1.高负荷状态强关联交叉口群链式防堵控制相位差优化方法,属于交通信号控制领域。
背景技术:
2.随着城市的发展,城市交通流量日益剧增,城市道路网密度也逐渐增加,交叉口作为交通流改变流向的地点,相邻交叉口之间的关联性也更加明显,交叉口扮演着重要的角色,对路网中交叉口群的研究也越来越受到人们的重视。因此对网络交叉口群进行子区域划分,采用区域协调控制越来越受到国内外学者的关注。我国城市路网中存在大量的强关联交叉口(间距较短易引发关联效应的相邻交叉口),近年来随着交通压力不断增大,强关联交叉口群在高峰期经常出现关联拥堵问题,使得交叉口秩序混乱和拥堵加剧。
技术实现要素:
3.本发明要解决的技术问题是:克服现有技术的不足,提供一种解决了强关联交叉口群在高峰期易发生双向链式拥堵的问题的高负荷状态强关联交叉口群链式防堵控制相位差优化方法。
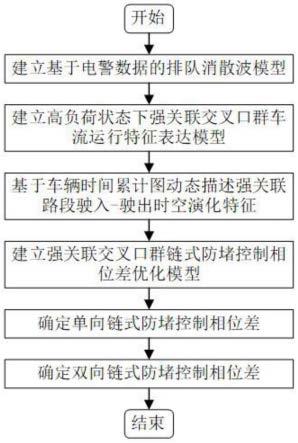
4.本发明解决其技术问题所采用的技术方案是:该高负荷状态强关联交叉口群链式防堵控制相位差优化方法,其特征在于:包括如下步骤:
5.s1建立基于电警数据的排队消散波模型;
6.s2建立高负荷状态下强关联交叉口群车流运行特征表达模型;
7.s3基于车辆时间累计图动态描述强关联路段驶入-驶出时空演化特征;
8.s4建立强关联交叉口群链式防堵控制相位差优化模型;
9.s5确定单向链式防堵控制相位差;
10.s6确定双向链式防堵控制相位差,并进行链式防堵控制方案设计。
11.优选的,所述的排队消散波模型为:
[0012][0013]
其中,vw为排队消散波速度,t
hct
为排队尾车通过停止线时刻,t1为排队头车通过停止线时刻,l
tcd
为一周期内通过的最后一辆排队车辆从启动到通过停止线的距离,t
tcd
为排队尾车从启动到通过停止线所需的时间。
[0014]
优选的,一周期内通过的最后一辆排队车辆从启动到通过停止线的距离l
tcd
为:
[0015][0016]
其中,l
eff
为有效车辆长度,q
que
为一个周期内目标相位排队车辆数,n为目标相位对应进口车道数;
[0017]
排队尾车从启动到通过停止线所需的时间t
tcd
为:
[0018][0019]
其中,a为排队车辆起动加速度,vf为自由流速度。
[0020]
优选的,所述方法还包括,建立高负荷状态强关联下游交叉口车辆驶出特征表达模型:
[0021][0022]
其中,为交叉口i 1一周期直行相位驶出车辆总数,s为饱和流率,为交叉口i 1上行方向渠化段外车流中直行车所占比例,t
oa
为饱和流率驶出阶段时间,t
ab
为非饱和流率驶出阶段时间;
[0023][0024]
其中,lc和lb分别为交叉口i 1进口道渠化段长度和展宽段长度,l0为车辆启动损失时间,为交叉口i 1南北直行相位绿灯时间。
[0025]
优选的,所述方法还包括,建立高负荷状态强关联上游交叉口车辆驶入特征表达模型为:
[0026][0027][0028]
其中,为重交通流向中交叉口i直行驶入能力,为左转驶入能力;为轻交通流向中交叉口i 1直行驶入能力,为左转驶入能力,为上行方向驶入总量,为驶出总量。
[0029]
优选的,所述方法还包括,建立高负荷状态下强关联交叉口群驶入-驶出特征表达模型:
[0030][0031]
0≤t≤c;
[0032]
其中,为优化前交叉口i轻交通流向二次排队车辆数最大值,和分别为交叉口i轻交通流向过饱和相位渠化段车道数和长度;和分别为轻交通流向路段车道
数和长度。
[0033]
优选的,两交叉口重交通流向链式防堵控制相位差t
i,i 1
为:
[0034][0035]
其中,t
i,f
为排队车辆首车在交叉口i出口道停车等待时间,为排队消散波vw从交叉口i 1进口道停止线传播至交叉口i进口道停止线所用时间,为交叉口i链式防堵相位绿灯启亮后车队首车行驶至该交叉口出口道所用时间。
[0036]
优选的,排队消散波vw从交叉口i 1进口道停止线传播至交叉口i进口道停止线所用时间为交叉口i链式防堵相位绿灯启亮后车队首车行驶至该交叉口出口道所用时间为分别为:
[0037][0038]
其中,为交叉口i内部空间重交通流向可容纳车辆数,为交叉口i 1车辆平均驶出速率,a1为车辆启动加速度,l
i,i 1
为交叉口i与i 1间距,为交叉口i南北停止线间隔;
[0039]
