1.本发明涉及胶囊机器人技术领域,特别是涉及一种磁引导采样胶囊机器人及采样方法。
背景技术:
2.根据who的数据表明,全球有胃肠疾病史的人高达80%,而我国的肠胃病患者约有1.2亿之多。其中,消化道溃疡发病率10%,慢性胃炎发病率30%。近年来,胃病发病趋向年轻化,越来越多的年轻人患上胃病。更需要注意的是,在19~35岁的青年人胃癌发病率比30年前翻了一倍。而这背后的原因来自于对于早期胃病的忽视,错过了最佳治疗时间,导致由慢性胃炎转变为致命的胃癌。因此,对于胃病患者而言,早发现早治疗是使其远离胃癌的最佳手段。
3.临床医学表明早期慢性胃炎/消化性溃疡都是由胃黏膜受损演变而来的。胃消化性黏膜损伤疾病及其并发症的治疗在医学上仍然是一个挑战。非甾体类抗炎药(nsaids)、幽门螺旋杆菌感染、低剂量阿司匹林、吸烟、过量饮酒、情绪紧张和社会心理因素也日益成为黏膜损伤及其并发症的重要原因。相较于其他致病因素,幽门螺杆菌以其胃酸高度适应性、胃黏膜高度滞留性、高度耐药性成为消化性溃疡、慢性胃炎及胃恶性肿瘤的主要致病因素之一。因此要对幽门螺杆菌进行有效的清除,需要对幽门螺杆菌菌株种类信息进行分析,以便调整用药的组合达到更好的治疗效果。
4.临床上对于胃部疾病的采样检测方法主要有三种:1.c13/c14呼气试验,能够快速的检测出患者胃部幽门螺杆菌的数量,该方法获取的信息也仅限于此,对于相应病情的判断未提供有效的信息。2.胃镜检查,通过胃镜中的活检钳夹取病变组织,通过对取出的组织进行培养分析,能够对疾病的发展做出有效、精准的判断。但该方法除了会使患者感到不适的同时,容易对胃黏膜造成损害,因此往往需要具有熟练技术的医师进行操作。3.作为胃镜的替代者胶囊内窥镜,其能够以无创的方式进入人体胃部,通过图像、视频的方式向医师传递病理信息,但是不同病症在不同的发展阶段容易出现相似的图像特征,加大了疾病诊断的难度,容易造成病情的误判。然而,对于上述提及的临床方法,在疾病诊断的准确性和患者友好性之间存在矛盾。因此,依旧需要一种无创、高效的幽门螺杆菌采样方案。
5.对于无创操作而言,磁场由于其穿透性强、生物相容性好、控制精准等优点被视为无创操作的主要驱动方式。因此,磁驱动机器人在活检领域受到研究学者的热捧。
6.对于磁引导采样胶囊机器人而言,根据其采样模块的不同,能够讲其分为三大类:刀片式、针刺式、钳夹式。一、刀片式,利用刀片锋利的边缘实现活体组织的切割。对于其触发方式,逐渐由单次的热触发向磁引导的多次触发转变。二、针刺式,利用细针扎入组织内部获取样本,通过外部施加梯度磁场,胶囊内部的磁体被吸引,带动细针从胶囊内部/中间部位伸出完成采样。撤去磁场后细针在微簧/弹性材料的作用下回弹,减少了样品与环境的交互,避免了组织样品的污染。三、钳夹式,利用两个锋利的钳头夹取目标组织的方法。利用外部匀强旋转磁场带动胶囊内部的永磁体发生旋转运动,在永磁体的带动下夹钳伸出张
开,翻转外部旋转磁场,夹钳闭合完成采样的同时回缩到胶囊内部,完成一次取样工作。
7.上述提到的磁引导采样胶囊机器人能够较好的完成病变组织的微量采样,但要对幽门螺杆菌种类进行详细的分析,就需要对胃液和/或黏膜进行批量采样,而上述机器人结构复杂导致采样仓较少,无法胜任该工作。因此面向胃液和/或黏膜的采样工作时,仍需要对磁引导采样胶囊机器人进行重新设计和优化。
