技术特征:
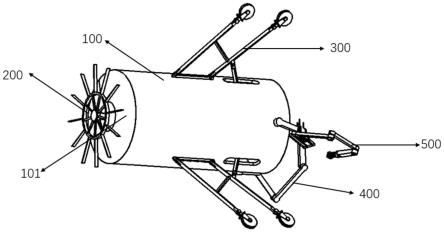
1.一种水下抓取机器人,其特征在于,包括:封闭的机壳,与机壳固定连接的助推器(200)、导向机构(300)、抓取机构(400)、活动检测机构(500)、距离传感器(600);其中,所述机壳包括主壳体(100)、后盖(101)、前盖(102);所述助推器(200),包括螺旋桨(202)及控制其旋转的伺服电机(203),固定在后盖(101)上,为机器人提供水中运动动力;所述导向机构(300)包括三个由导向气缸驱动、均匀分布在机器人周向的连杆轮机构;所述连杆轮机构的末端连杆设置在机壳外,其相对机壳中轴线的张角可控制改变;所述末端连杆后端连接有移动轮(309);抓取机构(400)固定在机壳前侧,包括第一五自由度机械臂和固定在其前端的两指机械手;所述两指机械手上还安装有力传感器,用于检测夹紧力;活动检测机构(500)固定在机壳前侧,包括第二五自由度机械臂和固定在第二五自由度机械臂前端的激光扫描仪(507)、金属探测仪(508);距离传感器(600)固定安装在机壳前盖(102)上。2.根据权利要求1所述的一种水下抓取机器人,其特征在于,所述主壳体(100)为圆柱形;主壳体(100)内孔前、后端开设有圆锥内螺纹;后盖(101)、前盖(102)均包括开设有圆锥外螺纹的内凸台,分别通过锥螺纹与主壳体(100)旋合。3.根据权利要求1所述的一种水下抓取机器人,其特征在于,所述助推器(200)还包括:第一支撑架(201)、联轴器(204)、传动轴(205)、花键轴套(206);第一支撑架(201)为“y”形结构,其中心设置有环形轴套,其三个支撑柱固定在主壳体(100)内部;伺服电机(203)固定连接在第一支撑架环形轴套上,其输出轴穿过第一支撑架环形轴套内孔,与传动轴(205)前端通过联轴器(204)固定连接;传动轴(205)转动支撑在后盖(101)中心孔上,螺旋桨(202)中心通过花键轴套(206)与传动轴(205)后端固定连接。4.根据权利要求1所述的一种水下抓取机器人,其特征在于,所述连杆轮机构包括铰链支架(306)、活动连杆(308)、移动轮(309)、“斜h”形连杆(310)、固定连杆(311);导向气缸固定在主壳体(100)中心;铰链支架(306)固定连接在导向气缸活塞杆(303)上;活动连杆(308)前端与铰链支架(306)铰接,后端穿过主壳体(100)上的孔与“斜h”形连杆(310)中部铰接;“斜h”形连杆(310)前端两端点分别与固定连杆(311)铰接,后端两端点分别与移动轮(309)中心固定连接;固定连杆(311)固定在主壳体(100)上。5.根据权利要求4所述的一种水下抓取机器人,其特征在于,所述导向机构(300),还包括:连接导向气缸活塞杆(303)和铰链支架(306)的驱动轴(305),和支撑导向机构的第二支撑架(301)、第三支撑架(304)、导向轴(307);第二支撑架(301)、第三支撑架(304)均为“y”形结构,其中心设置有环形轴套,其三个支撑柱固定在主壳体(100)内部;导向气缸体(302)固定在第二支撑架(301)的中心轴套上,导向气缸活塞杆(303)固定连接驱动轴(305)前端;驱动轴(305)为中空轴,其外表面与第三支撑架(304)中心环形轴套嵌套、滑动连接;导向轴(307)前端外表面与驱动轴(305)后端内孔嵌套、滑动连接,其后端固定在前盖(102)上;铰链支架(306)固定在驱动轴(305)后端。6.根据权利要求4所述的一种水下抓取机器人,其特征在于,所述“斜h”形连杆(310)的安装方向向机器人前侧倾斜。7.根据权利要求4所述的一种水下抓取机器人,其特征在于,活动连杆(308)与主壳体
(100)连接处设置有与活动连杆(308)同步滑动、但与主壳体(100)保持紧密接触的滑片(1002)。8.根据权利要求1所述的一种水下抓取机器人,其特征在于,所述第一五自由度机械臂包括:第一轴臂(401)、第二轴臂(402)、第三轴臂(403)、第四轴臂(404)、第一旋转座(405);第一轴臂(401)与固定在主壳体(100)上的电机输出轴固定;第一轴臂(401)、第二轴臂(402)、第三轴臂(403)、第四轴臂(404)依次通过旋转电机回转连接,第一旋转座(405)与第四轴臂(404)后端同轴旋转连接。9.根据权利要求1所述的一种水下抓取机器人,其特征在于,所述两指机械手,包括固定板(406)、两个手指(407)、两个手指气缸;固定板(406)上表面固定在第一五自由度机械臂前端,其下表面上设置有t型槽,手指(407)滑动嵌套在t型槽内;两个手指气缸体(410)固定在固定板(406)中部,对应的两个手指气缸活塞杆(411)分别与对应侧手指(407)固定连接。10.根据权利要求1所述的一种水下抓取机器人,其特征在于,所述第二五自由度机械臂包括:第一臂(501)、第二臂(502)、第三臂(503)、第四臂(504)、第二旋转座(505);第一臂(501)与固定在主壳体(100)上的电机输出轴固定;第一臂(501)、第二臂(502)、第三臂(503)、第四臂(504)依次通过旋转电机回转连接;第二旋转座(505)与第四臂(504)后端通过电机同轴旋转连接;第二旋转座(505)上固定有连接架(506),激光扫描仪(507)、金属探测仪(508)固定在连接架(506)上。
技术总结
本发明公开了一种水下抓取机器人,包括:封闭的机壳,与机壳固定连接的助推器、导向机构、抓取机构、活动检测机构、距离传感器;所述机壳包括主壳体、后盖、前盖;助推器,包括螺旋桨及控制其旋转的伺服电机,固定在后盖上;导向机构包括由三个由导向气缸驱动、均匀分布在机器人周向的连杆轮机构;抓取机构固定在机壳前侧,包括第一五自由度机械臂和固定在其前端的两指机械手;活动检测机构固定在机壳前侧,包括第二五自由度机械臂和固定在五自由度机械臂前端的激光扫描仪、金属探测仪;距离传感器固定安装在机壳前盖上。本发明适合在水下,尤其是在水下管道底部抓取金属件等目标物,识别目标物的精度高,抓取可靠,应用前景好。应用前景好。应用前景好。
技术研发人员:张俊杰 何涛 陈细林 王昱琪 贾东昇
受保护的技术使用者:上海工程技术大学
技术研发日:2022.10.26
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。