1.本发明涉及汽车工程技术领域,具体涉及汽车前照灯的性能评价。
背景技术:
2.汽车前照灯对夜间道路照明具有重要作用,包括近光灯和远光灯,用于向驾驶员提供夜间及雾、雨、雪等天气条件下的道路照明,帮助驾驶员发现前方道路障碍物或行人,以便采取规避或制动措施。近年来,公众对汽车前照灯性能的要求日益提高,其照明效果的好坏也直接决定了行车安全。其中,良好的近光灯应保证一定的照射距离和照明宽度,并避免造成对向炫目;良好的远光灯应保证足够的照射距离,并保证一定的照明宽度和高度。
3.现有技术提出了一种基于台架测试的汽车近光灯照度分布试验台架及其试验方法,该方案提供了一种基于台架测试的前照灯性能评估方法。通过读取设备实物测试照度分布图,评估固定测点位置的照度值,进而评估前照灯性能。该专利的缺陷在于:1、仅能对实物测试数据进行处理;2、仅能进行手动单点测量,不能自动对测量范围内的所有测点进行计算;3、仅能通过固定点照度值近似评估前照灯的照明范围,不能精准到具体位置;4、仅能对单一路面高度测点进行测试,对不同路面高度的测点需要进行多次测量转换。
技术实现要素:
4.本发明的目的之一在于提供一种前照灯性能评价方法,以解决背景技术的问题至少之一;目的之二在于提供一种前照灯性能评价系统。
5.为了实现上述目的,本发明采用的技术方案如下:
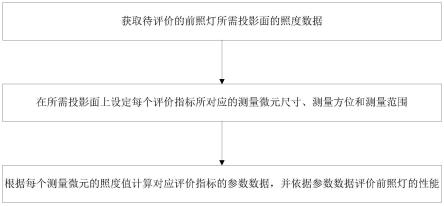
6.一种车辆前照灯性能评价方法,所述评价方法具体为:
7.获取待评价的前照灯所需投影面的照度数据;
8.在所需投影面上设定每个评价指标所对应的测量微元尺寸、测量方位和测量范围;
9.根据每个测量微元的照度值计算对应评价指标的参数数据,并依据参数数据评价前照灯的性能。
10.根据上述技术手段,通过获取每个评价指标的投影面照度数据,再根据设定每个评价指标所对应的测量微元尺寸、测量方位和测量范围,从而获得评价指标的参数数据,无需在读取实物测试数据,并且无需手动单点测量,自动对测量范围内的所有测点进行计算。
11.进一步,所述评价指标包括近光灯指标和远光灯指标,所述近光灯指标包括直道引导距离、弯道引导距离、左侧行人可见度、路口行人探测宽度、弯道照明宽度、光通量、对向驾驶员炫目至少之一;所述远光灯指标包括照明范围、路口行人探测宽度、光通量至少之一。
12.进一步,确定所述直道引导距离、弯道引导距离、左侧行人可见度、照明范围的方法为:
13.在对应的评价指标的所需投影面上划分p1个测量方位,
14.针对某一个测量方位的maxu到minu范围内,逐个计算所有测量微元内的照度值,进而计算标准照度值slux1在相邻两个测量微元间的精确位置,然后返回该测量方位上灯光照射达到所述标准照度值的距离值;
15.获得所有测量方位的所述距离值的均值d,通过所述均值d评价所述直道引导距离、弯道引导距离、左侧行人可见度、照明范围;
16.maxu到minu分别表示所述所需投影面的测量范围的最大值和最小值。
17.进一步,获取所述计算标准照度值slux1在相邻两个测量微元间的精确位置的方法在于:当lux(j)>slux1且lux(j)≠lux(j-1)时,
18.restdistj=(cellsize1
×
(lux(j)-slux1))/(lux(j)-lux(j-1));
19.lux(j1)=lux(j
1-1)时,
20.restdistj=0.5
×
cellsize1;
21.若lux(j-1)为空,则lux(j-1)=lux(j)。
22.lux(j)<slux1时,distancej=0;
23.lux(j)表示第j个测量微元的照度;
24.cellsize1为获取所述直道引导距离、弯道引导距离、左侧行人可见度或者照明范围时的测量微元尺寸;
25.slux1为获取获取所述直道引导距离、弯道引导距离、左侧行人可见度或者照明范围时的标准照度值;
26.restdistj表示获取所述直道引导距离、弯道引导距离、左侧行人可见度或者照明范围时的所述某一测量方位的标准照度值slux1在相邻两个测量微元间的精确位置。
27.根据上述技术手段,可根据实际情况,将测量方位分为任意数量的测量微元,进而通过插值的数学方法获取restdistj,有效的提高了计算的精度。
28.进一步,获得所有测量方位的所述距离值的均值d的方法为:
[0029][0030]
其中,当lux(j)>slux1时,所述直道引导距离、左侧行人可见度或者照明范围的所述灯光照射达到所述标准照度值slux1的距离值获取方法为:
[0031]
distancej=maxu-cellsize1
×
j restdistj,
[0032]
所述弯道引导距离的获取方法为:
[0033]
distancej=maxu-cellsize1
×
j restdistj s
×
tanα;
[0034]
其中,distancej表示获取所述直道引导距离、左侧行人可见度、弯道引导距离或者照明范围的所述某一个测量方位灯光照射达到所述标准照度值slux1的距离值;
[0035]
s表示对向车道的道路中心线起始位置的偏移量;
[0036]
α表示所计算的测量方位与行车方向的夹角;
[0037]
n1表示所述某一个测量方位的测量微元的个数。