技术实现要素:
8.本发明的目的是提供一种磁引导采样胶囊机器人及采样方法,用于病变部位胃液和/或黏膜的采样,能够在外部磁场的作用下实现锚定采样,通过对称设置的第一采样腔和第二采样腔的设计能够实现单次入胃多次采样的操作。
9.为实现上述目的,本发明提供了如下方案:
10.本发明提供了一种磁引导采样胶囊机器人,包括内部磁体、第一柔磁性膜、第二柔磁性膜、第一胶囊壳体和第二胶囊壳体,所述第一胶囊壳体和所述第二胶囊壳体相互扣合形成内部空腔,所述内部磁体位于所述内部空腔,所述第一柔磁性膜和所述第二柔磁性膜分别位于所述内部磁体的两侧,在没有外界磁场的情况下,所述第一柔磁性膜和所述第二柔磁性膜均朝向所述内部磁体凸起,所述第一胶囊壳体上设置有第一采样孔,所述第一胶囊壳体与所述第一柔磁性膜之间形成第一采样腔,所述第二胶囊壳体上设置有第二采样孔,所述第二胶囊壳体与所述第二柔磁性膜之间形成第二采样腔。
11.优选地,所述第一柔磁性膜靠近所述内部磁体的一侧与所述内部磁体靠近所述第一柔磁性膜的一侧相互吸引,所述第二柔磁性膜靠近所述内部磁体的一侧与所述内部磁体靠近所述第二柔磁性膜的一侧相互吸引。
12.优选地,还包括第一磁体支撑板和第二磁体支撑板,所述第一磁体支撑板位于所述内部磁体和所述第一柔磁性膜之间,所述第一磁体支撑板的边缘与所述内部空腔的内部连接,所述第二磁体支撑板位于所述内部磁体和所述第二柔磁性膜之间,所述第二磁体支撑板的边缘与所述内部空腔的内部连接。
13.优选地,所述第一胶囊壳体和所述第二胶囊壳体相互扣合后的外形为胶囊形。
14.优选地,在没有外界磁场的情况下,所述第一采样腔和所述第二采样腔的气压为p1,所述内部磁体产生的梯度力fm=(m
·
▽
)b,其中,m为所述第一柔磁性膜或所述第二柔磁性膜的磁矩的磁矩,b为外部磁场的磁感应强度。
15.优选地,所述第一柔磁性膜和所述第二柔磁性膜的结构相同,所述第一柔磁性膜和所述第二柔磁性膜均包括第一层结构和第二层结构,所述第一层结构采用钕铁硼微粒和聚二甲基硅氧烷的混合材料制成,所述混合材料中的所述钕铁硼微粒和所述聚二甲基硅氧烷的质量比为:2:1,所述第二层结构采用聚二甲基硅氧烷制成。
16.优选地,所述第一胶囊壳体和所述第二胶囊壳体均采用3d打印成型的方式进行制备。
17.本发明还提供了一种采用所述磁引导采样胶囊机器人的采样方法,包括以下步骤:
18.步骤一,将磁引导采样胶囊机器人摄入体内并进入胃部;
19.步骤二,通过调整外部磁场与磁引导采样胶囊机器人之间的距离,使外部磁场在
第一柔磁性膜或第二柔磁性膜处产生的磁感应强度小于内部磁体在同位置处产生的磁感应强度,在该状态下对磁引导采样胶囊机器人进行运动控制,到达指定的位置;
20.步骤三,操纵外部磁场靠近磁引导采样胶囊机器人,产生远大于内部磁体对第一柔磁性膜或第二柔磁性膜产生的吸引力,第一柔磁性膜或第二柔磁性膜向外部磁场方向发生凸起,压缩第一采样腔或第二采样腔,使第一采样腔或第二采样腔内部的气压变为p2,同时由于外部磁场对内部磁体产生的梯度力,使磁引导采样胶囊机器人能够锚定在胃内壁;
