1.本发明涉及用于机动车辆的混合动力传动装置领域。本发明更特别地涉及一种用于控制机动车辆的混合动力传动系的方法,该混合动力传动系包括内燃发动机、主电机(electric machine)以及机械地连接至内燃发动机的辅助电机。
背景技术:
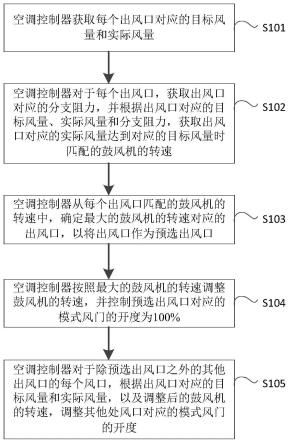
2.混合动力传动装置架构(其中动力传动系包括主电机以及被称为“高压起动发电机”(hsg)的辅助电机,该辅助电机机械旋转地连接至内燃发动机)是众所周知的,特别是通过图1给出的混合动力传动装置架构的示例。这种辅助机的存在可以为传动装置增加大量功能性,尤其是在内燃发动机的起动速度方面。
3.根据图1的示例,混合动力传动系1包括内燃发动机2(ice)、主电机3(me)和辅助电机4(hsg)。这两个电机电连接至车辆的蓄电电池bat。动力传动系1包括:实心主轴5,该实心主轴连接至发动机2;空心主轴6,该空心主轴与实心主轴同轴、连接至主电机3;副轴7;以及实心辅助轴8,该实心辅助轴通过辅助电机的固定输入小齿轮9与辅助轴8承载的固定辅助联接小齿轮10接合来连接至辅助电机4。实心主轴5还承载固定主联接小齿轮11,该固定主联接小齿轮与辅助轴8的固定辅助联接小齿轮10接合,从而确保运动持续传输至辅助轴8。连接到实心主轴5的内燃发动机2因此永久连接到辅助电机4。换言之,这两个动力机(分别为内燃发动机2和辅助电机4)根据齿轮传动系9、10、11形成的比率以成比例的速度系统地转动。
4.齿轮传动比的接合和脱离接合由具有可以在轴上进行轴向移动的犬式齿或平齿(也被称为“爪”)的联接系统确保,该联接系统不受同步装置的控制。犬式齿在朝向轴向固定的小齿轮的方向上受到控制,这些小齿轮在它们的轴上空转。可移动犬式齿与小齿轮的接合使轴和小齿轮接合,从而以接合的传动比将转矩传递到车轮。
5.在此,传动装置使用了三个具有犬式齿的联接系统c1、c2、c3。这是半自动类型的变速箱,也就是说其操作与手动变速箱相同,但挡位变换是以自动方式借助于用于使犬式齿接合和脱离接合的致动系统进行的。
6.变速箱将来自发动机2、来自主电机3以及来自辅助电机4的转矩在副轴7上结合,朝向车辆的车轮方向。挡位变换在分别布置在实心主轴5、副轴7以及中间轴8上的具有犬式齿的三个联接系统c1、c2、c3的控制下进行。放置在实心主轴5上的第一联接系统(被称为主联接器c1)使得可以接合对应于传动装置的第二减速比的短燃烧发动机传动比(在左边)并且接合对应于传动装置的第四减速比的长燃烧发动机传动比(在右边)。放置在副轴7上的第二联接系统(被称为副联接器c2)使得可以接合主电机的两个电动传动比ev1和ev2。放置在辅助轴8上的第三联接系统(被称为传递联接器c3)使得可以将转矩从辅助电机4传递至副轴7(右侧)或空心主轴6(左侧)。
7.通过这种架构,可以接合纯燃烧发动机传动比(其中仅第一主轴机械地连接至副
轴)、纯电动传动比(其中仅第二主轴机械地连接至副轴)、以及混合动力传动比(其中第一主轴和第二主轴二者均机械地连接至副轴)。
8.这种变速箱的一种特定运行模式是所谓的串联式混合动力模式。在这种模式下,主电机3经由电动传动比ev1或ev2连接到车轮。联接到辅助电机4的内燃发动机2保持在空挡,也就是说它不向车轮传递转矩,而是在转动,这提供了经由联接到内燃发动机的辅助电机4向内燃发动机提供转矩并且因此为电池充电(或直接向主电机3供电)的可能性。因此,在串联式混合动力模式下,内燃发动机驱动作为发电机运行的辅助电机,并且向电池以及可能地向主电机提供电能。主电机本身向车轮提供机械动力。能量因此从内燃发动机经过辅助电机串联地传递到电池或主电机。