[0038]
进一步,获取评价所述路口行人探测宽度、近光灯指标的路口行人探测宽度或者远光灯指标的路口行人探测宽度的参数数据的方法为:
[0039]
在对应的评价指标的所需投影面的垂直方向上划分p2个测量方位;
[0040]
针对某一个测量方位的minv到maxv范围内,逐个计算所有测量微元内的照度值;
[0041]
分别计算在maxv到0范围内以及在minv到0范围内的标准照度值slux2在相邻两个测量微元间的精确位置,然后分别返回该测量方位上maxv到0范围内以及在minv到0范围内的灯光照射达到所述标准照度值slux2的距离值;
[0042]
获得所有测量方位的所述距离值的均值e;
[0043]
获取评价所述照明范围的参数数据时,令对应的测量方位与u方向成空间β角度;
[0044]
minv到maxv分别表示在垂直于所述所需投影面的测量范围的最小值和最大值;
[0045]
u方向为汽车行进方向;
[0046]
β表示u方向所成的立体角度。
[0047]
进一步,获取所述标准照度值slux2在相邻两个测量微元间的精确位置的方法为:
[0048]
当lux(k)>slux2且lux(k)≠lux(k-1)时,
[0049]
restdistk=(cellsize2
×
(lux(k)-slux2))/(lux(k)-lux(k-1));
[0050]
lux(k)=lux(k-1)时,
[0051]
restdistk=0.5
×
cellsize2;
[0052]
若lux(k-1)为空,则lux(k-1)=lux(k);
[0053]
lux(k)表示在该测量方位上,在该测量方位的maxv到0范围内或者minv到0范围内的第k个测量微元的照度;
[0054]
k表示在该测量方位上,在该测量方位的maxv到0范围内或者minv到0范围内的某一个测量微元;
[0055]
cellsize2为在该测量方位的maxv到0范围内或者minv到0范围内的测量微元尺寸;
[0056]
slux2为获取所述路口行人探测宽度、近光灯指标的路口行人探测宽度或者远光灯指标的路口行人探测宽度的参数数据的标准照度值。
[0057]
进一步,获得所有测量方位的所述距离值的均值e的方法为
[0058][0059]
distancek=|distance(max1)| |distance(min1)|
[0060]
当lux(k)>slux2时;
[0061]
distance(max1)或者distance(min1)=maxw-cellsize2
×
n2 restdistk;
[0062]
当lux(k)<slux2时,distance(max1)或者distance(mmin1)=0;
[0063]
其中,distancek表示某一测量方位上,在道路中心线的第一侧的灯光照射达到slux2照度的距离值;
[0064]
n2表示在该测量方位的maxv到0范围内或者minv到0范围内的测量微元数量;maxw表示在所述所需投影面上的测量范围的最大值。
[0065]
进一步,获取评价所述近光灯指标的光通量、对向驾驶员炫目或者远光灯指标的光通量的参数数据的方法为:
[0066]
在对应的所述所需投影面上,依次在maxy到miny和maxz到minz围成的范围内,逐个计算所有测量微元的照度值;
[0067]
针对评价所述对向驾驶员炫目,则获取所述所有测量微元内的照度值后,与所属划分区域的权重值相乘后累加;
[0068]
针对评价所述近光灯指标的光通量或者远光灯指标的光通量,则获取所述所有测量微元内的照度值后累加;
[0069]
其中:maxy到miny分别代表评价所述近光灯指标的光通量、对向驾驶员炫目或者远光灯指标的光通量的所需投影面的水平方向上的测量范围的最大值和最小值;
[0070]
maxz到minz分别代表评价所述近光灯指标的光通量、对向驾驶员炫目或者远光灯指标的光通量的所需投影面的垂直方向上的测量范围的最大值和最小值。
[0071]
进一步,所述所需投影面照读数据是根据车辆左右侧近光灯或远光灯间距w、离地高度h、倾斜角度a参数通过投影法和距离平方反比定律将光学数据转换得到。
[0072]
一种基于上述的评价方法的车辆前照灯性能评价系统,
[0073]
包括:照度数据获取模块,配置为获取待评价的前照灯所需投影面的照度数据;
[0074]
设定模块,配置为在所需投影面上设定每个评价指标所对应的测量微元尺寸、测量方位和测量范围;
[0075]
参数数据获取模块,配置为根据每个测量微元的照度值计算对应评价指标的参数数据;
[0076]
评价模块,配置为依据参数数据评价前照灯的性能。
[0077]
一种计算机可读介质,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行上述的方法。
[0078]
本发明的有益效果:
[0079]
本发明能够对软件仿真数据、台架实测数据进行处理,自动对测量范围内的所有测点进行计算,精准计算所要求的特定照度照明范围,可以同时对不同路面高度的测点进行处理,进而节约测试的工作量并提高测试效率;
[0080]
