验准则下,考虑协方差矩阵包含干扰加噪声的情况,针对子空间信号检测取得的了相同的检测效果。补充了glrt检验下的子空间目标检测,同样的,基于三种检验准则下设计的检测器取得了相同的检验效果。在已知干扰的情况下,针对点目标子空间信号推导了一步rao和两步rao检测器。借助奇异值分解重构目标信号和干扰信号,并推导了均匀和部分均匀环境下的一步glrt检测器与两步glrt检测器。由于自适应目标检测不存在一致最大势检验(uniformly most powerful,ump),glrt在理论上不存在最优,因此,基于rao检验等检验准则下的距离扩展目标检测方法有待深入研究。另外,与信号相关干扰相比于与信号无关干扰受到的关注较少。
技术实现要素:
6.为了克服现有技术中的问题,本发明提出了及一种基于rao的干扰加噪声背景下距离扩展目标的检测方法。
7.本发明解决上述技术问题的技术方案如下:
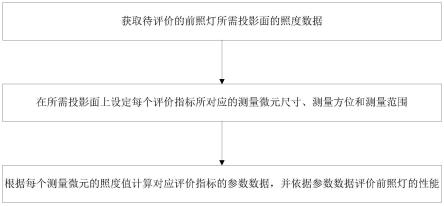
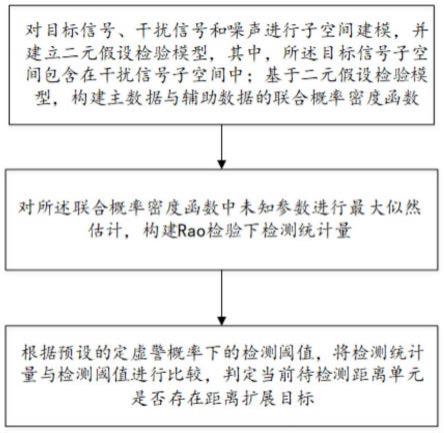
8.一种基于rao的干扰加噪声背景下距离扩展目标的检测方法,包括以下步骤:
9.步骤1.从k个待检测距离单元获取待检测数据作为主数据,从与被检测单元邻近的无目标距离单元获取m个不含目标信号的观测数据作为辅助数据;对目标信号和干扰信号进行子空间建模,噪声建模为噪声功率未知的复高斯分布,并建立二元假设检验模型,其中,所述目标信号子空间包含在干扰信号子空间中;基于二元假设检验模型,构建主数据与辅助数据的联合概率密度函数;
10.步骤2.对所述联合概率密度函数中未知参数进行最大似然估计,构建rao检验下检测统计量λ
srd-rao
;
11.步骤3.根据预设的虚警概率设置检测阈值tg,将检测统计量λ
srd-rao
与检测阈值tg进行比较,若λ
srd-rao
≥tg,则判定当前k个待检测距离单元存在距离扩展目标;反之若λ
srd-rao
《tg,则判定当前k个待检测距离单元不存在距离扩展目标。
12.进一步地,所述步骤1对目标信号和干扰信号进行子空间建模,噪声建模为噪声功率未知的复高斯分布,建立二元假设检验模型,具体包括:
[0013][0014]
其中,h0表示没有目标信号的假设,h1表示有目标信号的假设,待检测主数据表示成x=[x1,x2,...,xk,...,xk],选取邻近距离单元的m个检测数据y=[y1,y2,...,ym,...ym]作为辅助数据;p=[p1,p2,...,pk,...,pk]为主数据中目标信号坐标组成的矩阵,q=[q1,q2,...,qk,...qk]为主数据中干扰信号坐标组成的矩阵,为辅助数据中干扰信号坐标组成的矩阵,n=[n1,n2,...,nk,...,nk]为主数据中噪声矩阵,为辅助数据中噪声矩阵;不同距离单元间观测向量相互统计独立,xk和ym均为n
×
1维复向量,n表示系统处理的通道数;spk为第k个距离单元的目标信号,s已知的n
×
p满秩复矩阵,s的p个列向量张成了信号子空间《s》,pk未知的p
×
1维信号坐标向量;jqk为第k个距离单元的干扰信号,j是n
×
q维列满秩复矩阵,j的q个列向量张成了干扰子空间《j》,qk是未知的q
×
1维干扰坐标向量,假定p q≤n,且qk服从未知的均值为零协方差矩阵为σ的复高斯分布,σ为未知的q
×
q维干扰坐标协方差矩阵,p为目标信号子空间维数,q为干扰子空间维数;噪声分量n在不同距离单元间独立同分布,且服从均值为零协方差矩阵为σ2in的复高斯分布,其中,in表示n维单位矩阵,表示未知的噪声功率;辅助数据y=[y1,y2,...,ym,...ym]中的干扰坐标qm(nm)与主数据中的干扰坐标qk(nk)独立同分布。
[0015]
进一步地,所述步骤1中基于二元假设检验模型,构建主数据与辅助数据的联合概率密度函数:
[0016][0017]
其中,ti=si sm,si=(x-i
·
sp)(x-i
·
sp)h,sm=yyh;i=0,1分别对应假设h0与h1;干噪协方差
[0018]
进一步地,所述步骤2中具体包括以下步骤:
[0019]
步骤2-1:采用平方根分解方法变换干扰矩阵j结构,并对变换后的联合概率密度函数进行对数运算;
[0020]
