1.本发明属于消防救援设备技术领域,具体涉及一种空地协同远程危险化学品在线侦检系统及侦检方法。
背景技术:
2.目前,无人机和地面移动机器人都已经在危化品侦检行动中得到了应用,例如专利cn 113791039 a(专利申请号)和专利cn 217006516 u,此类设备的运用,避免了人员进入危化品污染区域所带来的风险。
3.然而,无人机虽然具备行动灵活的特点,但是无法进行递近侦检,面对没有发生大规模气体扩散的危化品事故场合显得无能为力。
4.地面移动机器人可以进行抵近侦检,但是由于视野有限,且缺乏现场环境全局地图,如果危化品泄漏场合在操作人员视线之外,一旦行驶路线选择不当,将导致机器人无法及时抵达目标场合,影响了侦检工作的效率。同时,当前的机器人在进行侦检时,主要负责将危化品进行取样后返回后方进行检测,后方人员同样面临危化品的威胁。
技术实现要素:
5.本发明的目的在于提供一种快速、高效、灵活的空地协同远程危险化学品在线侦检系统。
6.本发明利用无人机为地面移动机器人提供导航控制,使其可以快速进入指定区域开展工作;地面移动机器人除了采样之外,可以在线对危化品进行检测并将相关数据传至后方供检测人员判断。
7.本发明所提供的空地协同远程危险化学品在线侦检系统,其针对确定危化品泄漏区域,系统包括地面移动机器人、无人机和远程控制端;所述地面移动机器人,采用履带或者多轮作为移动机构,通过电机驱动转动;所述地面移动机器人,其主体顶端设有用于拍摄地面移动机器人周围现场环境的360
°
摄像头,其前端设有用于拍摄地面移动机器人前端地面的前景摄像头;所述地面移动机器人,其主体上还设有一机械臂,机械臂端部设有用于探测地面移动机器人周围现场中样品中有害物质成分的拉曼光谱探测器;所述机械臂具有多个可转动关节,用于灵活控制拉曼光谱探测器的位置;所述地面移动机器人,围绕其主体设置若干毫米波雷达,该毫米波雷达用于进一步探查地面移动机器人周围复杂地形;所述地面移动机器人,其主体内设有集成控制装置,同360
°
摄像头、前景摄像头、机械臂、拉曼光谱探测器、毫米波雷达以及移动机构连接;使得集成控制装置能够:收集360
°
摄像头、前景摄像头的图像数据,读取拉曼光谱探测器检测环境样品得到的有毒物质成分数据,接收毫米波雷达对地面移动机器人周围的探测数据,控制机械臂的各个关节轴的转动,控制移动机构的电机转动;
所述集成控制装置中设有无线收发装置,该无线收发装置能与远程控制端无线连接,收发数据信号(包括传输图像数据,接收控制信号);所述集成控制装置还集成有gps定位装置;所述无人机,设置有用于拍摄地面移动机器人周围整个地形的摄像头;无人机的控制装置上设有无线收发装置,该无线收发装置能与远程控制端无线连接,能收发数据信号(包括传输图像数据,接收控制信号);无人机中还集成有gps定位装置;所述远程控制端,通过人工控制,向地面移动机器人和无人机发出控制信号;其带有显示屏,能显示地面移动机器人和无人机发来的图像数据。
8.根据上述系统,本发明还提供基于空地协同远程危险化学品在线侦检方法,具体步骤如下:步骤(1):所述无人机对在高空飞行,飞行覆盖范围涵盖危化品泄漏地点和地面移动机器人出发地点,无人机在飞行途中对该区域进行划分拍照,拍摄获得若干个局部照片,并在线对其进行降噪预处理,并通过无线收发装置发回远程控制端;步骤(2):将所有图像信息通过无线收发装置发送到远程控制端,远程控制端设置于安全区域,利用gps信息、地面标识物位置信息以及各张图片的特征匹配拼接形成该区域的完整图片,该图片不光反应整个区域的影像信息,还包含其中任何一点的经纬度信息,该图片通过远程控制端的屏幕显示出来,供远程控制端的操作人员进行分析判断;所述判断包括具有疑似危害物质,需要地面移动机器人探查;或者依据地面移动机器人各条预设路线途中障碍物状况改道避让等;步骤(3):操作人员根据判断,规划新的位置连线,作为地面移动机器人新的移动路线,远程控制端将新的移动路线离散为一个经纬坐标信息的序列,发送至地面移动机器人;步骤(4):地面移动机器人根据收到的新的经纬坐标信息,根据其自身的集成的gps定位装置,对应经纬坐标信息进行移动;同时,地面移动机器人通过360