本发明可以根据前照灯安装参数、仿真或实测光学数据,自动对各评价项数据进行精准计算,且各评价项的测试指标均可以灵活调整,在计算对应的参数数据时,可将测量方位分为多个测量微元,测量微元的长度和个数可根据个人需求调整,并通过插值的数学计算方式获取最终的参数数据,在节约测试工作量的前提下也保证了计算的精度。
附图说明
[0081]
图1为本发明流程图;
[0082]
图2为光学数据转换为投影面照度图;
[0083]
图3为近光直道引导距离算法示意图;
[0084]
图4为近光弯道引导距离算法示意图;
[0085]
图5为近光左侧行人可见度算法示意图;
[0086]
图6为近光路口行人探测宽度算法示意图;
[0087]
图7为近光弯道照明宽度算法示意图;
[0088]
图8为近光光通量算法示意图;
[0089]
图9为近光对向驾驶员炫目算法示意图;
[0090]
图10为远光照明范围算法示意图;
[0091]
图11为远光路口行人探测宽度算法示意图;
[0092]
图12为远光光通量算法示意图;
[0093]
图13为前照灯性能评价系统示意图。
[0094]
其中,1-照度数据获取模块;2-设定模块;3-参数数据获取模块;4-评价模块。
具体实施方式
[0095]
以下将参照附图和优选实施例来说明本发明技术方案的实施方式,本领域技术人员可由本说明书中所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。应当理解,优选实施例仅为了说明本发明,而不是为了限制本发明的保护范围。
[0096]
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
[0097]
实施例1
[0098]
如图1所示,本实施例提出了一种前照灯性能评价方法,具体为:
[0099]
步骤一:获取待评价的前照灯所需投影面的照度数据。
[0100]
具体的,根据车辆左右侧近光灯或远光灯间距w、离地高度h、倾斜角度a参数,将软件仿真数据或台架测试数据调入到正确位置,并根据各评价项算法需要直接进行计算,或通过投影法和距离平方反比定律将光学数据转换为所需投影面照度数据。
[0101]
进一步地,根据左右侧近光灯间距w1、远光灯间距w2、近光离地高度h1、远光离地高度h2、近光垂直倾斜角度a1、远光垂直倾斜角度a2参数确定灯具安装位置和垂直倾斜角度,如表1所示。
[0102]
表1灯具安装位置表
[0103]
功能x坐标y坐标z坐标垂直倾斜角度近光(左)0w1/2h1a1近光(右)0-w1/2h1a1远光(左)0w2/2h2a2远光(右)0-w2/2h2a2
[0104]
进一步地,如图2所示,根据灯具安装位置和下倾角信息,将软件仿真数据或台架测试数据调入到正确位置,正确位置表示灯具的安装位置,或通过投影法和距离平方反比定律将光学数据转换为所需投影面照度数据。根据评价的需要,所需的投影面照度数据可以为一个,或者多个。
[0105]
步骤二:如表2所示,在所需投影面上设定每个评价指标所对应的测量微元尺寸、测量方位和测量范围。
[0106]
测量微元是指进行照度值测量的最小单元,算法将对最小单元的照度值进行积分求解,其形态可以是投影面上的矩形、圆形等形状,也可以是与投影面成空间角度的矩形、圆形等形状,或是被投影面切割的、位于投影面被灯光照射一侧的圆柱面、圆球面等的一部分。
[0107]
测量微元尺寸是指测量微元在投影面法线方向上的投影尺寸,其投影形状可以是
矩形、圆形等。为了保证算法精度,测量微元尺寸应远小于投影面尺寸。
[0108]
表2本实施例中的参数设置项目表
[0109]
[0110]
[0111]
[0112][0113]
步骤三:根据每个测量微元的照度值计算对应评价指标的参数数据,并依据参数数据评价前照灯的性能。
[0114]
本实施例中,需要评价的指标包括近光灯指标和远光灯指标,近光灯指标包括直道引导距离、弯道引导距离、左侧行人可见度、路口行人探测宽度、弯道照明宽度、光通量、对向驾驶员炫目;远光灯指标包括照明范围、路口行人探测宽度、光通量。
[0115]
上述指标的参数数据计算方法具体如下:
[0116]
1、近光灯
[0117]
直道引导距离
[0118]
设定参数如表2。如图3所示,依次沿着恒定v坐标的p条直线,在maxu到minu范围内,逐个计算第1到n个测量微元内的照度值,当第n个微元的照度值lux(n)大于测量标准照度值slux时,进行表3逻辑判断,通过插值计算求得测量标准照度值slux在相邻两个测量微元间的精确位置restdist,并返回distance值。共返回p个测量方位、符合m个测量标准照度值的p*m个distance值。
[0119]
表3计算评价直道引导距离的参数数据的逻辑表
[0120][0121]
用数学表达式表达具体如下:
[0122]
在所需投影面照度上划分为p11个测量方位,每个测量方位划分n
11
个测量微元,然后通过如下方式获得d1:
[0123][0124]
当lux(j1)>slux11时,distancej1=maxu1-cellsize11
×
j1 restdistj1,
[0125]
其中lux(j1)≠lux(j
1-1)时,
[0126]
restdistj1=(cellsize11
