一种hsv3s空间模型的构建方法
技术领域
1.本发明属于模式识别领域,具体的说是一种hsv3s空间模型的构建方法,使其能够更加高效地实现图像rgb空间与hsv3s空间的转换。
背景技术:
2.日常可见到的彩色图像大都以rgb颜色空间进行编码。rgb颜色空间以红r(red)、绿g(green)、蓝b(blue)三种基本色为基础,进行不同程度的叠加,产生丰富而广泛的颜色,所以俗称三基色模式。但在科学研究一般不采用rgb颜色空间,因为它将色调,亮度,饱和度三个量放在一起表示,很难分开,所以,rgb颜色空间适合于显示系统,却并不适合于图像处理。
3.hsv(hue,saturation,value)颜色空间模型用h、s、v描述颜色特性,其中h定义颜色的频率,称为色调;s表示颜色的深浅程度,称为饱和度;v表示光照强度或明度。它比rgb更接近人们对彩色的感知经验,非常直观地表达颜色的色调、鲜艳程度和明暗程度,方便进行颜色的对比。因此在图像处理中使用较多的是hsv空间。
4.一直以来,弱光照图像增强是模式识别领域的一个重要课题,科研人员提出并发展了许多有显著意义和应用价值的方法。按其技术特点可以分为两类:基于数据驱动的方法和基于模型驱动的方法。基于数据驱动的方法使用大规模图像训练深度神经网络,使得深度神经网络能够产生弱光照图像的正常光照图像,基于数据驱动的方法要求高质量的大量训练图像,在实际应用中往往难以获得,因此,不能高效地的实现图像rgb空间与图像hsv3s空间的转换。基于模型驱动的方法,将图像rgb空间转换到hsv空间,针对光照通道v增强,然后将处理后的hsv空间图像转换到rgb空间,具有较好增强效果。hsv3s空间模型,具有较快的速度,较小的饱和度。
技术实现要素:
5.本发明的目的是提供一种hsv3s空间模型的构建方法,使其能够更加高效地的实现图像rgb空间与图像hsv3s空间的转换。
6.本发明采用的具体技术方案如下:
7.一种hsv3s空间模型的构建方法,具体包括以下步骤:
8.步骤一:通过图像采集,获得图像rgb空间。r(red)表示图像rgb空间的红色通道、g(green)表示图像rgb空间的绿色通道、b(blue)表示图像rgb空间的蓝色通道。{r、g、b}表示图像rgb空间的任意一个彩色点,其中r表示该彩色点的红色分量值,g表示该彩色点的绿色分量值,b表示该彩色点的蓝色分量值。图像rgb空间的r通道由该图像所有彩色点的r分量值构成,图像rgb空间的g通道由该图像所有彩色点的g分量值构成,图像rgb空间的b通道由该图像所有彩色点的b分量值构成。
9.步骤二:求取图像rgb空间转换到hsv3s(hsv with 3sectors)空间的模型。h(hue)表示图像hsv3s空间的色调通道、s(saturation)表示图像hsv3s空间的饱和度通道、v
(value)表示图像hsv3s空间的明度通道。{h、s、v}表示图像hsv3s空间任意一个彩色点,其中h表示该彩色点的色调分量值,s表示该彩色点的饱和度分量值,v表示该彩色点的明度分量值。图像hsv3s空间的h通道由该图像所有彩色点的h分量值构成,图像hsv3s空间的s通道由该图像所有彩色点的s分量值构成,图像hsv3s空间的v通道由该图像所有彩色点的v分量值构成。
10.具体流程如下:
11.流程2.1:图像hsv3s空间中彩色点的明度分量值v定义如下:
12.v=max(r,g,b)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
13.其中r、g、b分别是步骤1中图像rgb空间中彩色点的红色分量值、绿色分量值、蓝色分量值。max(r,g,b)表示取{r、g、b}中的最大值。