步骤2-2:对对数形式的联合概率密度函数中干扰坐标协方差矩阵、噪声功率和目标坐标进行最大似然估计;
[0021]
步骤2-3:将目标坐标的最大似然估计量、转换后的干扰坐标协方差估计量与噪声功率的估计量代回联合概率密度函数,构建rao检验下检测统计量λ
srd-rao
。
[0022]
进一步地,步骤2-1中采用平方根分解方法变换干扰矩阵j结构,具体为:
[0023]
jhj=llh[0024]
其中,l是jhj的q
×
q维下三角矩阵。
[0025]
进一步地,所述步骤2-3中构建rao检验下检测统计量λ
srd-rao
[0026]
λ
srd-rao
=(k m)tr[(ik λ1)-1
λ2(ik λ1 λ2)-1
]
[0027]
式中,
[0028]
λ1=xhwx
[0029]
λ2=xhwsx
[0030]ws
=ws(shws)-1
shw
[0031][0032]jl
=j(lh)-1
。
[0033]
与现有技术相比,本发明具有如下技术效果:
[0034]
(1)本发明假设目标信号子空间包含在干扰信号子空间内,以此来表示目标信号与干扰信号的相关性,建立了干扰加未知噪声下基于子空间的距离扩展目标信号模型;
[0035]
(2)基于rao检验策略,在保证恒虚警率特性的同时,采用平方根分解的方法,简化了参数估计过程,提高了检测器构建效率,具有广泛的潜在推广应用价值。
附图说明
[0036]
为了更清楚地说明本发明实施例或现有技术中的技术方案和优点,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
[0037]
图1为本发明的实现流程图;
[0038]
图2为本发明srd-rao检测器的cfar特性示意图;
[0039]
图3为n=12,k=8,m=24,p=2,q=3时,不同干噪比下的检测性能仿真实验示意图;
[0040]
图4为n=12,k=8,m=24,p=2,q=3时,不同干噪比下的检测性能仿真实验示意图;
[0041]
图5为n=12,k=8,m=24,q=4时,目标信号矩阵维数与干扰矩阵维数对检测器检测性能影响示意图;
[0042]
图6为n=12,k=10,p=2,q=3时,辅助数据的数量变化对srd-rao检测器的检测性能影响示意图;
[0043]
图7为n=8,k=8,p=2,inr=10db时,srd-rao检测器与其它检测器的检测性能对比示意图;其中,(a)为q=4,m=24;(b)q=4,m=36;(c)q=6,m=24;
[0044]
图8为n=12,k=8,m=24,q=3,p=2时,信号子空间在不同程度的失配情况下的检测性能曲线示意图;
[0045]
图9、图10为n=12,k=8,m=24,q=3,p=2时,srd-rao检测器干扰子空间失配情况下检测器检测性能的变化情况示意图。
具体实施方式
[0046]
为了更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明提出的技术方案的具体实施方式、结构、特征及其功效,详细说明如下。在下述说明中,不同的“一个实施例”或“另一个实施例”指的不一定是同一个实施例。此外,一个或多个实施例中的特定特征、结构或特点可由任何合适形式组合。
[0047]
除非另有定义,本发明所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。
[0048]
参照图1,本发明提供了一种基于rao的干扰加噪声背景下距离扩展目标的检测方法,包括以下步骤:
[0049]
步骤1.从k个待检测距离单元获取待检测数据作为主数据,从与被检测单元邻近的无目标距离单元获取m个不含目标信号的观测数据作为辅助数据;对目标信号和干扰信号进行子空间建模,噪声建模为噪声功率未知的复高斯分布,建立二元假设检验模型,其中,所述目标信号子空间包含在干扰信号子空间中;基于二元假设检验模型,构建主数据与辅助数据的联合概率密度函数;
[0050]
步骤2.对所述联合概率密度函数中未知参数进行最大似然估计,构建rao检验下检测统计量λ
srd-rao
;
[0051]
步骤3.根据预设的虚警概率设置检测阈值tg;将检测统计量λ与检测阈值tg进行比较,若λ
srd-glrt