×
(lux(j1)-slux11))/(lux(j1)-lux(j
1-1));
[0127]
lux(j1)=lux(j
1-1)时,
[0128]
restdistj1=0.5
×
cellsize11;
[0129]
若lux(j
1-1)为空,则lux(j
1-1)=lux(j1);
[0130]
当lux(j1)<slux11时,distancej1=0;
[0131]
其中,distancej1表示某一测量方位上的某个测量微元的lux(j1)表示第j1个测量微元的照度;
[0132]
cellsize11为获取所述直道引导距离时设定的测量微元尺寸;
[0133]
slux11为获取所述直道引导距离时设定的标准照度值;
[0134]
restdistj1表示第j1个微元中心距离slux11照度点的距离;
[0135]
d1表示p11个测量方位获得的灯光照射达到slux11照度的距离均值。
[0136]
弯道引导距离
[0137]
设定参数如表2。如图4所示,依次沿着与u方向成α度,与原点间隔s距离的p条斜线,在maxu到minu范围内,逐个计算第1到n个测量微元内的照度值,当第n个微元的照度值lux(n)大于测量标准照度值slux时,进行表4逻辑判断,通过插值计算求得测量标准照度值slux在相邻两个测量微元间的精确位置restdist,并返回distance值。共返回p个测量方位、符合m个测量标准照度值的p*m个distance值。u方向表示汽车的行进方向,车在弯道上行进方向切线不是u方向。
[0138]
表4评价弯道引导距离的参数数据逻辑表
[0139][0140][0141]
具体可用如下的数学表达式计算:
[0142]
在所需投影面照度上划分为p
12
个测量方位,每个测量方位划分n
12
个测量微元,然后通过如下方式获得d2:
[0143][0144]
当lux(j2)>slux12时,distancej2=maxu2-cellsize11
×n12
restdistj2 s
×
tanα
[0145]
其中lux(j2)≠lux(j
2-1)时,
[0146]
restdistj2=(cellsize12
×
(lux(j2)-slux12))/(lux(j2)-lux(j
2-1));
[0147]
lux(j2)=lux(j
2-1)时,
[0148]
restdistj2=0.5
×
cellsize12;
[0149]
若lux(j
2-1)为空,则lux(j
2-1)=lux(j2);
[0150]
当lux(j2)<slux12时,distancej2=0;
[0151]
其中,distancej2表示某一测量方位上的灯光照射达到所述标准照度值slux12的距离值;
[0152]
lux(j2)表示第j2个测量微元的照度;
[0153]
cellsize12为获取评价弯道引导距离的参数数据时设定的测量微元尺寸;
[0154]
slux12为获取评价弯道引导距离的参数数据时设定的标准照度值;
[0155]
maxu2表示获取评价弯道引导距离的参数数据时设定的测量范围的最大值;
[0156]
α表示所计算的测量方位与行车方向的夹角;
[0157]
restdistj2表示第j2个微元中心距离slux12照度点的距离;
[0158]
d2表示p2个测量方位获得的灯光照射达到slux12照度的距离均值;
[0159]
表示对向车道的道路中心线起始位置的偏移量。
[0160]
左侧行人可见度
[0161]
设定参数如表2。如图5所示,依次沿着恒定v坐标的p条直线,在maxu到minu范围内,逐个计算第1到n个测量微元内的照度值,当第n个微元的照度值lux(n)大于测量标准照度值slux时,进行表5逻辑判断,通过插值计算求得测量标准照度值slux在相邻两个测量微元间的精确位置restdist,并返回distance值。共返回p个测量方位、符合m个测量标准照度值的p*m个distance值。
[0162]
表5评价左侧行人可见度的参数数据逻辑表
[0163][0164]
或者用如下的数学表达式计算:
[0165]
获取评价所述左侧行人可见度的参数数据的方法为:在所需投影面照度上划分为p
13
个测量方位,每个测量方位划分n
13
个测量微元,然后通过如下方式获得d3:
[0166][0167]
当lux(j3)>slux13时,distancej3=maxu3-cellsize3
×
j3 restdistj3[0168]
其中lux(j3)≠lux(j
3-1)时,
[0169]
restdistj3=(cellsize13
×
(lux(j3)-slux13))/(lux(j3)-lux(j
3-1));
[0170]
lux(j3)=lux(j
3-1)时,
[0171]
restdistj3=0.5
×
cellsize13;
[0172]
若lux(j
3-1)为空,则lux(j
3-1)=lux(j3);
[0173]
当lux(j3)<slux13时,distancej3=0;
[0174]
其中,distancej3表示某一测量方位上的灯光照射达到所述标准照度值slux13的距离值lux(j3)表示第j3个测量微元的照度;