21.步骤四,快速撤去外部磁场,第一柔磁性膜或第二柔磁性膜在内部磁体的吸引下回弹,第一采样腔或第二采样腔中的气压由p2变为p1,胃液和/或黏膜进入第一采样腔或第二采样腔;
22.步骤五,翻转外部磁场,在磁力矩的作用下,外部磁场发生180度的翻转,外部磁场产生远大于内部磁体对第二柔磁性膜或第一柔磁性膜产生的吸引力,第二柔磁性膜或第一柔磁性膜向外部磁场方向发生凸起,压缩第二采样腔或第一采样腔,使第二采样腔或第一采样腔内部的气压变为p2,同时由于外部磁场对内部磁体产生的梯度力,使磁引导采样胶囊机器人能够锚定在胃内壁;
23.步骤六,快速撤去外部磁场,第二柔磁性膜或第一柔磁性膜在内部磁体的吸引下回弹,第二采样腔或第一采样腔中的气压由p2变为p1,胃液和/或黏膜进入第二采样腔或第一采样腔,完成二次锚定采样。
24.本发明相对于现有技术取得了以下技术效果:
25.本发明的磁引导采样胶囊机器人利用第一柔磁性膜或第二柔磁性膜的变形实现第一采样腔或第二采样腔的气压变化完成胃液和/或黏膜的获取;第一采样腔和第二采样腔为对称结构,可实现单次入胃多次采样;磁引导采样胶囊机器人在外部磁场的驱动下能够准确到达采样部位,并在外部梯度磁场的作用下实现锚定和采样的同步进行;相较于现有的采样方法,本发明具备采样量大、操作简单且成本低廉的优势。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还能够根据这些附图获得其他的附图。
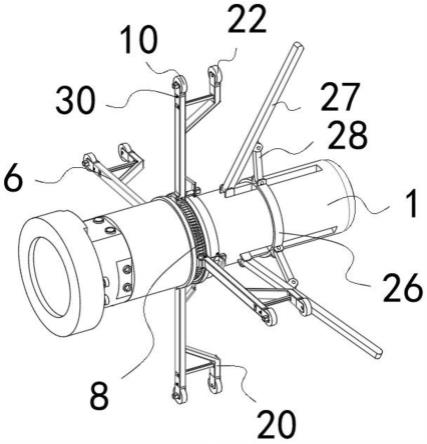
27.图1为本发明的磁引导采样胶囊机器人外部结构示意图;
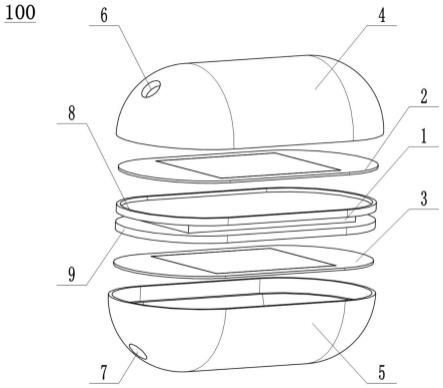
28.图2为本发明的磁引导采样胶囊机器人爆炸图;
29.图3为本发明中磁引导采样胶囊机器人的锚定和采样同步原理图;
30.图4为本发明的采样方法图;
31.其中:100-磁引导采样胶囊机器人,1-内部磁体,2-第一柔磁性膜,3-第二柔磁性膜,4-第一胶囊壳体,5-第二胶囊壳体,6-第一采样孔,7-第二采样孔,8-第一磁体支撑板,9-第二磁体支撑板,10-外部永磁体,11-胃液和/或黏膜。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.本发明的目的是提供一种磁引导采样胶囊机器人及采样方法,用于病变部位胃液和/或黏膜的采样,能够在外部磁场的作用下实现锚定采样,通过对称设置的第一采样腔和第二采样腔的设计能够实现单次入胃多次采样的操作。
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
35.实施例一
36.如图1-图3所示:本实施例提供了一种磁引导采样胶囊机器人100,包括内部磁体1、第一柔磁性膜2、第二柔磁性膜3、第一胶囊壳体4和第二胶囊壳体5,第一胶囊壳体4和第二胶囊壳体5尺寸相同,第一胶囊壳体4和第二胶囊壳体5相互扣合后内部形成内部空腔,第一胶囊壳体4和第二胶囊壳体5相互扣合后的外形为胶囊形,内部磁体1位于内部空腔的中部,第一柔磁性膜2和第二柔磁性膜3分别对称设置于内部磁体1的两侧,在没有外界磁场的情况下,第一柔磁性膜2和第二柔磁性膜3均朝向内部磁体1凸起,第一胶囊壳体4上设置有第一采样孔6,第一胶囊壳体4与第一柔磁性膜2之间形成第一采样腔,第二胶囊壳体5上设置有第二采样孔7,第二胶囊壳体5与第二柔磁性膜3之间形成第二采样腔。