1.本发明涉及建筑施工标线装置领域,更具体的,涉及一种方便使用的定位标线设备。
背景技术:
2.弹线是一种建筑作业方法,具体操作方法是:用一条沾了墨的线,两个人每人拿一端然后弹在地上或者墙上。作用是用来确定水平线或者垂直线,又或者作为砌墙的参考线。其中,弹地线指的是在建筑分户验收过程中,用于标注房间净高、开间进深的工具线,弹地线一般用于住宅建筑施工。
3.弹线作为建筑施工中的一项基本的环节,施工中对它的准确性要求是十分的高,因为它将决定下一道工序的成败。值得注意的是,目前弹地线的具体操作方法是:通过盒尺量出距离后,在地上做出标记,接着由工人墨斗进行弹线;然而,现有的弹线作业大部分工作都是目测完侧,偏差较大;再者,采用盒尺量距离不仅精确度不足,尚且费工费时;并且,长距离的弹线,需两个人才可进行操作,一人难以操作,使用不便,有待改进。
技术实现要素:
4.为了克服现有技术的缺陷,本发明所要解决的技术问题在于提出一种方便使用的定位标线设备,其结构新颖,具有自动找平功能,可自行升降至预设高度,实现自动定位效果,可有效提高测量距离的准确度;并且,可在定位后进行墨线的释放及收卷,实现单人施工操作,便于使用。
5.为达此目的,本发明采用以下技术方案:本发明提供了一种方便使用的定位标线设备,包括第一标高拉线装置、第二标高拉线装置,第一标高拉线装置及第二标高拉线装置均可自动调节至所需高度,且可于目标高度位置之间牵拉墨线;第一标高拉线装置包括底座、爬杆、墨线盒、顶推结构;顶推结构安装在底座的侧壁,用于调整底座与墙面之间的间距;底座上安装有至少两个调节支撑脚,对应调节支撑脚安装有平衡传感器,用于自动找平;爬杆固定安装在底座的顶面,爬杆上安装有攀爬结构,攀爬结构沿爬杆进行竖向移动,墨线盒安装在攀爬结构上、随着升降移动至目标高度;第二标高拉线装置与第一标高拉线装置为镜像对称结构。
6.在本发明较佳的技术方案中,底座的底部安装有滚轮结构,滚轮结构沿墨线的牵拉方向进行移动;调节支撑脚的底端可向下移动至低于滚轮结构的轮体的底端。
7.在本发明较佳的技术方案中,底座包括箱体及箱盖,箱体的底面开设有两个敞开口,滚轮结构包括第一电机,链轮链条组件、及两组成对设置的轮体,一对轮体通过支撑轴架设于箱体的两相对侧壁,轮体经敞开口突出箱体的底部,第一电机与其中一对轮体的支撑轴通过链轮链条组件传动连接。
8.在本发明较佳的技术方案中,调节支撑脚包括第二电机、丝杠、支撑座、插杆;箱体的底部设有穿孔,箱体的底部内壁对应穿孔固定设有管体,管体及穿孔的内壁设有螺纹,丝
杠与管体螺纹配合、且通过穿孔贯穿箱体的底面,支撑座转动安装在丝杠的底端;丝杠的顶面向内凹陷设有插孔,插孔为棱形孔结构,插杆的形状与插孔的形状一致,插杆伸入插孔内,插杆的顶端贯穿箱盖、且端部与第二电机的输出轴通过联轴器传动连接,第二电机通过第二支架安装在箱盖的顶面。
9.在本发明较佳的技术方案中,顶推结构包括电动推杆、推板,电动推杆固定安装在箱体的内部,电动推杆的活塞杆贯穿箱体的侧壁,推板固定在电动推杆的活塞杆的端部,电动推杆用以带动推板进行移动、从而调整底座与墙面之间的间距。
10.在本发明较佳的技术方案中,攀爬结构包括套筒、第三电机、测距传感器;爬杆为方形杆结构,套筒的内壁与爬杆的形状适配,套筒滑动套设于爬杆上;爬杆的一侧固定设有齿条,齿条沿爬杆的长度方向延伸;套筒上固定设有托板,第三电机安装在托板上,第三电机的输出轴固定设有齿轮,齿轮与齿条啮合;测距传感器安装在托板的底面,测距传感器的探头朝下设置;墨线盒固定在托板上。