14.流程2.2:图像hsv3s空间中彩色点的饱和度分量值s定义如下:
[0015][0016]
其中v是流程2.1中得到的图像hsv3s空间中彩色点的明度分量值。
[0017]
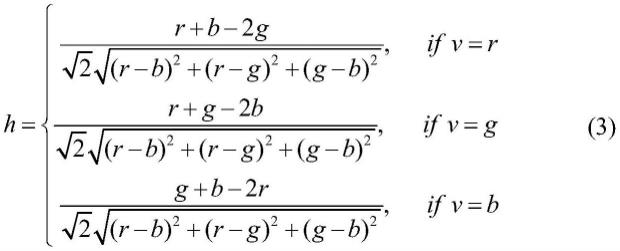
流程2.3:根据流程2.1中明度分量值v的取值与r、g、b分量值的关系,可以构建三个区间,分别是v=r,v=g,v=b。图像hsv3s空间中彩色点色调分量值h在这三个区间分别求取,色调分量值h定义如下:
[0018][0019]
式(1)、式(2)和式(3)是图像rgb空间任意一个彩色点{r、g、b}转化为图像hsv3s空间对应的彩色点{h、s、v}的模型。当图像rgb空间所有彩色点转换为图像hsv3s空间对应的彩色点后,即可获得图图像hsv3s空间的h,s,v三通道。
[0020]
步骤三:求取步骤二中得到的图像hsv3s空间转换为rgb空间的模型。通过求解步骤二中式(1),式(2)和式(3),可以得到图像hsv3s空间转换为rgb空间的模型如下:
[0021][0022][0023][0024]
式(4)、式(5)和式(6)将图像hsv3s空间任意一个彩色点{h、s、v}转化为图像rgb空
间对应的彩色点{r、g、b}。当图像hsv3s空间所有彩色点转换为图像rgb空间对应的彩色点后,即可获得图像rgb空间的r、g、b三通道。
[0025]
本发明的有益效果:本发明将图像rgb空间到转换到hsv空间,与传统方法相比,本方法更加简洁,转换速度更快,在hsv3s空间中图像的饱和度更小,对提升高饱和度弱光照图像增强的性能具有重要价值;本发明针对弱光照图像增强中的图像颜色和光照的分离,将传统的六区间hsv空间模型,改进为三区间的hsv3s空间模型,在简化算法的同时,获得的饱和度更小;本方法可显著提升高饱和度弱光照图像增强的图像颜色和光照的分离速度,获得增强效果更好的图像;本发明从实际应用效果出发,其算法简洁,计算高效。
附图说明
[0026]
图1为本发明方法整体流程图。
[0027]
图2为图像rgb空间与图像hsv3s空间的几何关系图。
[0028]
图3为图像hsv3s空间的投影面几何示意图。
具体实施方式
[0029]
为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
[0030]
实施例:一种hsv3s空间模型的构建方法,其流程图如图1所示,具体按照以下步骤进行:
[0031]
步骤一:通过图像采集,获得图像rgb空间。r(red)表示图像rgb空间的红色通道、g(green)表示图像rgb空间的绿色通道、b(blue)表示图像rgb空间的蓝色通道。{r、g、b}表示图像rgb空间的任意一个彩色点,其中r表示该彩色点的红色分量值,g表示该彩色点的绿色分量值,b表示该彩色点的蓝色分量值。图像rgb空间的r通道由该图像所有彩色点的r分量值构成,图像rgb空间的g通道由该图像所有彩色点的g分量值构成,图像rgb空间的b通道由该图像所有彩色点的b分量值构成。
[0032]
步骤二:求取图像rgb空间转换到hsv3s(hsv with 3sectors)空间的模型。h(hue)表示图像hsv3s空间的色调通道、s(saturation)表示图像hsv3s空间的饱和度通道、v(value)表示图像hsv3s空间的明度通道。{h、s、v}表示图像hsv3s空间任意一个彩色点,其中h表示该彩色点的色调分量值,s表示该彩色点的饱和度分量值,v表示该彩色点的明度分量值。图像hsv3s空间的h通道由该图像所有彩色点的h分量值构成,图像hsv3s空间的s通道由该图像所有彩色点的s分量值构成,图像hsv3s空间的v通道由该图像所有彩色点的v分量值构成。