患者通过吞服的方式让本实施例的磁引导采样胶囊机器人100进入胃部,本实施例的磁引导采样胶囊机器人100进入人体后,能够通过外部磁场对磁引导采样胶囊机器人100进行控制,在外部磁场的作用下,通过提高外部磁场在第一柔磁性膜2或第二柔磁性膜3处的磁感应强度使外部磁场产生的梯度力大于内部磁体1产生的梯度力,使第一柔磁性膜2或第二柔磁性膜3朝向第一胶囊壳体4或第二胶囊壳体5方向弯曲,压缩第一采样腔或第二采样腔,实现第一采样腔或第二采样腔内部气压下降,同时由于外部磁场对内部磁体1产生的梯度力,使磁引导采样胶囊机器人100能够锚定在胃内壁上方。撤去外部磁场,第一柔磁性膜2或第二柔磁性膜3在内部永磁体的作用下回弹,第一采样腔或第二采样腔的气压发生变化,利用第一采样腔或第二采样腔与外部的气压差完成胃液和/或黏膜11的采样;通过翻转外部磁场,在磁力矩的作用下,磁引导采样胶囊机器人100发生180度的翻转,能够进行二次锚定采样。外部磁场为外部梯度磁场,外部梯度磁场由外部永磁体10提供。
37.具体地,本实施例中,内部永磁体的中心线与磁引导采样胶囊机器人100的中轴线重合,内部永磁体为驱动部件、锚定部件,在外部磁场的作用下,内部永磁体是使磁引导采样胶囊机器人100运动和锚定采样的关键。通过外部磁场的运动带动磁引导采样胶囊机器人100运动,实现病灶部位的导向。当外部磁场与内部永磁体之间的距离缩短,在外部磁场的作用下,使磁引导采样胶囊机器人100底部与胃内壁实现紧密挤压锚定。除此之外,当翻转外部磁场时,内部永磁体相应的发生转向,以此实现二次采样。
38.本实施例中,第一柔磁性膜2靠近内部磁体1的一侧与内部磁体1靠近第一柔磁性膜2的一侧相互吸引,第二柔磁性膜3靠近内部磁体1的一侧与内部磁体1靠近第二柔磁性膜3的一侧相互吸引。例如,第一柔磁性膜2靠近内部磁体1的一侧为n极,第一柔磁性膜2远离内部磁体1的一侧为s极,第二柔磁性膜3靠近内部磁体1的一侧为s极,第二柔磁性膜3远离内部磁体1的一侧为n极,内部磁体1与第一柔磁性膜2相对的一侧为s极,内部磁体1与第二
柔磁性膜3相对的一侧为n极。
39.本实施例中,还包括第一磁体支撑板8和第二磁体支撑板9,第一磁体支撑板8位于内部磁体1和第一柔磁性膜2之间,第一磁体支撑板8的边缘与内部空腔的内部连接,第二磁体支撑板9位于内部磁体1和第二柔磁性膜3之间,第二磁体支撑板9的边缘与内部空腔的内部连接。
40.本实施例中,在没有外界磁场的情况下,第一采样腔和第二采样腔的气压为p1,内部磁体1产生的梯度力fm=(m
·
▽
)b,其中,m为第一柔磁性膜2或第二柔磁性膜3的磁矩,b为外部磁场的磁感应强度。在外部磁场的作用下,第一柔磁性膜2和第二柔磁性膜3向内部磁体1方向发生隆起。