°
摄像头和前景摄像头将其拍摄到的周围实时环境视频图像通过无线收发装置发送给远程控制端,通过屏幕显示出来;同时依靠其自身周围设置的毫米波雷达对周围地形进行高精度探测,实时避让一些细小的地形障碍,该细小的地形障碍为无人机高空无法拍摄清楚的障碍;步骤(5):地面移动机器人到达指定地点,接收远程控制端发来的控制信号,操作人员远程通过控制机械臂使拉曼光谱探测器去靠近危化品泄漏区域中的环境样品,进行有毒成分的探测,拉曼光谱探测器探测得到的数据,通过无线收发装置远程传送反馈给远程控制端,在显示屏上显示出来。
9.本发明中,所述危化品泄漏区域能依据地面移动机器人的移动范围相应扩大调整。
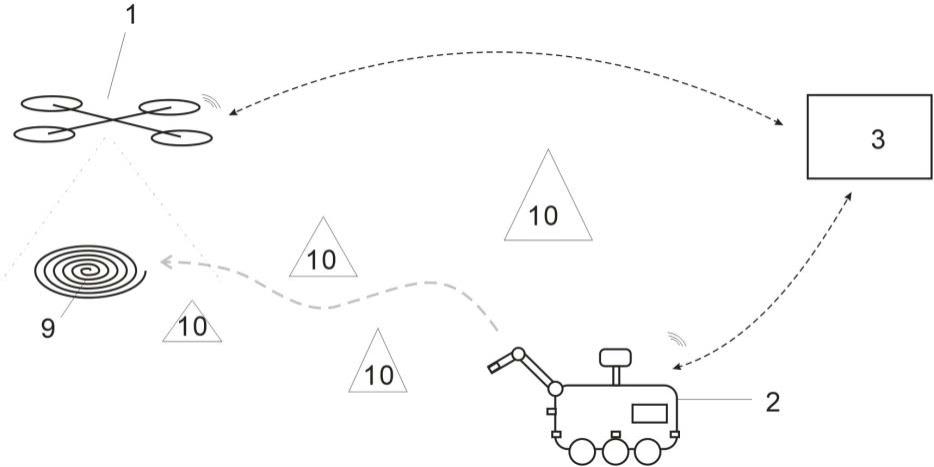
10.本发明工作原理如图1所示,无人机在高空飞行,从空中确定危化品泄漏区域的大体位置,同时,将飞行途中所获的各个局部图像进行拼接,图像的拼接基于图像之间特征的重叠、无人机定位信息、地面标识物的信息,形成一张覆盖整个区域的全局实景地图,此地图包含了每一点的gps坐标,操作人员通过这张地图,了解了从地面移动机器人起始位置到危化品泄漏区域的整个区域的情况,并根据地面移动机器人尺寸和障碍物等情况,为地面移动机器人规划路线,并在地图上进行手工标识。标识完成后,地面移动机器人以划定的路
线为参照,结合自身搭载的毫米波雷达对周边地形的探测结果,对路线进行适当修正,无碰撞地行进至发生泄漏的区域。
11.本发明充分发挥无人机行动灵活,可在高处进行大范围观察的特点,为地面移动机器人提供导航控制,引导其行驶到危化品泄漏区域,进行在线侦检活动,实施快速、灵活、高效的对危化品泄漏区域的侦检。
附图说明
12.图1为本发明的系统整体结构示意简图。
13.图2为本发明的地面移动机器人的结构示意简图。
14.图中标号:1为无人机,2为地面移动机器人,3为远程控制端,4为360
°
摄像头,5为前景摄像头,6为机械臂,7为拉曼光谱探测器,8为毫米波雷达,9为危化品泄漏地点,10为障碍物。
具体实施方式
15.本发明所提供的空地协同远程危险化学品在线侦检系统,其针对确定危化品泄漏区域,系统包括无人机1、地面移动机器人2和远程控制端3;所述地面移动机器人2,采用六轮作为移动机构,每个轮通过电机形成全驱驱动;地面移动机器人2主体顶端设有用于拍摄地面移动机器人周围现场环境的360
°
摄像头4,其前端设有用于拍摄地面移动机器人前端地面的前景摄像头5;其主体上还设有一机械臂6,机械臂6端部设有用于探测地面移动机器人周围现场中样品中有害物质成分的拉曼光谱探测器7;所述机械臂8具有多个可转动关节,用于灵活控制拉曼光谱探测器7的位置;围绕地面移动机器人2主体前、后、左、右均设置一毫米波雷达8,该毫米波雷达8用于进一步探查地面移动机器人2周围复杂地形;所述地面移动机器人2,其内设有集成控制装置,同360
°
摄像头4、前景摄像头5、机械臂6、拉曼光谱探测器7、毫米波雷达8以及移动机构连接;使得集成控制装置能够:收集360
°
摄像头4、前景摄像头5的图像数据,读取拉曼光谱探测器7检测环境样品得到的有毒物质成分数据,接收毫米波雷达8对移动机器人周围的探测数据,控制机械臂6的各个关节轴的转动,控制移动机构的电机转动;所述集成控制装置中设有无线收发装置,可以采用高速数传电台进行无线收发信号的,该高速数传电台能与远程控制端无线连接,收发数据信号(包括传输图像数据,接收控制信号);所述集成控制装置还集成有gps定位装置。