≥tg,则判定当前k个待检测距离单元存在距离扩展目标;反之若λ
srd-glrt
《tg,则判定当前k个待检测距离单元不存在距离扩展目标。
[0052]
下面对上述各个步骤进行详细展开:
[0053]
步骤1.从k个待检测距离单元获取待检测数据作为主数据,从与被检测单元邻近的无目标距离单元获取m个不含目标信号的观测数据作为辅助数据;对目标信号和干扰信号进行子空间建模,将噪声建模为噪声功率未知的复高斯分布,建立二元假设检验模型,其中,所述目标信号包含在干扰信号中;基于二元假设检验模型,构建主数据与辅助数据的联合概率密度函数。
[0054]
在一些实施例中,本步骤可以包括以下子步骤:
[0055]
步骤1-1:从k个待检测距离单元获取待检测数据作为主数据,从与被检测单元邻近的无目标距离单元获取m个观测数据作为辅助数据,对目标信号和干扰信号进行子空间建模,将噪声建模为噪声功率未知的复高斯分布,建立二元假设检验模型,其中,所述目标信号包含在干扰信号中;
[0056]
假设接收机采用n个阵元的均匀线性阵列,目标距离扩展范围为k个距离单元,待检测主数据表示成x=[x1,x2,...,xk,...,xk],选取邻近距离单元的m个检测数据y=[y1,
y2,...,ym,...ym]作为辅助数据;p=[p1,p2,...,pk,...,pk]为主数据中目标信号坐标组成的矩阵,q=[q1,q2,...,qk,...qk]为主数据中干扰信号坐标组成的矩阵,为辅助数据中干扰信号坐标组成的矩阵,n=[n1,n2,...,nk,...,nk]为主数据中噪声矩阵,为辅助数据中噪声矩阵;不同距离单元间观测向量相互统计独立,xk和ym均为n
×
1维复向量,n表示系统处理的通道数;spk为第k个距离单元的目标信号,s已知的n
×
p满秩复矩阵,s的p个列向量张成了信号子空间《s》,pk未知的p
×
1维信号坐标向量;jqk为第k个距离单元的干扰信号,j是n
×
q维列满秩复矩阵,j的q个列向量张成了干扰子空间《j》,qk是未知的q
×
1维干扰坐标向量,假定p q≤n,且qk服从未知的均值为零协方差矩阵为σ的复高斯分布,σ为未知的q
×
q维干扰坐标协方差矩阵,p为目标信号子空间维数,q为干扰子空间维数;噪声分量n在不同距离单元间独立同分布,且服从均值为零协方差矩阵为σ2in的复高斯分布,其中,in表示n维单位矩阵,表示未知的噪声功率;辅助数据y=[y1,y2,...,ym,...ym]中的干扰坐标qm(nm)与主数据中的干扰坐标qk(nk)独立同分布。
[0057]
假设目标信号子空间《s》包含在干扰子空间《j》内,记为对应的矩阵维数满足关系p≤q,以此来表示目标信号与干扰信号的相关性。
[0058]
根据上述假设,子空间干扰加未知噪声环境下的距离扩展目标检测问题,可表示为在待检测数据里判断目标是否存在的二元假设检验:
[0059][0060]
其中,h0表示没有目标信号的假设,h1表示有目标信号的假设。
[0061]
步骤1-2:基于二元假设检验模型,构建主数据与辅助数据的联合概率密度函数;
[0062]
假设在k个距离单元中,各距离单元间干扰、噪声相互独立,则在h0和h1两种假设下主数据和辅助数据的联合概率密度函数表示为:
[0063][0064]
其中,ti=si sm,si=(x-i
·
sp)(x-i
·
sp)h,sm=yyh;i=0,1分别对应假设h0与h1;将干扰加噪声的协方差矩阵定义为干噪协方差
[0065]
步骤2.对所述联合概率密度函数中未知参数进行最大似然估计,构建rao检验下检测统计量λ
srd-rao
;
[0066]
由步骤1可知,联合概率密度函数中未知参数包括:噪声功率σ2、目标坐标pk、干扰坐标协方差矩阵σ,因此,对所述联合概率密度函数中噪声功率σ2、目标坐标pk、干扰坐标协方差矩阵σ进行最大似然估计。
[0067]
在一些实施例中,本步骤可以包括以下子步骤:
[0068]
步骤2-1:采用平方根分解方法变换干扰矩阵结构,并对变换后的联合概率密度函数进行对数运算;
[0069]
由于n》q,干扰矩阵j为长方形矩阵,不存在逆矩阵,导致后续求解过程较为繁琐并
且求解出的未知参数估计量形式复杂。为降低求解最大化未知参数的计算量,引入平方根分解方法,将jhj矩阵进行平方根分解表示为llh,其中l是jhj的q