11.在本发明较佳的技术方案中,墨线盒包括盒体、绕卷轮、墨线、第一导线轮、第二导线轮、卷管器;绕卷轮转动架设于盒体的内部,卷管器安装在盒体的外部,绕卷轮的转轴贯穿至盒体的外部、且与卷管器的连接部固定连接,墨线的一端固定在绕卷轮上,另一端固定设有勾爪;第一导线轮及第二导线轮通过支撑轴转动架设于盒体的顶部开口处,第一导线轮及第二导线轮上均设有环形状的线槽,第一导线轮的直径大于第二导线轮的直径;盒体的外壁固定设有第一勾座及第二勾座,勾爪可勾挂在第一勾座及第二勾座上;第一勾座与第一导线轮位置对应,第一勾座位于第一导线轮靠近齿条的一侧、且高度低于第一导线轮所处高度;第二勾座与第二导线轮位置对应,第二勾座位于第二导向轮远离齿条的一侧、且高度低于第二导线轮所处高度。
12.本发明的有益效果为:本发明提供了一种方便使用的定位标线设备,其结构新颖,包括第一标高拉线装置、第二标高拉线装置,两者为镜像对称结构,均可自动调节至所需高度;第一标高拉线装置包括底座、爬杆、墨线盒、顶推结构;顶推结构安装在底座的侧壁,用于调整底座与墙面之间的间距,使得两底座之间进行基础的对准;底座上安装有至少两个调节支撑脚,对应调节支撑脚安装有平衡传感器,用于自动找平,以便两底座处于基础的齐高状态,方便后续的拉线定高;爬杆上安装有攀爬结构,攀爬结构沿爬杆进行竖向移动,墨线盒安装在攀爬结构上、随着升降移动至目标高度,实现自动定高,无需人为手动测量,保证定位的准确性;整体结构的设计与配合,具有自动找平功能,可自行升降至预设高度,实现自动定位效果,可有效提高测量距离的准确度;并且,可在定位后再进行墨线的释放及收卷,实现单人施工操作,便于使用。
附图说明
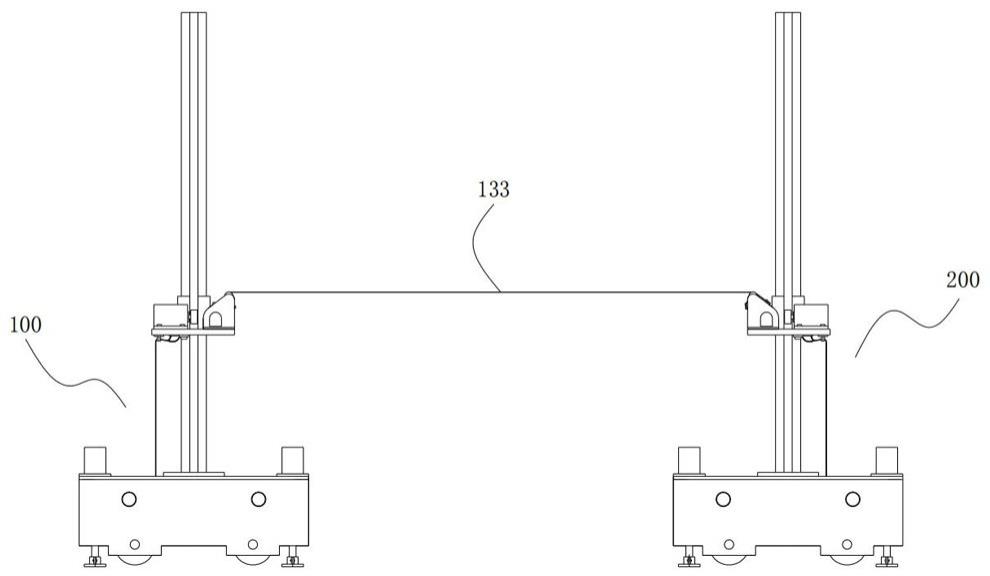
13.图1是本发明的具体实施例中提供的一种方便使用的定位标线设备的结构示意图;图2是本发明的具体实施例中提供的第一标高拉线装置的正视图;图3是本发明的具体实施例中提供的第一标高拉线装置的后视图;
图4是本发明的具体实施例中提供的底座的内部结构示意图;图5是本发明的具体实施例中提供的两个墨线盒之间的配合状态示意图。
14.图中:100、第一标高拉线装置;110、底座;111、箱体;112、箱盖;113、管体;120、爬杆;121、齿条;122、导向条;130、墨线盒;131、盒体;132、绕卷轮;133、墨线;134、第一导线轮;135、第二导线轮;136、卷管器;137、第一勾座;138、第二勾座;139、勾爪;141、电动推杆;142、推板;150、调节支撑脚;151、第二电机;152、丝杠;153、支撑座;154、插杆;155、插孔;160、平衡感应器;170、攀爬结构;171、套筒;172、第三电机;173、测距传感器;174、托板;175、齿轮;180、滚轮结构;190、自动绕线盘;200、第二标高拉线装置。
具体实施方式
15.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
16.如图1至图4所示,本发明的具体实施例中公开了一种方便使用的定位标线设备,包括第一标高拉线装置100、第二标高拉线装置200,第一标高拉线装置及第二标高拉线装置均可自动调节至所需高度,且可于目标高度位置之间牵拉墨线;第一标高拉线装置100包括底座110、爬杆120、墨线盒130、顶推结构;顶推结构安装在底座110的侧壁,用于调整底座与墙面之间的间距;底座110上安装有至少两个调节支撑脚150,对应调节支撑脚150安装有平衡传感器160,用于自动找平;爬杆120固定安装在底座110的顶面,爬杆120上安装有攀爬结构170,攀爬结构170沿爬杆120进行竖向移动,墨线盒130安装在攀爬结构170上、随着升降移动至目标高度;第二标高拉线装置与第一标高拉线装置为镜像对称结构。