9.在这种串联式混合动力模式下,主电机3因此是唯一经由电动传动比ev1或ev2联接到车辆车轮的动力机。因此这种模式的优点之一在于,可以使用主电机3来驱动车辆,而由内燃发动机驱动的辅助电机4作为发电机运行。因此可以将传动装置置于对内燃发动机有益的效率点,从而使得在产生充电功率的同时调节与噪声约束相适应的目标速度(从而主要避免过高速度),并且使车轮以低速转动,因为是主电机使车轮转动。因此,这种模式在低速时是尤其有益的,在这时没有齿轮传动比可以接合内燃发动机(因为它将会有过低的速度)。在这种模式下,通过调节来选择内燃发动机的转速,使得其即使在车辆停止的状态下也可以运行,并且对电池进行充电以便为车辆的耗电器或主电机供电,以确保车辆可以开走。
10.然而,内燃发动机和辅助电机不具有相同的转矩产生动力学特性。因此,电控制的辅助电机的响应将比内燃发动机的响应快得多。因此,在这种模式下,辅助电机的速度调节计算要被施加到辅助电机的转矩。要求内燃发动机并行地产生功率。考虑到为了确保速度平衡,辅助电机必须能够吸收内燃发动机产生的所有功率,由此推断,提供给车辆的ht电网(与车载电网的12v低压相比电压较高)的电功率(以向电池并且可能地向主电机提供电能)将相当于内燃发动机提供的功率,而效率相当。
11.由此带来的问题是如何管理以精确地控制内燃发动机提供的功率。尤其后者在产生所要求的转矩方面相当不精确。因此在向发动机要求的设定转矩与实际产生的转矩之间常常存在高达几十nm的误差。例如,如果发动机过度地产生所要求的转矩,那么可能会出现两种情况。如果辅助电机/电池单元能够吸收内燃发动机提供的过剩功率,那么将调节设计成增大辅助电机的充电功率以将发动机速度保持在其设定值。这时的影响不是很大,因为充电功率仅会高于预期。
12.相比之下,如果辅助电机/电池单元不能吸收内燃发动机提供的过剩功率,那么速度调节将辅助电机控制在其能力极限。然而,由于内燃发动机提供更多功率,速度调节将在饱和状态下开始并且内燃发动机/辅助电机单元的速度将增加,可能直到达到内燃发动机的峰值转速限制(最大允许速度),这将大大降低其转矩,因此这在噪声方面是非常不为人喜的,更何况如上所述,串联式混合动力模式尤其是在低速时使用,因此如果该情况发生,则任何外部噪声都将无法掩盖速度的激增。
13.为解决该问题,一个解决方案在于显著增大辅助电机尺寸,从而使其总是能够吸收内燃发动机提供的过剩功率。然而,出于成本/大小原因,这种解决方案不可取。一个简单的解决方案在于,在计算向内燃发动机要求的功率时,在辅助电机/电池单元的潜在能力方
面留出裕量。例如,如果辅助电机/电池单元只能充电20kw,那么通过采取20%的裕量,向内燃发动机要求的功率不超过16kw。
14.然而,在电池不再容许充电功率的情况下(例如可容许的充电功率小于5kw),该裕量系统无法运行。这种情况可能在寒冷条件、尤其低于-15℃的情况下发生,这时电池仅能支持几kw的充电功率。这种情况也可能在长时间充电后出现,因为电池会调节其充电功率。而且,在抬脚和踩下制动踏板时,主电机会给电池充电,因此使用了电池的所有潜在充电能力,而没有给辅助电机留下任何可用的充电功率。在所有这些情况下,观察到了非常低的潜在充电功率并且在潜在能力方面提供的裕量变得低效。
15.具体地,即使例如潜在充电功率等于2kw时采取20%的裕量,也相当于向内燃发动机要求1600w。当将发动机的速度调节到约1500rpm的目标值时,对于1600w的功率,向该发动机要求的转矩将会为10nm。然而,如上文指出的,相对于所要求的设定转矩,发动机可能具有几十nm的误差。因此在这种情况下,无法采取足够的裕量,因为这相当于向发动机要求零转矩以防止发动机过度地产生所要求的10nm的转矩的情况。
技术实现要素:
16.鉴于上述情况,本发明的目的是提供一种用于控制机动车辆混合动力传动系的方法,该方法克服了上述在串联式混合动力模式的极限状态下的缺陷。更特别地,本发明旨在使得可以在传动装置的串联式混合动力模式下补偿内燃发动机过度地产生转矩的误差。
17.为此,本发明涉及一种用于控制具有混合动力电动传动装置的用于机动车辆的动力传动系的方法,该动力传动系包括内燃发动机、主电机以及机械旋转地连接到该内燃发动机的辅助电机,所述两个电机连接到车辆的蓄电电池,所述方法包括,在主电机单独产生朝向车辆的车轮的机械动力并且内燃发动机驱动作为发电机运行的辅助电机来产生充电功率的串联式混合动力传动模式下,将发动机速度调节为设定值的步骤,其中所述发动机的转矩是基于要被施加到所述辅助电机的转矩设定点来进行控制的,所述方法的特征在于,该方法包括:检查所述辅助电机的转矩控制饱和的状况的步骤;以及在饱和的情况下,校正向内燃发动机要求的转矩使得发动机速度回到其设定值的步骤。
18.有利地,根据对所述辅助电机的转矩设定点与辅助电机能够产生的最大潜在转矩之间保持的转矩裕量相对于要保持的给定的最小转矩裕量值进行调节来执行校正向内燃发动机要求的转矩的步骤,所述调节可以确保所述辅助电机的所述最小转矩裕量值,从而确保速度的稳定性。
19.有利地,从最小转矩裕量值开始,该调节计算用于校正与辅助电机的饱和有关的内燃发动机的转矩的值,该值旨在校正向内燃发动机要求的目标转矩。
20.有利地,辅助电机能够产生的最大潜在转矩与辅助电机/电池单元能够产生的最大潜在充电功率相对应。
21.有利地,当辅助电机的转矩接近饱和值时,触发校正向内燃发动机要求的转矩的步骤。
22.有利地,所述饱和值与所述辅助电机能够产生的最大转矩值相对应。
23.有利地,当内燃发动机过度地产生所要求的转矩时,触发校正向内燃发动机要求的转矩的步骤。
附图说明
24.通过以下参照附图以非限制性的指示的方式给出的描述,本发明的其他特征和优点将会变得更清楚明了,在附图中:
25.[图1]是用于混合动力传动车辆的动力传动系架构的示例,在该动力传动系架构上可以实现本发明的控制方法;
[0026]
[图2]是在本发明的方法中执行的第二调节的框图;
[0027]
[图3a至图3e]是展示了在本发明的方法期间,内燃发动机和辅助电机的转矩以及发动机转速的变化的曲线图。
具体实施方式
[0028]
如参考图1可见,在传动装置的串联式混合动力模式下,关于设定值、特别是与噪声约束相适应的设定值(通常是可以避免过高速度的设定值)的速度调节是由辅助电机4进行的,并且是通过辅助电机4与内燃发动机2之间产生转矩的不同动力性特征来实现的。为此目的,如图2所示,将串联式混合动力模式的速度调节设计成计算要被施加到在发电机模式下运行的辅助电机的转矩设定点c_req_hsg以产生给定的充电功率,同时将速度调节到设定值,而并行地向内燃发动机2要求根据代表充电目标的转矩目标target_ice_basic来产生功率。
[0029]
当进入串联式混合动力传动时,内燃发动机/辅助电机单元的速度调节因此包括确定要被施加到辅助电机的转矩设定点,并且包括在这个转矩设定点的基础上并行地控制内燃发动机以产生对应的功率。
[0030]
本发明旨在可以在串联式混合动力模式下最佳管理辅助电机的饱和情况。
[0031]
当辅助电机的转矩过于接近饱和值(其对应于辅助电机可以产生的最大转矩值)时,就有产生辅助电机的这些饱和情况的风险。当内燃发动机过度地产生向其要求提供的转矩并且辅助电机/电池单元不能吸收内燃发动机提供的过剩功率时,会出现辅助电机的这种最大转矩饱和。在这种情况下,速度调节控制辅助电机到达其能力极限。辅助电机的饱和使得无法遵循提供更多功率的发动机的转矩轨迹,这意味着存在超速的风险。
[0032]