[0175]
cellsize13为获取评价左侧行人可见度的参数数据时设定的测量微元尺寸;
[0176]
slux13为获取评价左侧行人可见度的参数数据时设定的标准照度值;
[0177]
maxu3表示获取评价左侧行人可见度的参数数据时设定的测量范围的最大值;
[0178]
restdistj3表示第j3个微元中心距离slux13照度点的距离;
[0179]
d3表示p13个测量方位获得的灯光照射达到slux13照度的距离均值,通过d3来评
价左侧行人可见度。
[0180]
弯道照明宽度
[0181]
设定参数如表2。如图6所示,依次沿着恒定u坐标的p条直线,在maxv到0范围内,逐个计算第1到n个测量微元内的照度值,当第n个微元的照度值lux(n)大于测量标准照度值slux时,进行表6逻辑判断,通过插值计算求得测量标准照度值slux在相邻两个测量微元间的精确位置restdist,并返回distance(max)值。
[0182]
按照上述算法,在minv到0范围内,再次计算得到distance(min)值。将distance(max)和distance(min)的绝对值相加,得到distance值。共返回p个测量方位、符合m个测量标准照度值的p*m个distance值。distance(max1)与distance(min1)是分别计算的,因为对于软件来说,道路左侧到0(道路中心线)是正值部分(即distance(max1)所在区域),道路右侧到0是负值部分(即distance(min1)所在区域),正值和负值部分需要分别划分微元进行计算,再取绝对值相加才是整个宽度
[0183]
表6评价弯道照明宽度的参数数据逻辑表
[0184][0185][0186]
获取评价弯道照明宽度的参数数据的方法为:在垂直于获取弯道照明宽度的所需投影面上划分为p
21
个测量方位,每一个测量方位划分为n
21
个测量单元,以道路中心线为分界线,道路中心线第一侧划分为n
211
个测量微元,道路中心线第二侧划分为n
212
个测量微元,其中n
21
=n
211
n
212
,然后通过如下方式获得e1:
[0187][0188]
distancek1=|distance(max1)| |distance(min1)|
[0189]
当lux(k1)>slux21时,distance(max1)=maxw1-cellsize211
×
k11 restdistk11;
[0190]
其中lux(k11)≠lux(k11-1)时,
[0191]
restdistk11=(cellsize211
×
(lux(k11)-slux21))/(lux(k11)-lux(k11-1));
[0192]
lux(k11)=lux(k11-1)时,
[0193]
restdistk11=0.5
×
cellsize211;
[0194]
若lux(k11-1)为空,则lux(k11-1)=lux(k11);
[0195]
当lux(k11)<slux21时,distancek11=0;
[0196]
k11表示在该测量方位上,在道路中心线的第一侧的某一个测量微元,1≤k11≤n
51
;
[0197]
k12表示在该测量方位上,在道路中心线的第二侧的某一个测量微元,1≤k12≤n
52
;
[0198]
当lux(k12)>slux21时,distance(min1)=minw1-cellsize212
×
k12 restdistk12;
[0199]
其中lux(k12)≠lux(k12-1)时,
[0200]
restdistk12=(cellsize212
×
(lux(k12)-slux21))/(lux(k12)-lux(k12-1));
[0201]
lux(k12)=lux(k12-1)时,
[0202]
restdistk12=0.5
×
cellsize52;
[0203]
若lux(k12-1)为空,则lux(k12-1)=lux(k12);
[0204]
当lux(k12)<slux21时,distancek12=0;
[0205]
其中,distancek11表示某一测量方位上,在道路中心线的第一侧的灯光照射达到slux5照度的距离值;
[0206]
distancek12表示该测量方位上,在道路中心线的第二侧的灯光照射达到slux5照度的距离值;
[0207]
lux(k11)表示在该测量方位上,在道路中心线的第一侧的第j
51
个测量微元的照度;
[0208]
lux(k12)表示在该测量方位上,在道路中心线的第二侧的第j
52
个测量微元的照度;
[0209]
cellsize211为获取评价所述路口行人探测宽度的参数数据时,在该测量方位的道路中心线的第一侧设定的测量微元尺寸;
[0210]
cellsize212为获取评价所述路口行人探测宽度的参数数据时,在该测量方位的道路中心线的第二侧设定的测量微元尺寸;
[0211]
slux21为获取评价所述弯道照明宽度的参数数据时设定的标准照度值;
[0212]
maxw1表示获取评价所述弯道照明宽度的参数数据时设定的测量范围的最大值.