×
q维下三角矩阵,即jhj=llh。平方根分解又称为cholesky分解,通过使用分解后的小矩阵更容易直接求解矩阵的逆,从而简化矩阵计算量,进而降低求解最大化未知参数的计算量。
[0070]
借助平方根分解,定义未知参数矩阵q=σ-2
lhσl,相应的干扰坐标服从的协方差矩阵σ可表示为
[0071][0072]
于是,根据|in an×
qbq
×n|=|iq bq×
nan
×q|,干噪协方差矩阵c的行列式重新表示为
[0073][0074]
其中,|in an×
qbq
×n|=|iq bq×
nan
×q|,上式中j(lh)-1
=a,ql-1
jh=b;j(lh)-1
为n
×
q维矩阵,ql-1
jh为q
×
n维矩阵。
[0075]
干噪协方差矩阵c的逆重新表示为
[0076][0077]
式中,pj=j(jhj)-1
jh表示干扰子空间上的投影矩阵。将干噪协方差矩阵的逆c-1
式(5)带入式(2)可求解tr(c-1
ti)的值为
[0078][0079]
由于本发明考虑的是信号子空间在干扰子空间内部的情况,即存在所以有
[0080][0081]
由式(7)可知,
[0082]
对干扰协方差c进行变换后,进而求解引入新参数后的概率密度函数表达式。结合式(4)、式(5)和式(6),联合概率密度函数式(2)可以重写为
[0083][0084]
步骤2-2:对对数形式的联合概率密度函数中q、噪声功率σ2和目标坐标pk进行最大似然估计;
[0085]
根据式(8)分别求解未知参数q在h0与h1的最大似然估计值与未知噪声功率在h0与h1的最大似然估计值对上式求未知参数的偏导数并令其为零,可得
[0086][0087]
由于求解出的与含有未知参数,所以进一步求解关于与的二元一次方程,可得具体的与表达式
[0088][0089]
由可知,式(9)中后续用表示h0和h1假设下的噪声功率。将求解出的和代回式(7)可得到
[0090][0091]
令j
l
=j(lh)-1
,|l-1
jht1j(lh)-1
|可做进一步处理
[0092][0093]
式中对式(11)做取对数运算,然后将式(12)代回式(11)可得
[0094][0095]
根据上式对目标坐标p求偏导数可得
[0096][0097]
令偏导数为0,可得目标坐标p的最大似然估计量为
[0098]
[0099]
步骤2-3:根据目标坐标的最大似然估计量转换后的干扰坐标协方差估计量与噪声功率的估计量构建基于rao检验准则下的srd-rao检测器的检测统计量λ
srd-rao
;
[0100]
在rao检验下,检验统计量可表示为
[0101][0102]
式中,λ
srd-rao
为检验统计量,tr为rao检验下的检测阈值;表示总的未知参数构建的列向量,θr=vec(p)表示信号的未知坐标参数构成的列向量;包含未知干扰坐标和未知噪声功率构成的列向量;是kp q2 1维的列向量,表示总的未知参数θ在h0假设下的最大似然估计值;f(θ)表示未知参数θ的fisher信息矩阵;表示时f-1
(θ)矩阵中(θr,θr)位置对应的子矩阵,f(θ)表示为
[0103][0104]
利用分块矩阵逆的转换关系,(θr,θr)位置对应的逆矩阵可表示为
[0105][0106]
在时,所以上式可以简化为
[0107][0108]
为求解检验统计量λ
srd-rao
的具体表达式,需计算目标坐标θr、θ
*
在lnf1下的偏导数,于是有
[0109][0110][0111][0112]
利用式(21)、式(22),计算的值为
[0113][0114]
于是,的值为
[0115][0116]
检验统计量式(16)中的复杂形式可以做进一步简化。将式(20)、式(21)和式(24)代入检验统计量λ
srd-rao
表达式式(16),可以得到
[0117][0118]
λ
srd-rao|c
表示未知参数为c时λ
srd-rao
表达式。接下来求解时,干噪协方差c的具体表达式。利用式(10)求得的代入协方差矩阵逆c-1
的表达式式(5),可以得到
[0119][0120]
最后,将式(26)代入式(25),可得到具体的λ
srd-rao
检验统计量
[0121][0122]
式(27)即为基于rao检验下得到的检验统计量。
[0123]