16.所述无人机1,设置有用于拍摄地面移动机器人2周围整个地形的摄像头;无人机的控制装置上设有能无线收发信号的高速数传电台作为无线收发装置,该高速数传电台能与远程控制端无线连接,能收发数据信号(包括传输图像数据,接收控制信号);无人机中还集成有gps定位装置;所述远程控制端3,通过人工控制,向地面移动机器人和无人机发出控制信号;其带有显示屏,能显示移动机器人和无人机发来的图像数据。
17.根据上述系统,其工作方法具体步骤如下:
步骤(1):无人机采用大疆经纬m300无人机在高空飞行,其定位精度,所搭载的吊舱分辨率为1920*1080;所述无人机对在高空飞行,飞行覆盖范围涵盖危化品泄漏地点9和机器人出发地点,从空中确定危化品泄漏地点周边区域的大体位置,无人机在飞行途中对该区域进行划分拍照,拍摄获得若干个局部照片,并首先对所获图像进行预处理,降低噪声、去除图像中的畸变,提高图像特征的可检测性,并通过高速数传电台发回远程控制端;步骤(2):将所有图像信息通过高速数传电台发送到远程控制端,远程控制端设置于安全区域,利用gps信息、地面标识物位置信息以及各张图片的特征匹配拼接形成该区域的完整图片;具体可以是:通过sift算法提取图像特征进行匹配,再采用ransac算法建立最优的匹配模型,完成图像之间的配准;将不同图像进行拼接,消除在重叠区域因为光线强度、特征点的错误匹配或者视差所形成的伪影,使拼接后的图像更加自然;同时,地面上放置的标识物具有与良好的可辨识度,同时具备较高的定位精度(),形成一张覆盖整个区域的全局实景地图;该图片不光反应整个区域的影像信息,还包含其中任何一点的经纬度信息,该图片通过远程控制端的屏幕显示出来,供远程控制端的操作人员进行分析判断;该判断包括具有疑似危害物质,需要地面移动机器人探查;或者依据地面移动机器人各条预设路线途中障碍物10状况改道避让等;步骤(3):操作人员可以取得此张地图上的任何一点的精确二维坐标,通过这张地图,了解了从地面移动机器人起始位置到危化品泄漏区域的整个区域的情况;并且操作人员根据图片中判断出若干障碍物10,再根据地面移动机器人尺寸和障碍物10等情况判断,为地面移动机器人规划新的位置连线,作为地面移动机器人新的移动路线,远程控制端将新的移动路线离散为一个经纬坐标信息的序列,发送至地面移动机器人;步骤(4):地面移动机器人根据收到的新的经纬坐标信息,以划定的路线为参照,结合其自身的集成的gps定位装置,对应经纬坐标信息进行移动;同时,地面移动机器人通过360
°
摄像头和前景摄像头将其拍摄到的周围实时环境视频图像通过高速数传电台发送给远程控制端,通过屏幕显示出来;同时依靠其自身周围设置的毫米波雷达对周围地形进行高精度探测,实时避让一些细小的地形障碍,该细小的地形障碍为无人机高空无法拍摄清楚的障碍;步骤(5):地面移动机器人到达指定地点,接收远程控制端发来的控制信号,操作人员远程通过控制机械臂使拉曼光谱探测器去靠近危化品泄漏区域中的环境样品,进行有毒成分的探测,拉曼光谱探测器探测得到的数据,通过数传电台远程传送反馈给远程控制端,在显示屏上显示出来。
18.本发明充分发挥无人机行动灵活,可在高处进行大范围观察的特点,为地面移动机器人提供导航控制,引导其行驶到危化品泄漏区域,进行在线侦检活动,实施快速、灵活、高效的对危化品泄漏区域的侦检。
19.尽管为使解释简单化,将上述方法图示并描述为一系列结构,但是应理解并领会,这些方法不受具体所限,因为根据一个或多个实施例,一些结构可按不同次序发生和/或与
来自本文中图示和描述或本文中未图示和描述但本领域技术人员可以理解的其他动作并发地发生。
20.对本公开的各种修改对本领域技术人员来说都将是显而易见的,且本文中所定义的普适原理可被应用到其他变体而不会脱离本公开的精神或范围。由此,本公开并非旨在被限定于本文中所描述的示例和设计,而是应被授予与本文中所公开的原理和新颖性特征相一致的最广范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。