1.本发明涉及感应电机转子磁场测量技术领域,更具体的,涉及转子磁场位置测量方法、采用该转子磁场位置测量方法的转子磁场位置测量装置,均用于对感应电机转子磁场测量;以及该转子磁场位置测量方法的应用,应用在获取感应电机控制参数。
背景技术:
2.转子磁场定向控制由于其优异的解耦特性,被广泛应用于高性能永磁同步电机与感应电机的控制中。其中永磁同步电机转子磁场位置与转子上永磁体磁极方向一致,转子磁场始终随转子同步旋转,因此可直接利用光电编码器或旋转变压器等传感器对其磁场位置进行精确测量。然而,感应电机中为产生驱动或制动转矩,其转子磁场旋转频率与转子机械旋转频率之间存在滑差,且滑差的大小随着工作点的不同而动态改变,致使无法利用传统位置传感器直接测量转子磁场位置。
3.为实现面向感应电机的转子磁场定向控制,国内外学者针对转子磁链位置估计开展了大量的研究工作,构建了基于电流-磁链模型、电压-磁链模型、磁链观测器模型等基于电机模型参数的转子位置实时估计方法,取得了显著的研究成果以及大量的工业应用案例。然而,车用感应电机普遍工作在高温、强磁饱和、宽转速区间,不同工作状态下的电机参数呈现显著变化,为构建精确的转子磁链位置估计模型,需要对不同工作点下的电机参数进行标定,而多数电机参数的标定需要以准确的转子磁场位置输入作为前提。
4.由于目前尚未提出对感应电机的转子磁场位置实时测量的有效方法,致使:1)难以评估所构建的转子磁场位置估计方案在不同工况下的精度,2)难以获取不同工作点下感应电机的各项参数,最终影响到感应电机驱动系统转矩精度、系统效率、外特性范围等各项关键性能指标。
技术实现要素:
5.基于此,有必要针对现有缺少对感应电机的转子磁场位置实时测量的有效方法的问题,提供感应电机转子磁场位置测量方法、装置及应用。
6.本发明采用以下技术方案实现:
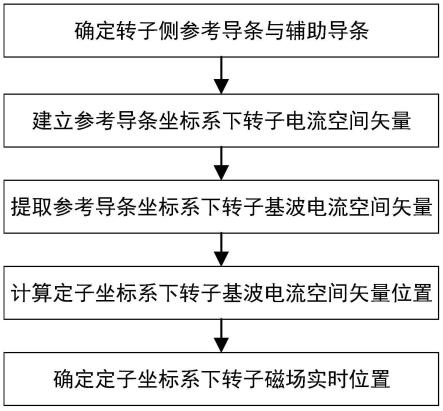
7.第一方面,本发明公开了感应电机转子磁场位置测量方法,包括以下步骤:
8.s1,确定转子侧参考导条与辅助导条;
9.其中,s1包括:选取转子的其中一根导条为参考导条,接着基于参考导条确定辅助导条;
10.s2,建立参考导条坐标系下转子电流空间矢量
11.其中,t表征时间;参考导条坐标系为以参考导条空间位置为横坐标轴、超前参考导条空间电角度为纵坐标轴的坐标系;
12.s3,提取参考导条坐标系下转子基波电流空间矢量
13.s4,计算定子坐标系下转子基波电流空间矢量位置θ
ir
(t):
14.s5,确定定子坐标系下转子磁场实时位置θm(t);
15.其中,若在电机输出正扭矩工况下,转子磁场位置为
16.若在电机输出负扭矩工况下,转子磁场位置为:
17.该感应电机转子磁场位置测量方法实现根据本发明公开的实施例的方法或过程。
18.第二方面,本发明公开了感应电机转子磁场位置测量装置,其使用了第一方面所述的感应电机转子磁场位置测量方法。
19.转子磁场位置测量装置包括传感器模块、信号传输模块、信号计算模块。传感器模块用于获取参考导条与辅助导条的实时电流。信号传输模块用于传递传感器模块的信号。信号计算模块用于接收信号传输模块的传递的转子电流信号、以及电机控制器采集的转子位置信号和转差信号,并计算得到转子磁场实时位置。
20.第三方面,本发明公开了第一方面所述的感应电机转子磁场位置测量方法的应用,即应用于获取感应电机控制参数。
21.该感应电机转子磁场位置测量方法的应用实现根据本发明公开的实施例的方法或过程。
22.与现有技术相比,本发明具备如下有益效果:
23.1,本发明提供了感应电机转子磁场位置测量方法,测量所得的转子磁场位置可以作为转子磁场位置真值,用于评估并修正不同的转子磁场位置估计方法,以提升实际应用中转子磁场位置的估计精度,进而提升感应电机驱动系统的转矩精度、系统效率、外特性范围等关键性能指标。
24.2,本发明对转子电流空间矢量进行了精确提取,先通过反向矢量变换并进行滤波处理,再进行正向矢量变换转换成转子基波电流空间矢量,消除了转子电流空间矢量谐波对于磁场位置估计的影响,使后续测量结果更加准确。
附图说明
25.图1为本发明实施例1中感应电机转子磁场位置测量方法的流程图;
26.图2为图1中采用辅助导条对时位置关系的示意图;
27.图3为图1中转子基波电流空间矢量的提取流程图;
28.图4为本发明实施例2中感应电机转子磁场位置测量装置的结构图;
29.图5为图4中传感器模块的布置图;
30.图6为图4中采用电刷式信号传输模块时的结构图;
31.图7为图4中采用遥测式信号传输模块布置示意图;
32.图8为本发明的应用场景示意图;
33.图9为电机参数标定与磁场位置估计的耦合关系;
34.图10为本发明实施例3中获取电机控制参数的流程图;
35.图11为本发明实施例3中有限元仿真模型;
36.图12为本发明实施例3中转子电流提取计算结果;
37.图13为本发明实施例3中转子磁场位置计算结果;
38.图14为本发明实施例3中转子磁场坐标系下电流、磁链以及电感结果。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.需要说明的是,当组件被称为“安装于”另一个组件,它可以在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是设置在另一个组件上或者可能同时存在居中组件。当一个组件被认为是“固定于”另一个组件,它可以是固定在另一个组件上或者可能同时存在居中组件。
41.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“或/及”包括一个或多个相关的所列项目的任意的和所有的组合。
42.实施例1
43.请参阅图1,图1为本发明中感应电机转子磁场位置测量方法的流程图。本实施例公开了感应电机转子磁场位置测量方法,适用于鼠笼式、绕组式等各类感应电机。
44.感应电机转子磁场位置测量方法包括以下步骤:
45.s1:确定转子侧参考导条与辅助导条。
46.s2:建立参考导条坐标系下转子电流空间矢量其中,t表征时间,后续t表征含义相同,不再重复说明。
47.参考导条坐标系为以参考导条空间位置为横坐标轴、超前参考导条空间电角度为纵坐标轴的坐标系。
48.s1、s2的目的在于基于现有的导条分布,确定出转子侧参考导条与辅助导条,并建立出参考导条坐标系,进而计算出转子电流空间矢量
49.s1先选取转子的其中一根导条为参考导条,接着基于参考导条确定辅助导条。其中对于辅助导条的确定包括两种,第一种是通用情况,第二种是特殊情况(依据感应电机转子相数m,m为4的倍数次)。需要注意的是,两种情况对应的s2也存在不同。
50.具体的:
51.(一)第一种是以逆时针为正方向,选取以超前参考导条空间电角度的位置对称镜像的两根导条均作为辅助导条,并构成辅助导条对。
52.参看图2,图2为图1中采用辅助导条对时位置关系的示意图。为便于说明,图2中将空间电角度等同于空间角度。
53.需要说明的是,转子的导条是周向均匀分布的,这样以超前或滞后参考导条空间
电角度的位置是可以找到对称镜像的两根导条的。
54.在确定辅助导条对后,即进行s2:
55.采用电流传感器获取参考导条的实时电流i
ref
(t)、两根辅助导条的实时电流i
aux1
(t)、i
aux2
(t);
56.将两根辅助导条的实时电流i
aux1
(t)、i
aux2
(t)转换为等效辅助导条电流值i'
aux
(t),其中,δθ为辅助导条对之间的空间电角度之差;
57.建立参考导条坐标系下转子电流空间矢量其中,kw为转子电流归算等效系数。
58.(二)第二种是在感应电机转子相数m为4的倍数次时,也可以逆时针为正方向,选取超前参考导条空间电角度的单根导条作为辅助导条。
59.在确定单一辅助导条后,即进行s2:
60.采用电流传感器获取参考导条的实时电流i
ref
(t)、辅助导条的实时电流i
aux
(t);
61.建立参考导条坐标系下转子电流空间矢量其中,kw为转子电流归算等效系数。
62.上述中提到的电流传感器选取与布置,在后续实施例2中将做进一步描述,在此处暂不展开说明。
63.s3,提取参考导条坐标系下转子基波电流空间矢量
64.s3的目的在于,消除转子电流空间矢量谐波对于磁场位置估计的影响。参看图3,图3即为转子基波电流空间矢量的提取流程图,其中lpf即为低通滤波器、用于滤除高频。
65.具体的,s3包括:
66.s301,获取稳态工况下的实时感应电机转差ωf(t),通过积分运算∫ωf(t)dt得到转差空间角度
67.其中,感应电机转差ωf(t)为定子磁场旋转与转子旋转电角速度之差;定子磁场旋转电角速度基于电机控制器计算三相定子电流频率获取,转子旋转电角速度基于电机控制器对位置传感器解码获取。
68.s302,对参考导条坐标系下的转子电流空间矢量进行空间角度为的矢量变换得到变换后的电流矢量
69.s303,对变换后的电流矢量的实部与虚部分别进行滤波处理,并对滤波后的信号再进行空间角度为的矢量变换,得到转子基波电流空间矢量其中,滤波处理可采用低通滤波器。
70.s4,计算定子坐标系下转子基波电流空间矢量位置θ
ir
(t)。
71.定子坐标系为以定子a相绕组方向为横坐标,超前a相绕组空间角度为纵坐标的直角坐标系。s4的目的在于获取转子电流空间矢量在定子坐标系的实时位置θ
ir
(t),也就是相对于定子a轴的角度。
72.具体的,s4包括:
73.s401,获取参考导条相对于定子a轴的实时空间位置,记为θ0(t);
74.其中,θ0(t)可利用电机控制器自带的位置/速度传感器获取。
75.s402,计算转子基波电流空间矢量的角度记为θ1(t);
76.参看图2,的计算即基于转子基波电流空间矢量的实部、虚部,采用反三角函数得到。例如,依据实部、虚部计算正切值,正切值=虚部/实部,再通过反正切得到当然也可依据实部、虚部计算正弦值,再通过反正弦得到
77.s403,计算转子基波电流空间矢量在定子坐标系的实时位置θ
ir
(t),其中θ
ir
(t)=θ0(t) θ1(t)。
78.s5,确定定子坐标系下转子磁场实时位置θm(t)。
79.s5是利用稳态下转子磁场方向m轴电流分量i
rm
(t)为0的特性,这样s4中的θ
ir
(t)即为超前或滞后转子磁场方向的t轴电流分量i
rt
(t)实时位置。
80.根据电机驱动(输出正扭矩)与发电(输出负扭矩)两种工况下对t轴电流分量的正负关系,转子磁场实时位置可表示为:
81.(a)电机输出正扭矩工况下,转子磁场实时位置为:
82.(b)电机输出负扭矩工况下,转子磁场实时位置为:
83.实施例2
84.本实施例提供了感应电机转子磁场位置测量装置,使用了实施例1的感应电机转子磁场位置测量方法,关于转子磁场位置测量方法不再赘述。