[0033]
图2是图像rgb空间与hsv3s空间的几何关系图。图2中,o为三维坐标系的原点,分别表示红色分量轴、绿色分量轴、蓝色分量轴,图像rgb空间由红、绿、蓝三色分量轴构成。p是图像rgb空间中任意一个彩色点,p点的红、绿、蓝三色分量值为{r、g、b},彩色点p表示为p(r,g,b)。表示点o和点s连接构成的向量,表示亮度轴。m为六边形ahqjfn的中心,为六边形ahqjfn的边长。图2中,与垂直,与六边形ahqjfn垂直,与六边形ahqjfn处于同一平面。图3是hsv3s空间的投影面几何示意图,图3中的六边
形就是图2中的六边形,当p点位于扇区hmj(或扇区jmn,或扇区nmh)时,θ表示该扇区内的起始向量(或或)和之间的逆时针方向夹角,且0≤θ≤120
°
。
[0034]
h(hue)表示图像hsv3s空间的色调通道、s(saturation)表示图像hsv3s空间的饱和度通道、v(value)表示图像hsv3s空间的明度通道。{h、s、v}表示图像hsv3s空间任意一个彩色点,其中h表示该彩色点的色调分量值,s表示该彩色点的饱和度分量值,v表示该彩色点的明度分量值。图像hsv3s空间的h通道由该图像所有彩色点的h分量值构成,图像hsv3s空间的s通道由该图像所有彩色点的s分量值构成,图像hsv3s空间的v通道由该图像所有彩色点的v分量值构成。具体流程如下:
[0035]
步骤2.1:图像hsv3s空间中彩色点的明度分量值v定义如下:
[0036]
v=max(r,g,b)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0037]
其中r、g、b是步骤2中图像rgb空间中彩色点的红色分量值、绿色分量值、蓝色分量值。max(r,g,b)表示取{r、g、b}中的最大值。
[0038]
步骤2.2:图像hsv3s空间中彩色点的饱和度分量值s定义如下:
[0039][0040]
其中v是步骤2.1中得到的图像hsv3s空间中彩色点的明度分量值。图3中,是六边形的中心m到顶点q连线的长度。
[0041]
步骤2.3:根据步骤2中图像rgb空间彩色点的r、g、b分量值的大小关系,可以构建三个扇区,分别是扇区hmj(v=r),扇区jmn(v=g),扇区jmn(v=b),如图3所示。图像hsv3s空间中彩色点的色调分量值h在三个扇区hmj、jmn、nmh分别求取,表示如下:
[0042][0043]
其中,θ表示起始向量(或或)与之间的逆时针方向夹角,且0≤θ≤120
°
。当v=r时,起始向量为当v=g时,起始向量为当v=b时,起始向量为
[0044]
式(1)、式(2)和式(3)是图像rgb空间任意一个彩色点{r、g、b}转化为图像hsv3s空间对应的彩色点{h、s、v}的模型。当图像rgb空间所有彩色点转换为图像hsv3s空间对应的彩色点后,即可获得图像hsv3s空间的h,s,v三通道。
[0045]
步骤3:求取步骤2中得到的图像hsv3s空间转换为rgb空间的模型。通过求解步骤2中式(1),式(2)和式(3),可以得到图像hsv3s空间转换为rgb空间的模型如下:
[0046][0047][0048][0049]
式(4)、式(5)和式(6)将图像hsv3s空间任意一个彩色点{h、s、v}转化为图像rgb空间对应的彩色点{r、g、b}。当图像hsv3s空间所有彩色点转换为图像rgb空间对应的彩色点后,即可获得图像rgb空间的r、g、b三通道。
[0050]
以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。