41.本实施例中,第一柔磁性膜2和第二柔磁性膜3的结构相同,第一柔磁性膜2和第二柔磁性膜3为驱动层,在磁场的作用下,是使一采样腔和第二采样腔气压变化的关键。第一柔磁性膜2和第二柔磁性膜3均包括第一层结构和第二层结构,具体地,第一层结构采用钕铁硼微粒和聚二甲基硅氧烷的混合材料制成,钕铁硼微粒的尺寸为5μm,混合材料中的钕铁硼微粒和聚二甲基硅氧烷的质量比为2:1,钕铁硼微粒(ndfeb)和生物相容性的聚二甲基硅氧烷(pdms)混合搅拌得到磁浆,旋涂、干燥得到磁膜。使用cad软件绘制第一柔磁性膜2和第二柔磁性膜3中磁性部分的二维模型,利用激光切割的方式将磁膜完成切割,在磁膜表面旋涂聚二甲基硅氧烷,干燥后得到混合膜,按照cad绘制的第一柔磁性膜2或第二柔磁性膜3的模型对混合膜进行激光切割得到第一柔磁性预制膜或第二柔磁性预制膜。将第一柔磁性预制膜或第二柔磁性预制膜置于充磁机中完成充磁,得到具有特定磁化模式的第一柔磁性膜2或第二柔磁性膜3,使第一柔磁性膜2或第二柔磁性膜3能够响应外部磁场发生形变挤压第一采样腔或第二采样腔,实现第一采样腔或第二采样腔内部的气压变化,利用气压差实现胃液和/或黏膜11的获取。
42.本实施例中,第一胶囊壳体4和第二胶囊壳体5均采用3d打印成型的方式进行制备。第一胶囊壳体4和第二胶囊壳体5的底部分别留有第一采样孔6和第二采样孔7,能够实现第一采样腔和第二采样腔内部气体的排出、胃液和/或黏膜11的吸入,第一采样腔和第二采样腔的作用是完成胃液和/或黏膜11的收集。
43.实施例二
44.如图4所示,本实施例提供了一种采用实施例一的磁引导采样胶囊机器人100的采样方法,包括以下步骤:
45.步骤一,采样前提前准备好需要用的磁引导采样胶囊机器人100,患者通过吞服形式将磁引导采样胶囊机器人100摄入体内并进入胃部;
46.步骤二,通过调整外部磁场与磁引导采样胶囊机器人100之间的距离,使外部磁场在第一柔磁性膜2或第二柔磁性膜3处产生的磁感应强度小于内部磁体1在同位置处产生的磁感应强度,在该状态下对磁引导采样胶囊机器人100进行运动控制,到达指定的位置;
47.步骤三,操纵外部磁场靠近磁引导采样胶囊机器人100,产生远大于内部磁体1对第一柔磁性膜2或第二柔磁性膜3产生的吸引力,第一柔磁性膜2或第二柔磁性膜3向外部磁场方向发生凸起,压缩第一采样腔或第二采样腔,使第一采样腔或第二采样腔内部的气压变为p2,同时由于外部磁场对内部磁体1产生的梯度力,使磁引导采样胶囊机器人100能够锚定在胃内壁;
48.步骤四,快速撤去外部磁场,第一柔磁性膜2或第二柔磁性膜3在内部磁体1的吸引下回弹,第一采样腔或第二采样腔中的气压由p2变为p1,胃液和/或黏膜11利用气压差进入第一采样腔或第二采样腔;
49.步骤五,翻转外部磁场,在磁力矩的作用下,外部磁场发生180度的翻转,外部磁场产生远大于内部磁体1对第二柔磁性膜3或第一柔磁性膜2产生的吸引力,第二柔磁性膜3或第一柔磁性膜2向外部磁场方向发生凸起,压缩第二采样腔或第一采样腔,使第二采样腔或第一采样腔内部的气压变为p2,同时由于外部磁场对内部磁体1产生的梯度力,使磁引导采样胶囊机器人100能够锚定在胃内壁;
50.步骤六,快速撤去外部磁场,第二柔磁性膜3或第一柔磁性膜2在内部磁体1的吸引下回弹,第二采样腔或第一采样腔中的气压由p2变为p1,胃液和/或黏膜11进入第二采样腔或第一采样腔,完成二次锚定采样。
51.本说明书中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。