[0213]
路口行人探测宽度
[0214]
设定参数如表2。如图7所示,依次沿着恒定u坐标的p条直线,在maxv到0范围内,逐个计算第1到n个测量微元内的照度值,当第n个微元的照度值lux(n)大于测量标准照度值slux时,进行表7逻辑判断,通过插值计算求得测量标准照度值slux在相邻两个测量微元间的精确位置restdist,并返回distance(max)值。
[0215]
按照上述算法,在minv到0范围内,再次计算得到distance(min)值。将distance(max)和distance(min)的绝对值相加,得到distance值。共返回p个测量方位、符合m个测量标准照度值的p*m个distance值。
[0216]
表7评价路口行人探测宽度的参数数据逻辑表
[0217][0218]
用数学表达式为:
[0219]
在获取所需路口行人探测宽度投影面照度上划分为p
22
个测量方位,每个测量方位划分n
22
个测量微元,以道路中心线为分界线,道路中心线第一侧划分为n
221
个测量微元,道路中心线第二侧划分为n
222
个测量微元,其中n
22
=n
221
n
222
,然后通过如下方式获得e2:
[0220][0221]
distancek2=|distance(max2)| |distance(min2)|
[0222]
当lux(k21)>slux22时,distance(max1)=maxw2-cellsize221
×
k21 restdistk21;
[0223]
其中lux(k21)≠lux(k21-1)时,
[0224]
restdistk21=(cellsize221
×
(lux(k21)-slux21))/(lux(k21)-lux(k21-1));
[0225]
lux(k21)=lux(k21-1)时,
[0226]
restdistk21=0.5
×
cellsize221;
[0227]
若lux(k21-1)为空,则lux(k21-1)=lux(k21);
[0228]
当lux(k21)<slux22时,distancek21=0;
[0229]
distance(min2)=maxw2-cellsize222
×
k22 restdistk22;
[0230]
当lux(k22)>slux22时,distance(min2)=maxw2-cellsize222
×
k22 restdistk22;
[0231]
其中lux(k22)≠lux(k22-1)时,
[0232]
restdistk22=(cellsize222
×
(lux(k22)-slux22))/(lux(k22)-lux(k22-1));
[0233]
lux(k22)=lux(k22-1)时,
[0234]
restdistk22=0.5
×
cellsize222;
[0235]
若lux(k22-1)为空,则lux(k22-1)=lux(k22);
[0236]
当lux(k22)<slux22时,distancej
42
=0;
[0237]
其中,distancek21表示某一测量方位上,在道路中心线的第一侧的灯光照射达到slux4照度的距离值;
[0238]
distancek22表示该测量方位上,在道路中心线的第二侧的灯光照射达到slux4照度的距离值;
[0239]
lux(k21)表示在该测量方位上,在道路中心线的第一侧的第j
41
个测量微元的照度;
[0240]
lux(k22)表示在该测量方位上,在道路中心线的第二侧的第j
42
个测量微元的照度;
[0241]
k21表示在该测量方位上,在道路中心线的第一侧的某一个测量微元,1≤j
41
≤n
41
;
[0242]
k22表示在该测量方位上,在道路中心线的第二侧的某一个测量微元,1≤j
42
≤n
42
;
[0243]
cellsize221为获取评价所述路口行人探测宽度的参数数据时,在该测量方位的道路中心线的第一侧设定的测量微元尺寸;
[0244]
cellsize222为获取评价所述路口行人探测宽度的参数数据时,在该测量方位的道路中心线的第二侧设定的测量微元尺寸;
[0245]
slux22为获取评价所述路口行人探测宽度的参数数据时设定的标准照度值;
[0246]
maxw2表示获取评价所述路口行人探测宽度的参数数据时设定的测量范围的最大值.