排队车辆首车在交叉口i出口道停车等待时间t
i,f
为:
[0040][0041]
其中,为南北左转相位绿灯时间,为交叉口i 1南北左转相位绿灯时间,为交叉口i的南北直行相位绿灯时间。
[0042]
优选的,交叉口i内部空间重交通流向可容纳车辆数为
[0043][0044]
交叉口i 1车辆平均驶出速率为
[0045][0046]
其中:为南北直行进口道车道数。
[0047]
优选的,所述双向链式防堵控制相位差为:
[0048]
t
i,i 1
=min{t
i,i 1
,t
i 1,i
};
[0049]
其中,t
i,i 1
为交叉口i与i 1双向防溢流控制相对相位差,t
i 1,i
为轻交通流向相对相位差。
[0050]
与现有技术相比,本发明所具有的有益效果是:
[0051]
本高负荷状态强关联交叉口群链式防堵控制相位差优化方法的综合考虑上游交叉口驶入能力、下游交叉口驶出能力以及相位差的影响,建立了以交叉口群不发生链式拥堵即路段剩余容量大于等于零为目标的高负荷状态下强关联交叉口群链式防堵控制相位差优化模型,能够适用于各种交通条件下的链式防堵控制方案设计。本高负荷状态强关联交叉口群链式防堵控制相位差优化方法对强关联交叉口群在高负荷状态下车流运行特征进行深入解析,建立了基于电警数据的排队消散波模型,发明了高负荷状态下强关联交叉口群链式防堵控制相位差优化方法,解决了强关联交叉口群在高峰期易发生双向链式拥堵的问题。
附图说明
[0052]
图1为本发明的流程图;
[0053]
图2是本发明强关联交叉口群示意图;
[0054]
图3是本发明高负荷状态下交通波示意图;
[0055]
图4是本发明直行相位驶出特征分析示意图;
[0056]
图5是本发明驶入与驶出车辆时间累计示意图;
[0057]
图6是本发明协调后系统运行状态示意图。
具体实施方式
[0058]
图1~6是本发明的最佳实施例,下面结合附图1~6对本发明做进一步说明。
[0059]
本发明中默认交叉口采用传统四相位控制方案,通过分别建立上下游交叉口车辆流运行特征的表达模型,实现交叉口i和交叉口i 1的的双向链式防堵控制。a侧为上行方向,b侧为下行方向,上行方向为重交通流向,下行方向为轻交通流向。一公共信号周期内,上行方向驶入总量为驶出总量为下行方向驶入总量为驶出总量为强关联交叉口群见图2。
[0060]
如图1所示:高负荷状态强关联交叉口群链式防堵控制相位差优化方法,包括如下步骤:
[0061]
s1建立基于电警数据的排队消散波模型;
[0062]
s2建立高负荷状态下强关联交叉口群车流运行特征表达模型;
[0063]
s3基于车辆时间累计图动态描述强关联路段驶入-驶出时空演化特征;
[0064]
s4建立强关联交叉口群链式防堵控制相位差优化模型;
[0065]
s5确定单向链式防堵控制相位差;
[0066]
s6确定双向链式防堵控制相位差,并进行链式防堵控制方案设计。
[0067]
建立基于电警数据的排队消散波模型包括如下步骤:
[0068]
s1.1基于电警数据提取交通参数。
[0069]
交通参数包括:排队尾车从启动到通过停止线所需的时间t
tcd
,一周期内通过的最后一辆排队车辆从启动到通过停止线的距离l
tcd
,l
eff
为有效车辆长度,取7m,q
que
为一个周期内目标相位排队车辆数,n为目标相位对应进口车道数,vf为自由流速度,a为排队车辆起
动加速度,取2.8m/s。
[0070]
高负荷状态下车头时距变化分为两个基本阶段,第一阶段是每车道前三辆车启动加速阶段,此时车头时距变化较大;第二阶段是排队车辆以稳定车头时距通过停车线。结合监控视频数据和记录数据进行对比分析,确定第一阶段阈值为7s,第二阶段阈值为4.5s时,其处理结果和真实排队情况较为相符。
[0071]
遍历车头时距集合{h
t,i
},若存在某车头时距h
t,i
大于车头时距阈值,则此车头时距对应的车辆i为非排队通行车辆的首车,早于车辆i驶离的车辆均为排队车辆。
[0072][0073][0074]
s1.2建立基于电警数据的排队消散波模型。
[0075]
该参数包括:排队消散波速度vw,排队尾车通过停止线时刻t
hct
,排队头车通过停止线时刻t1。高负荷状态下交通波分布见图3。该数据来源主要是经过预处理和计算后的电警数据。
[0076][0077]