85.参看图4,转子磁场位置测量装置包括传感器模块、信号传输模块、信号计算模块。传感器模块用于获取参考导条与辅助导条的实时电流。信号传输模块用于传递传感器模块的信号。信号计算模块用于接收信号传输模块的传递的信号以及电机控制器计算的转差与参考导条位置信号,并计算得到转子磁场实时位置。
86.对于传感器模块,基于实施例1中确定参考导条与辅助导条位置后,在导条上布置罗氏线圈或霍尔式电流传感器,用于将转子导条实时电流转换为模拟电信号。需要注意的是,传感器的参数与布置需充分考虑导条电流范围、导条温度以及旋转平衡等性能指标。
87.当然,参看图5,传感器模块中不限于电流传感器,还可集成热敏电阻式温度传感器,用于将转子导条实时温度转换为模拟电信号,便于拓展其他功能,此处不再延伸说明。
88.根据应用需求不同,信号传输方式可分为电刷式或遥测式两种,两种传输方式的信号传输模块与信号计算模块不同。
89.(一)采用电刷式的信号传输模块
90.参看图6,信号传输模块包括多个电刷环。电刷环设置在电机转子外圈,与电机转子同步旋转。传感器模块的供电线与信号线固定连接于电刷环内测,电刷环外侧将模拟电信号传递至信号计算模块中。
91.信号计算模块包括电源转换电路、信号处理电路、信号通讯电路、微控制器。电源转换电路将外接输入电源转换为不同等级电压,用于微控制器、信号处理电路、信号通讯电路、传感器模块供电。信号处理电路用于对模拟电信号进行转换、放大或抗干扰处理。微控制器使用实施例1的转子磁场位置测量方法实时计算出转子磁场实时位置,并按照高速通讯协议对计算结果进行编码处理。信号通讯电路用于实时获取转子磁场实时位置,并将实时输出编码后的结果信号。
92.其中,本设计中提到的外接输入电源一般为12v直流电源,12v的直流电源经过电源转换电路后,再给传感器模块以及其他处理电路供电。
93.(二)采用遥测式信号传输模块
94.参看图7,信号传输模块设置在电机转子上,与电机转子同步旋转。信号传输模块包括内置电源、信号处理电路、无线发射电路。内置电源为同步旋转电池或采用无线电能传输。信号处理电路用于对模拟电信号进行转换、放大或抗干扰处理。无线发射电路用于将处理后的模拟电信号通过传输协议发送至信号计算模块。
95.信号计算模块包括电源转换电路、无线接收电路、信号通讯电路、微控制器。电源转换电路将外接输入电源转换为不同等级电压,用于微控制器、信号处理电路、信号通讯电路、无线接收电路供电。无线接收电路用于实时接收处理后的模拟电信号。微控制器使用实施例1的转子磁场位置测量方法实时计算出转子磁场实时位置,并按照高速通讯协议对计算结果进行编码处理。信号通讯电路用于实时获取转子磁场实时位置,并将实时输出编码后的结果信号。
96.其中,本设计中的外接输入电源为12v直流电源,其与内置电源是不同的两个部件。内置电源是与电机转子同步旋转的。
97.基于上述测量装置,即可对感应电机的转子磁场位置进行测量。参看图8,1)在感应电机控制系统开发阶段,可利用本发明方法/装置对感应电机测试样机进行改造,实现转子磁场位置的实时测量,进而完成不同工作点下的电机参数的精确测量、转子磁场位置估计方案评估与改进以及其他控制软件性能的提升;2)在产品应用阶段,将优化后的控制软件部署到量产的感应电机驱动系统中,实现感应电机性能的提升。
98.实施例3
99.如背景技术中提到的,电机参数标定和转子磁场位置是相互关联的,如图9所示。