[0247]
光通量
[0248]
设定参数如表2。如图8所示,依次在maxu到minu和maxv到minv围成的范围内,逐个计算第1到n个测量微元内的照度值,并进行累加得到value值。
[0249]
对向驾驶员炫目
[0250]
设定参数如表2。如图9所示,依次在maxu到minu和maxv到minv围成的范围内,逐个计算第1到n个测量微元内的照度值,并与所属划分区域的权重值相乘后进行累加得到value值。
[0251]
2、远光灯指标
[0252]
照明范围
[0253]
设定参数如表2。如图10所示,前述获取所需投影面照度的方法,投影面位置可以自定义的,但是是预先定义的此处因为远光灯照明范围是一个约束角度(多个角度)的类似圆锥面,没有办法直接确定投影面(也即光学数据没有换算到最终投影面上),所以需要先在各计算位置找到交点,然后换算出在原始光学数据上的位置进行计算。具体的,获取照明范围的所需的投影面照度的方法如下:
[0254]
依次沿着与u方向成空间β角度的p条直线,在maxu到minu范围内,逐个计算第1到n个测量微元所在位置上垂直于u方向的投影面与该直线交点lpos。并根据投影面位置lpos和左右灯具安装位置的连线,确定连线与步骤一所述光学数据所在位置的交点(u,v)。计算该点发光强度值,并根据距离平方反比定律计算其在投影面上的照度。
[0255]
当第n个微元的照度值lux(n)大于测量标准照度值slux时,进行表8逻辑判断,通过插值计算求得测量标准照度值slux在相邻两个测量微元间的精确位置restdist,并返回distance值。共返回p个测量方位、符合m个测量标准照度值的p*m个distance值。
[0256]
表8评价照明范围的参数数据逻辑表
[0257][0258]
也可用数学表达式的方式进行计算,具体的:
[0259]
在所需投影面照度上划分为p14个测量方位,所有所述测量方位与u方向成空间β角度,每个测量方位划分个测量微元,然后通过如下方式获得d4:
[0260][0261]
当lux(j4)>slux14时,distancej4=maxu4-cellsize14
×n14
restdistj4,
[0262]
其中lux(j4)≠lux(j
4-1)时,
[0263]
restdistj4=(cellsize14
×
(lux(j4)-slux14))/(lux(j4)-lux(j
4-1));
[0264]
lux(j4)=lux(j
4-1)时,
[0265]
restdistj4=0.5
×
cellsize14;
[0266]
若lux(j
4-1)为空,则lux(j
4-1)=lux(j4);
[0267]
当lux(j4)<slux14时,distancej4=0;
[0268]
其中,distancej4表示某一测量方位灯光照射达到所述标准照度值slux14的距离值
[0269]
lux(j4)表示第j4个测量微元的照度;
[0270]
cellsize14为获取所述直道引导距离时设定的测量微元尺寸;
[0271]
slux14为获取所述直道引导距离时设定的标准照度值;
[0272]
restdistj4表示第j4个微元中心距离slux14照度点的距离;
[0273]
d4表示p14个测量方位获得的灯光照射达到slux14照度的距离均值,通过d4来评价所述照明范围;
[0274]
u方向为车辆前进方向,即灯光照射方向;
[0275]
β角为与u方向所成的立体角度,无数个β角度的线合并在一起是一个以u方向为轴的圆锥面或圆锥面的一部分。
[0276]
路口行人探测宽度
[0277]
设定参数如表2。如图11所示,依次沿着恒定u坐标的p条直线,在maxv到0范围内,逐个计算第1到n个测量微元内的照度值,当第n个微元的照度值lux(n)大于测量标准照度值slux时,进行表9逻辑判断,通过插值计算求得测量标准照度值slux在相邻两个测量微元间的精确位置restdist,并返回distance(max)值。
[0278]
按照上述算法,在minv到0范围内,再次计算得到distance(min)值。将distance(max)和distance(min)的绝对值相加,得到distance值。共返回p个测量方位、符合m个测量标准照度值的p*m个distance值。
[0279]
表9评价路口行人探测宽度的参数数据逻辑表
[0280][0281]
获取评价路口行人探测宽度的参数数据的方法为:在所需投影面照度上划分为p
23
个测量方位,每一个测量方位划分为n
23
个测量单元,以道路中心线为分界线,道路中心线第一侧划分为n
231
个测量微元,道路中心线第二侧划分为n
232
个测量微元,其中n
23
=n
231
n
232
,然后通过如下方式获得e3:
[0282][0283]
distancek3=|distance(max3)| |distance(min3)|
[0284]
当lux(k31)>slux23时,
[0285]
distance(max3)=maxw3-cellsize231
×
k31 restdistk23;
[0286]
其中lux(k31)≠lux(k31-1)时,
[0287]
restdistk31=(cellsize231
×
(lux(k31)-slux23))/(lux(k31)-lux(k31-1));