为了解决这个问题并且为了在串联式混合动力模式下最佳地管理辅助电机的饱和情况,本发明的原理在于除了速度调节之外增加第二调节,该第二调节被设计成调节发送至辅助电机的转矩设定点(由速度调节计算)与辅助电机可以产生的最大潜在转矩之间保持的转矩裕量margin_hsg。该最大潜在转矩是从辅助电机/电池单元可以产生的最大潜在充电功率获得的。
[0033]
因此只有在检测到辅助电机的转矩过于接近其饱和极限值时,第二调节才会介入,并且只有在这种情况下才可以降低内燃发动机的转矩设定点,使得速度回到控制之下,也就是说回到其设定值。因此当第一调节(即辅助电机执行的速度调节)饱和时,该第二调节就会发挥作用。
[0034]
回到如上给出的示例(其中将发动机的速度调节到约1500rpm的设定值,并且其中对于1600w的目标功率,向内燃发动机要求的转矩为10nm),因此内燃发动机的开环控制是在与所要求的转矩为10nm相对应的转矩目标target_ice_basic的基础上进行的。如果内燃发动机不过度地产生所要求的转矩,那么辅助电机完全能够吸收内燃发动机提供的功率,
因此第二调节将不会介入。
[0035]
另一方面,在内燃发动机过度地产生转矩目标target_ice_basic的情况下,辅助电机将达到吸收内燃发动机提供的非要求的额外功率的饱和,因此第二调节将介入。该第二调节在考虑到由速度调节计算的转矩设定点c_req_hsg的情况下将辅助电机的保持的转矩裕量margin_hsg作为输入,并且将调节保持的转矩裕量,以确保辅助电机始终保持预定的最小转矩裕量值cmin_hsg,从而可以确保速度的稳定性。换言之,最小转矩裕量值cmin_hsg可以限定用于调节辅助电机的与辅助电机的饱和相关的转矩裕量的目标。然后将辅助电机的转矩裕量调节设计成计算与辅助电机的饱和有关的内燃发动机的转矩校正值c_cor_ice,该转矩校正值旨在校正向内燃发动机要求的转矩目标target_ice_basic。将校正值c_cor_ice施加到转矩目标target_ice_basic提供了内燃发动机的最终转矩设定点c_req_ice,使得可以管理辅助电机的饱和。该第二调节例如使用积分调节器,该积分调节器将从速度调节获得的饱和转矩与最大允许的充电转矩(从中减去调节的目标裕量)之间的差异作为输入。如果动力要求更高,也可以也可以添加比例分量。
[0036]
图3a至图3e是展示了在本发明的方法期间,在模拟辅助电机的电池侧突然失去潜在充电能力的测试情况下(也就是说在这些情况下,电池没有为辅助电机留下可用的充电功率)内燃发动机和辅助电机的转矩变化以及发动机速度变化的曲线图。这通常是抬脚的情况,这时充电功率由主电机提供以例如满足驾驶员的期望。图3e展示了这种现象,该图示出了电池侧潜在充电能力p_bat的曲线,该曲线从基本上35kw的可能的潜在充电能力迅速上升到0kw。如图3d所示,电池侧潜在充电能力的这种突然下降表现为辅助电机的可用潜在转矩p_hsg(负值,因为处于充电模式)上升到由速度调节向辅助电机实际要求的转矩c_req_hsg这一事实,这导致了辅助电机的饱和。如图3c所示,由于内燃发动机响应缓慢,其转矩无法以与辅助电机相同的动态减小,因此发动机转速r会相对于速度设定值r_req_ice短暂增加。在辅助电机的这种饱和情况下,本发明方法执行的第二调节将如上所述可以降低向内燃发动机要求的转矩,直到速度恢复到其设定值r_req_ice。因此,根据该示例,可以从图3c看出,转速r增大了500rpm,然后逐渐返回到其设定值r_req_ice。如果不执行第二调节,则速度将达到超过6000rpm的峰值转速限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。