17.上述的一种方便使用的定位标线设备,其结构新颖,包括第一标高拉线装置、第二标高拉线装置,两者为镜像对称结构,均可自动调节至所需高度;第一标高拉线装置包括底座、爬杆、墨线盒、顶推结构;顶推结构安装在底座的侧壁,用于调整底座与墙面之间的间距,使得两底座之间进行基础的对准;底座上安装有至少两个调节支撑脚,对应调节支撑脚安装有平衡传感器,用于自动找平,以便两底座处于基础的齐高状态,方便后续的拉线定高;爬杆上安装有攀爬结构,攀爬结构沿爬杆进行竖向移动,墨线盒安装在攀爬结构上、随着升降移动至目标高度,实现自动定高,无需人为手动测量,保证定位的准确性;整体结构的设计与配合,具有自动找平功能,可自行升降至预设高度,实现自动定位效果,可有效提高测量距离的准确度;并且,可在定位后再进行墨线的释放及收卷,实现单人施工操作,便于使用。
18.进一步地,调节支撑脚的数量优选为4个,四个调节支撑脚分布于底座的底面四角位置,通过多点支撑,进而更好的适配不平整的地面;平衡传感器的数量与调节支撑脚的数量对应、且分别靠近四个调节支撑脚设置,当四个平衡传感器均处于预设的平衡范围内时,才符合调平的状态。
19.进一步地,底座110的底部安装有滚轮结构180,滚轮结构沿墨线的牵拉方向进行移动;调节支撑脚的底端可向下移动至低于滚轮结构的轮体的底端,滚轮结构的设计,可方便整个设备的移动,并且可通过遥控的方式进行移动;尤其是在相对平整的作业环境中,可通过遥控第一标高拉线装置、第二标高拉线装置相向运动,以便后续墨线的收回,减少占用其他的作业时间,提高工作效率。
20.进一步地,底座110包括箱体111及箱盖112,箱体的底面开设有两个敞开口,滚轮结构180包括第一电机,链轮链条组件、及两组成对设置的轮体,一对轮体通过支撑轴架设于箱体的两相对侧壁,轮体经敞开口突出箱体的底部,第一电机与其中一对轮体的支撑轴通过链轮链条组件传动连接;第一电机通过第一支架固定安装在箱体的内部,第一电机的输出轴固定设有第一链轮,临近的支撑轴上固定设有第二链轮,第一链轮与第二链轮之间通过链条传动连接;箱体的外壁安装有电控箱,电控箱与各电器件进行电连接,通过电控箱进行参数输入,以及各动作的调控,实现自动运作的效果;需要说明的是,电控箱是常见的电控器件,在市面上可采购使用,具体结构不做赘述。
21.进一步地,电控箱内集成安装有无线传输模块,第一标高拉线装置、第二标高拉线装置之间进行无线信号传输,当两底座各自调平后,再以伸出最长的调节支撑脚作为基准,另一个底座相应调节至等同的高度,实现两个底座之间的齐高调整;也可通过遥控的方式控制滚轮结构的启停。
22.进一步地,调节支撑脚150包括第二电机151、丝杠152、支撑座153、插杆154;箱体的底部设有穿孔,箱体111的底部内壁对应穿孔固定设有管体113,管体及穿孔的内壁设有螺纹,丝杠152与管体113螺纹配合、且通过穿孔贯穿箱体的底面,支撑座153转动安装在丝杠152的底端;丝杠152的顶面向内凹陷设有插孔155,插孔为棱形孔结构,插杆154的形状与插孔155的形状一致,插杆伸入插孔内,插杆154的顶端贯穿箱盖112、且端部与第二电机151的输出轴通过联轴器传动连接,第二电机通过第二支架安装在箱盖的顶面;由于插孔为棱形孔结构,插杆伸入插孔内,插杆转动时可带动丝杠进行转动,实现伸缩调节效果,由于插杆与插孔处于滑动配合状态,不影响丝杠的正常移动。
23.进一步地,第二电机的外侧罩设有防护罩,防护罩通过螺钉固定在箱盖的顶面,对第二电机起到遮挡防尘、防水的效果。
24.进一步地,支撑座包括两个相对设置的对接组件,对接组件包括支撑板、半环板,支撑板呈半圆板结构,半环板的轴线与支撑板的圆心重合,半环板固定在支撑板的顶面;半环板的内径与丝杠的底端直径适配,半环板的内壁固定设有卡块,丝杠的底部侧壁开设有卡槽,卡块的形状与卡槽形状适配;半环板的两侧外壁固定设有对接板,两对接组件之间通过贯穿对接板的螺栓固定连接,丝杠的底端转动卡于两对接组件之间,既不影响丝杆的正常转动,也可带动支撑座进行升降活动,可在支撑座抵持接触地面时、减轻丝杠转动的阻力。