建立高负荷状态下强关联交叉口群车流运行特征表达模型,需要分别建立高负荷状态下强关联交叉口群下游交叉口车辆驶出特征、上游交叉口车辆驶入特征及驶入-驶出特征表达模型。
[0078]
s2.1建立高负荷状态强关联下游交叉口车辆驶出特征表达模型。
[0079]
这里参数包括:饱和流率s,交叉口i 1一周期直行相位驶出车辆总数饱和流率驶出阶段时间t
oa
,非饱和流率驶出阶段时间t
ab
,交叉口i 1进口道渠化段长度和展宽段长度lc和lb,车辆启动损失时间l0,交叉口i 1南北直行相位绿灯时间该数据来源主要是通过实地调查,包括交叉口i 1上行方向渠化段外车流中直行车所占比例以交叉口i 1直行相位为例进行驶出特征分析见图4。
[0080]
两阶段持续时间分别为:
[0081][0082]
驶出车辆总数为:
[0083]
[0084]
s2.2建立高负荷状态强关联上游交叉口车辆驶入特征表达模型。
[0085]
计算参数包括:一公共信号周期中,重交通流向中交叉口i直行驶入能力为左转驶入能力为轻交通流向中交叉口i 1直行驶入能力为左转驶入能力为左转驶入能力为
[0086]
为保证强关联交叉口群不发生链式拥堵,需满足在强关联路段上游交叉口驶入车辆数不大于下游交叉口驶出车辆数,即:
[0087][0088]
基于车辆时间累计图动态描述强关联路段驶入-驶出时空演化特征,需要建立高负荷状态下强关联交叉口群驶入-驶出特征表达模型,高负荷状态下强关联交叉口群驶入-驶出特征表达模型建立过程包括如下步骤:
[0089]
先结合强关联路段驶入与驶出车辆数差异建立车辆时间累计图。
[0090]
由于交叉口各相位对应进口道和出口道的车道数、绿灯时间等影响因素不同,所对应的驶入和驶出能力也存在较大差异,具体可分为以下两大类六种情况,驶入与驶出车辆时间累计图5。
[0091]
若发生链式拥堵,即路段驶入车辆数大于驶出车辆数;
[0092][0093]
若不发生链式拥堵,路段存在部分闲置,即路段驶入车辆数小于驶出车辆数;
[0094][0095]
其次结合车辆时间累计图建立优化目标。
[0096]
通过对协调后系统运行状态进行分析,以单向链式防堵控制为例,可以使得强关联路段车流运行情况和驶入与驶出能力变化进行协同分析,协调后系统运行状态见图6。
[0097]
交叉口i与i 1间重交通流向路段剩余容量为即驶入总量与驶出总量的差值。
[0098][0099]
当路段剩余容量大于零时,无链式拥堵发生;当路段剩余容量小于零时,发生链式
拥堵。
[0100][0101]
最后建立约束条件。
[0102]
数据来源主要是通过实地调查,包括优化前交叉口i轻交通流向二次排队车辆数最大值交叉口i轻交通流向过饱和相位渠化段车道数和长度和轻交通流向路段车道数和长度和
[0103]
确定双向链式防堵控制相位差包括如下步骤:
[0104]
确定单向链式防堵控制相位差;
[0105]
数据来源主要是通过实地调查,包括交叉口i与i 1间距为l
i,i 1
,交叉口i南北停止线间隔交叉口i的南北直行相位绿灯时间南北直行进口道车道数南北左转相位绿灯时间交叉口i 1南北左转相位绿灯时间交叉口i内部空间重交通流向可容纳车辆数为交叉口i 1车辆平均驶出速率为
[0106][0107][0108]
排队消散波vw从交叉口i 1进口道停止线传播至交叉口i进口道停止线所用时间为交叉口i链式防堵相位绿灯启亮后车队首车行驶至该交叉口出口道所用时间为a1为车辆启动加速度,取6m/s2。和分别为:
[0109][0110]
为满足链式防堵控制需求,上游交叉口驶入车队需满足一定的时间限制,需要使上游驶入车队在进口道停车等待,排队车辆首车在交叉口i出口道停车等待时间为t
i,f
为:
[0111][0112]
最终可以得到两交叉口重交通流向链式防堵控制相位差t
i,i 1
为:
[0113][0114]
最后确定双向链式防堵控制相位差;
[0115]
这里计算参数包括:轻交通流向相对相位差为t
i 1,i
,交叉口i与i 1双向防溢流控
制相对相位差为t
i,i 1
。
[0116]
t
i,i 1
=min{t
i,i 1
,t
i 1,i
}。
[0117]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例。但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。