进一步对检验统计量式(27)做简化处理,其中,可拆分为
[0124][0125]
利用式(28),可重写为
[0126][0127]
利用式(28),可重写为
[0128][0129]
式中ws=ws(shws)-1
shw。
[0130]
利用式(28),可重写为
[0131][0132]
将化简后的式(29)、式(30)和式(31)代入式(27)可得
[0133]
λ
srd-rao
=(k m)tr[(ik λ1)-1
λ2(ik λ1 λ2)-1
]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(32)
[0134]
式中,λ1=xhwx、λ2=xhwsx、ws=ws(shws)-1
shw。
[0135]
步骤3.根据预设的虚警概率设置检测阈值tg,将检测统计量λ
srd-rao
与检测阈值tg进行比较,若λ
srd-rao
≥tg,则判定当前k个待检测距离单元存在距离扩展目标;反之若λ
srd-rao
《tg,则判定当前k个待检测距离单元不存在距离扩展目标。
[0136]
证明rao检测器对干扰信号和噪声的联合协方差矩阵c的cfar特性,具体为:
[0137]
为方便分析,定义
[0138][0139]
可得到xj与yj的分布为
[0140][0141]
式中,r=jhcj。令检测统计量中的λ1,λ2可以重写为
[0142][0143][0144]
证明srd-rao检测器对r具有cfar特性,在h0假设下对r具有cfar特性,需要验证和与变换后的干噪协方差r无关。
[0145]
(1)验证在h0假设下与r无关
[0146]
利用白化变换的性质,可以写为
[0147][0148]
式中,x
rj
=r-1/2
xj,y
rj
=r-1/2
yj;表示对的白化变换。进一步,可以得到x
rj
的协方差矩阵
[0149][0150]
由上式可知,在h0假设下x
rj
中的每一列是服从零均值、协方差矩阵为iq的复圆高斯向量。同时,意味着g0的分布是自由度为m,协方差矩阵为iq的n维复中心威沙特分布。所以,可以得出在h0假设下与r无关。
[0151]
(2)验证在h0假设下与r无关
[0152]
首先是对进行白化变换可以得到
[0153][0154]
式中,进一步对上式进行酉变换,可得
[0155][0156]
式中,uuh=in,u表示酉矩阵;x
urj
=uhx
rj
、g=uhg0u分别表示x
rj
、g0酉变换后的矩阵;即表示p
ur
与变换后的协方差矩阵r无关。经过酉变换后,矩阵
x
urj
与矩阵x
rj
、矩阵g与矩阵g0统计上等价,所以x
urj
和g在h0假设下与协方差矩阵r无关,即在h0假设下与r无关。
[0157]
综合分析,由和与变化后的协方差矩阵r无关可知,所提检测器srd-rao对干扰加噪声协方差矩阵c具有cfar特性。
[0158]
本发明假设目标信号子空间《s》包含在干扰子空间《j》内,记为对应的矩阵维数满足关系p《q,以此来表示目标信号与干扰信号的相关性,建立了干扰加未知噪声下基于子空间的距离扩展目标信号模型。基于rao检验策略,推导了基于rao检验的干扰加噪声背景下距离扩展目标的检测器,在保证恒虚警率特性的同时,采用平方根分解的方法,简化了参数估计过程,提高了检测器构建效率,具有广泛的潜在推广应用价值。
[0159]
本发明的效果可通过以下仿真实验说明:
[0160]
通过蒙特卡洛仿真对srd-rao的craf特性和检测性能进行分析。设虚警概率(probabilities of false alarm,pfa)为10-3
,获取阈值的仿真次数设为100/pfa,获取检测概率(probabilities of detection,pd)的仿真次数设为5000。信号与干扰加噪声的比值(signal to interference plus noise ratio,sinr)为
[0161]
sinr=tr(phshc-1
sp)/k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(41)
[0162]
干扰与噪声的比值(interference-to-noise ratio,inr)为
[0163][0164]