[0288]
lux(k31)=lux(k31-1)时,
[0289]
restdistk31=0.5
×
cellsize231;
[0290]
若lux(k31-1)为空,则lux(k31-1)=lux(k31);
[0291]
当lux(k31)<slux23时,distancek31=0;
[0292]
当lux(k32)>slux23时,
[0293]
distance(min3)=maxw3-cellsize232
×
k32 restdistk32;
[0294]
其中lux(k32)≠lux(k32-1)时,
[0295]
restdistk32=(cellsize232
×
(lux(k32)-slux23))/(lux(k32)-lux(k32-1));
[0296]
lux(k32)=lux(k32-1)时,
[0297]
restdistk32=0.5
×
cellsize232;
[0298]
若lux(k32-1)为空,则lux(k32-1)=lux(k32);
[0299]
当lux(k32)<slux23时,distancek32=0;
[0300]
其中,distancek31表示某一测量方位上,在道路中心线的第一侧的灯光照射达到slux7照度的距离值;
[0301]
distancek32表示该测量方位上,在道路中心线的第二侧的灯光照射达到slux7照度的距离值;
[0302]
lux(k31)表示在该测量方位上,在道路中心线的第一侧的第j
71
个测量微元的照度;
[0303]
lux(k32)表示在该测量方位上,在道路中心线的第二侧的第j
72
个测量微元的照
度;
[0304]
k31表示在该测量方位上,在道路中心线的第一侧的某一个测量微元,1≤j
71
≤n
71
;
[0305]
k32表示在该测量方位上,在道路中心线的第二侧的某一个测量微元,1≤j
72
≤n
72
;
[0306]
cellsize231为获取评价所述路口行人探测宽度的参数数据时,在该测量方位的道路中心线的第一侧设定的测量微元尺寸;
[0307]
cellsize232为获取评价所述路口行人探测宽度的参数数据时,在该测量方位的道路中心线的第二侧设定的测量微元尺寸;
[0308]
slux23为获取评价所述弯道照明宽度的参数数据时设定的标准照度值;
[0309]
maxw3表示获取评价所述路口行人探测宽度的参数数据时设定的测量范围的最大值;光通量
[0310]
设定参数如表2。如图12所示,依次在maxu到minu和maxv到minv围成的范围内,逐个计算第1到n个测量微元内的照度值,并进行累加得到value值。
[0311]
步骤四:按表10所示,对测量返回结果进行计算处理,得到该评价项最终结果。
[0312]
表10计算结果返回表
[0313][0314][0315]
采用在一个假想车型上计算前照灯性能作为具体实施例。
[0316]
根据车辆左右侧近光灯或远光灯间距w、离地高度h、倾斜角度a参数,将软件仿真数据或台架测试数据调入到正确位置,并根据各评价项算法需要直接进行计算,或通过投影法和距离平方反比定律将光学数据转换为所需投影面照度数据。
[0317]
根据左右侧近光灯间距1.3m、远光灯间距1.3m、近光离地高度0.85m、远光离地高度0.85m、近光垂直倾斜角度-1
°
、远光垂直倾斜角度-1
°
参数确定灯具安装位置和垂直倾斜角度,如表11所示。将光学数据调入到正确位置,并根据各评价项算法需要直接进行计算,或通过投影法和距离平方反比定律将光学数据转换为所需投影面照度数据。
[0318]
表11
[0319]
功能x坐标y坐标z坐标垂直倾斜角度
近光(左)00.65m0.85m-1
°
近光(右)0-0.65m0.85m-1
°
远光(左)00.65m0.85m-1
°
远光(右)0-0.65m0.85m-1
°
[0320]
各评价项算法参数设定如表12所示。
[0321]
表12
[0322]
[0323]
[0324]
[0325][0326]
表13
[0327]
0.20.20.20.20.20.20.20.20.20.20.50.50.50.50.50.20.20.20.51110.50.20.20.20.51110.50.20.20.20.50.50.50.50.50.2
[0328]
按照上述的算法对测量范围内的测量微元逐个计算数据值,并执行逻辑判断,根据算法返回相应结果。
[0329]
对测量返回结果进行计算处理,得到该评价项最终结果,如表14所示。
[0330]
表14
[0331][0332]
实施例2
[0333]
本实施例提出了一种前照灯性能评价系统,如图13所示,包括照度数据获取模块1,配置为获取待评价的前照灯所需投影面的照度数据;
[0334]
设定模块2,配置为在所需投影面上设定每个评价指标所对应的测量微元尺寸、测量方位和测量范围;
[0335]
参数数据获取模块3,配置为根据每个测量微元的照度值计算对应评价指标的参数数据;
[0336]
评价模块4,配置为依据参数数据评价前照灯的性能。
[0337]
每个部分的计算方式如实施例1所述,此处不再赘述。
[0338]
以上实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。