100.本实施例提供了实施例1的转子磁场位置测量方法的应用,即应用于获取感应电机控制参数,该应用基于有限元仿真进行。实际上也等价于基于实施例2测量装置的实际感应电机参数标定方法。参看图10,具体步骤包括:
101.步骤一,确定感应电机稳态有限元仿真工作点,包括但不限于定子电流幅值is、定子电流电频率ωs、转子电频率ωr三个状态量组合(is,ωs,ωr)。
102.其中,有限元仿真使用电磁仿真软件,包括maxwell、jmag等。选取一个感应电机有限元模型作为仿真模型基础,并设定状态量组合(is,ωs,ωr)的数值。
103.步骤二,提取电磁量仿真结果。利用有限元仿真提取稳态下定子坐标系下不同电磁量,包括但不限于三相定子磁链三相定子电流参考导条与辅助导条电流、三相定子电感参数矩阵
104.其中,参考导条与辅助导条电流利用场计算器可以直接获得。
105.步骤三,计算定子坐标系下转子磁场实时位置。基于实施例1的转子磁场位置测量方法计算出定子坐标系下转子磁场的实时位置θm(t);此处不再重复。
106.步骤四,计算转子磁场定向下的控制参数。利用坐标变换计算转子磁场坐标系下的电磁量,引入坐标变换矩阵,如式(1):
[0107][0108]
忽略m-t轴之间的交叉耦合,则转子坐标系下的定子磁链定子电流定子电感可利用下式(2)、(3)、(4)获得:
[0109][0110][0111][0112]
其中,定子电感包含定子m轴自感定子t轴自感
[0113]
利用式(5)获得转子时间常数tr:
[0114][0115]
利用绕组归算与坐标变换计算出转子坐标系下的转子等效电流并利用式获得定转子之间互感
[0116][0117]
根据转子磁链在t轴上分量为0,依据式(7)求出t轴转子等效自感磁链
[0118][0119]
当然,通过变更感应电机仿真工作点,并重复上述步骤一至步骤四,即可获得不同工作点下的电机控制参数,获取的参数可用于控制器的设计以及仿真模型的构建。
[0120]
下面以某款车用感应电机有限元模型为实例,对上述的转子磁场位置计算方法以及电机参数获取方法进行实施,其中以单个工作点为例进行了仿真。
[0121]
本实例选取的工作点o为:(is=50a,ωs=314rad/s,ωr=289rad/s)。
[0122]
参看图11,为某2对极鼠笼式感应电机有限元仿真模型,选取的参考导体与辅助导条位置如图11中所示。
[0123]
经过上述转子磁场位置计算方法以及电机参数获取方法,结果参看图12、图13、图14及表一。
[0124]
其中,图12自上而下依次为:参考导体与辅助导条电流、参考导条坐标系下转子电流空间矢量、去除谐波后的参考导条坐标系下转子电流空间矢量。图13为根据转子电流矢量以及转子空间位置确定的定子坐标系下转子磁场位置。图14自上而下分别为:转子磁场坐标系下的m-t轴定子电流、转子磁场坐标系下的m-t轴定子磁链、转子磁场坐标系下的m-t轴定子自感。
[0125]
考虑到转子磁场定向m-t坐标系下,各参数在稳态值基本为常值,故对各个参数在时域上做平均,最终得到的控制参数如表1所示:
[0126]
表1工作点o下感应电机参数获取结果
[0127][0128]
实施例4
[0129]
本实施例还公开了一种可读存储介质,所述可读存储介质中存储有计算机程序指令,所述计算机程序指令被一处理器读取并运行时,执行上述的感应电机转子磁场位置测量方法。
[0130]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0131]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。