25.进一步地,顶推结构包括电动推杆141、推板142,电动推杆固定安装在箱体的内部,电动推杆的活塞杆贯穿箱体的侧壁,推板固定在电动推杆的活塞杆的端部,电动推杆用以带动推板进行移动、从而调整底座与墙面之间的间距。
26.进一步地,顶推结构的数量优选为2,两个顶推结构关于底座的中心对称设置,可扩大支撑的范围,防止底座出现单侧偏移、不平衡的问题,提高对位的准确性。
27.进一步地,攀爬结构170包括套筒171、第三电机172、测距传感器173;爬杆120为方形杆结构,套筒171的内壁与爬杆120的形状适配,套筒滑动套设于爬杆上;爬杆120的一侧固定设有齿条121,齿条沿爬杆的长度方向延伸;套筒171上固定设有托板174,第三电机172安装在托板174上,第三电机172的输出轴固定设有齿轮175,齿轮与齿条啮合;测距传感器
173安装在托板174的底面,测距传感器的探头朝下设置;墨线盒130固定在托板174上;第三电机带动齿轮旋转,在于齿条的啮合作用下,实现套筒的升降活动,从而带动墨线盒进行升降;第三电机采用步进电机或伺服电机,在断电时实现自锁效果,确保套筒处于所需的高度位置。
28.进一步地,箱体111的内部安装有自动绕线盘190,自动绕线盘的输入端与电控箱电连接,自动绕线盘的输出端的导线的端部固定在托板的底面,支线分别与第三电机、测距传感器进行连接,既不影响攀爬结构的升降,也可防止导线散乱。
29.进一步地,爬杆120远离齿条的一侧固定设有导向条122,套筒的内壁对应导向条开设有导向槽,套筒经导向槽沿导向条滑动,进一步限定套筒的移动,防止松脱或偏移。
30.进一步地,如图5所示,墨线盒130包括盒体131、绕卷轮132、墨线133、第一导线轮134、第二导线轮135、卷管器136;绕卷轮132转动架设于盒体131的内部,卷管器136安装在盒体131的外部,绕卷轮132的转轴贯穿至盒体的外部、且与卷管器136的连接部固定连接,墨线133的一端固定在绕卷轮132上,另一端固定设有勾爪139;第一导线轮134及第二导线轮135通过支撑轴转动架设于盒体131的顶部开口处,第一导线轮134及第二导线轮135上均设有环形状的线槽,第一导线轮的直径大于第二导线轮的直径;盒体131的外壁固定设有第一勾座137及第二勾座138,勾爪可勾挂在第一勾座及第二勾座上;第一勾座137与第一导线轮134位置对应,第一勾座位于第一导线轮靠近齿条的一侧、且高度低于第一导线轮所处高度;第二勾座138与第二导线轮135位置对应,第二勾座位于第二导向轮远离齿条的一侧、且高度低于第二导线轮所处高度;卷管器主要包括插管、发条弹簧,插管提供插入连接部位,通过发条弹簧作为复位的牵拉动力部件,当外部解除对墨线的拉力时,发条弹簧复位,带动绕卷轮对墨线进行绕卷收回;需要说明的是,卷管器是常见的绕卷结构,在市面上可采购使用,具体结构不做赘述;更具体的,在使用时,在未拉线前,墨线绕过第二导线轮,勾爪是扣于第二勾座上的,不影响套筒的正常升降,也防止墨线松散及勾爪位置不定,方便后续的取放使用;当需要进行拉线时,仅需拉动有一个墨线盒的墨线即可,另一个不做操作;勾爪从第二勾座上取下,使墨线绕过第一导线轮,接着牵拉墨线往另一个墨线盒方向移动,使得此墨线绕过另一个第一导线轮、并扣在第一勾座上,从而完成墨线的牵拉;再接触拉线时,从第一勾座上取下勾爪,卷管器带动绕卷轮转动,使得墨线往回收卷,施工人员再将墨线绕过第二导线轮,勾爪扣在第二勾座上即可。
31.本发明是通过优选实施例进行描述的,本领域技术人员知悉,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。本发明不受此处所公开的具体实施例的限制,其他落入本技术的权利要求内的实施例都属于本发明保护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。