不失一般性,每次独立的蒙特卡洛仿真下,令干扰矩阵j的第d列向量为
[0165][0166]
式中,j指的是虚数单位d=1,2,...,q。
[0167]
由于本发明设信号子空间在干扰子空间内部,所以信号子空间通过干扰子空间乘以随机的q
×
p维列满秩矩阵获得,记为s=jt。设干扰坐标协方差矩阵σ采用托普利兹矩阵结构,第a行第b列的元素为γ
a-b
,其中,γ为一阶迟滞系数,表示干扰坐标协方差矩阵的相关性。
[0168]
验证srd-rao检测器对噪声功率以及干扰坐标协方差矩阵σ的cfar特性,其结果见图2。图2表明,固定一阶迟滞系数γ,仅噪声功率水平变化,同一阈值下的虚警概率基本不变;固定噪声功率水平仅一阶迟滞系数γ变化,同一阈值下的虚警概率也是非常接近,由此可得出srd-rao检测器的检测性能基本不受干扰坐标协方差矩阵相关性与噪声功率的影响,从而验证了本文所提检测器对噪声功率水平和干扰坐标协方差矩阵σ具有恒虚警率特性,这与前面的理论分析一致。
[0169]
为测试检测器的抗干扰性,设置了不同干噪比下的检测性能仿真实验,其中,设一阶迟滞系数γ为0.9,噪声功率为1。结果见图3、图4。从图3、图4可以看出,不同的inr下,srd-rao检测器的检测性能几乎是相同的,这说明上述检测器具有良好的抗干扰性能。
[0170]
下面分析目标信号矩阵维数p与干扰矩阵维数q对检测器检测性能的影响,结果如图5所示。从图5可以看出,信号子空间维数p增大,相同sinr下检测概率降低;固定信号子空
间维数,仅干扰子空间维数q增大,检测概率下降。导致这一现象的原因可能是,由于目标信号子空间在干扰子空间内部,信号子空间维数p增大意味着占据干扰子空间的比重提高,换句话说,会有更多的投射到干扰子空间的目标能量被移除,从而导致检测器的检测性能下降。
[0171]
进一步研究辅助数据的数量对srd-rao检测器的检测性能影响,结果如图6所示。由图6可以看出,srd-rao检测器的检测性能随辅助数据的增加而改善,这是因为辅助数据增加,相应估计的协方差矩阵精度提高,从而间接提高检测概率。其中,srd-rao检测器在辅助数据数量m≤16时,检测概率pd不再是sinr的单调递增函数,可以解释为,rao检验最初是针对低信噪比和大辅助数据量的情况提出的,在没有足量的辅助数据支撑下,检测效果会明显下降。
[0172]
上述对检测器研究是基于子空间匹配的前提下,由于目标检测的过程中不可避免的会出现信号子空间失配或干扰子空间失配的情况,以信号失配为例,信号失配可以理解为实际子空间导向矢量与名义上的导向矢量出现偏差,导致检测性能遭受不同程度的损失。因此本发明研究了所提检测器的信号子空间与干扰子空间在失配条件下检测器的检测性能。
[0173]
接下来对信号子空间失配与干扰子空间失配情况进行分析。利用cos2θ来表示名义上的信号子空间s与实际干扰子空间s0的失配程度,表达式为
[0174][0175]
利用cos2φ来表示名义上的干扰子空间j与实际干扰子空间j0的失配程度,表达式为
[0176][0177]
其中,cos2θ=1表示名义上的信号子空间s与实际信号子空间s0完全匹配的情况,cos2θ=0表示名义上的信号子空间s与实际信号子空间s0完全失配的情况。信号子空间失配情况下,具体的检测性能损失情况见图8。
[0178]
图8显示了信号子空间在不同程度失配情况下的检测性能曲线。由图8可以看出,srd-rao检测器完全匹配与完全失配的最大误差约为2db,由此可知本发明的检测器在信号子空间失配情况下,仍能表现出稳健的性能。
[0179]
干扰子空间失配情况下,具体的检测性能损失情况见图9、图10。图9与图10描述的是srd-rao干扰子空间失配情况下检测器检测性能的变化情况。从图9可以看出,在检测概率等于0.9时,检测器完全失配情况相比于匹配时的检测性能大约损失1.5db。从图10可以看出,干扰子空间从失配到完全匹配的过程中检测性能变化不大,从而得出对干扰进行子空间建模可以有效地缓解失配情况下带来的性能损失。
[0180]
以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含
在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。