pos高精度避遮定位方法
技术领域
1.本发明涉及定位技术领域,具体涉及一种硬件实现的pos高精度避遮定位方法。
背景技术:
2.申请号202211106731.5的一种用于工程机械的多传感器融合定位定姿测速方法。提出了一种融合多传感器的定位定姿测速方法,能对工程机械进行导航和定位。
3.申请号202211024566.9的一种gnss多天线与ins紧组合定位定姿方法和设备。通过多天线gnss观测值与ins构成紧组合系统,可获取高精度的位置姿态信息。
4.申请号202010797351.5的一种采煤机定位定姿装置及方法。测量设备的姿态和里程计,构造采煤机姿态矩阵,计算采煤机出的经度、纬度和高度。
5.申请号201911099403.5的一种便携式惯性导航定位杆及其定位定姿方法。解决了低成本微机电(mems)惯性导航系统(ins)的导航误差随时间快速累积导致的精度发散问题,实现便携式导航定位或测图设备的准确定位。
6.申请号202111589804.6的一种基于全景视频的室内定位定姿方法及装置。将所述全景影像按照设定规则进行划分得到柱面鱼眼影像;将所述柱面鱼眼影像转换为球面鱼眼影像,根据所述球面鱼眼影像进行定位定姿。
7.申请号201810792893.6的一种定位定姿方法及装置。通过激光辅助配合惯性导航技术减缓系统误差的发散速度,实现持续激光扫描辅助惯导持续定位。
8.以上pos(position and orientation system)系统均没有防遮蔽功能且算法使用传统的方法实现,pos系统在测量搭载设备的位置姿态信息时,若搭载设备行驶到卫星信号弱的地区,如高大建筑时,无法接收到卫星信号,进而导致操控人员无法得知搭载设备的精确位置,影响探测任务。为解决搭载设备在遮挡情况下的位置信息丢失问题,本发明提出了一种pos高精度避遮定位方法,可对卫星信号丢失点处的定位数据进行预测,预测出丢失的位置信息。
技术实现要素:
9.针对上述问题,本发明公开了一种pos高精度避遮定位方法,可实现对搭载设备在遮挡环境下高精度位置信息的获取。
10.本发明的设计方案如下:
11.pos高精度避遮定位方法在系统中用硬件逻辑器件实现,系统主要由中央控制单元,gnss定位单元,imu姿态测量单元,物联网单元,存储单元组成。该方法是一种可以对搭载设备在遮挡环境下高精度位置姿态信息的获取且可以连续长时间运行的定位定姿设备。
12.具体的避遮挡处理有如下几个步骤:
13.1.从接收到的sv报文中,计算出数据采样的延时时间,结合sv报文头部的接收时刻,得到精确的采样时刻tsample;
14.2.在fpga中布置ram缓冲区,缓存采样到的gnss定位数据,和采样时刻tsample;
15.3.如果系统检测到定位信息丢失,从所述缓冲区中搜寻出前五个点,用寄存器暂存;
16.4.等再次检测到定位信息,用寄存器存储开始的前五个位置信息,并使用滤波算法对寄存器中的10个点进行滤波剔除噪声;
17.5.使用避遮算法对滤波后的数据进行计算,计算出信号丢失出的拟合曲线方程,带入未知点处的采样时刻tsample,计算出遮避处的位置信息。
18.在所述的一种pos高精度避遮定位方法中,所述采样延时信息包括:采样延时最大值tdelay,采样报文接收时刻tarr,采样时刻tsample表示为:tsample=tarr-tdelay。
19.在所述的一种pos高精度避遮定位方法中,其特征在于,所述避遮挡算法可以对位置信息丢失的时刻tshield进行预测,具备避遮挡功能。
20.在所述的一种pos高精度避遮定位方法中,所述避遮定位方法,表示为:
[0021][0022]
在所述的一种pos高精度避遮定位方法中,所述缓冲区缓存5个最新的位置信息和采样时间。
[0023]
在所述的一种pos高精度避遮定位方法中,所述滤波模块可对寄存器中的10个点进行滤波剔除噪声,滤波模块由接收数据寄存器,rom模块,相关运算模块组成。
[0024]
在所述的一种pos高精度避遮定位方法中,其特征在于,所述中央控制系统附带有若干个uart通信接口,能和所述gps定位控制系统,姿态测量,物联网控制系统,存储系统等进行通信。
[0025]
在所述的一种pos高精度避遮定位方法中,其特征在于,所述gnss定位单元中,gnss模块为全系统八频高精度定位定向模块,支持bds b1/b2 gps l1/l2 glonass l1/l2 galileo e1/e5b卫星信号
[0026]
在所述的一种pos高精度避遮定位方法中,其特征在于,所述gnss模块支持单系统独立定位和多系统联合定位,可实现四系统所有可视卫星参与rtk解算和heading解算。
[0027]
在所述的一种pos高精度避遮定位方法中,其特征在于,所述物联网控制系统支持移动4g/3g/2g、联通4g/3g/2g、电信4g/3g/2g接入,支持tcp连接,动态域名和ip地址访问。
[0028]
在所述的一种pos高精度避遮定位方法中,其特征在于,所述存储单元支持sd卡存储,能对数据进行存储。
[0029]
本发明和现有pos系统相比,其显著特征在于:(1)融合差分改正数据对单点定位数据进行改正,获得高精度的定位数据,定位的精度可达1cm,;(2)使用硬件实现,使用硬件逻辑器件对算法进行实现,算法运行效率高,且能在卫星信号丢失的情况下,对丢失的位置点进行预测,提高了系统在恶劣环境下的工作性能。
附图说明
[0030]
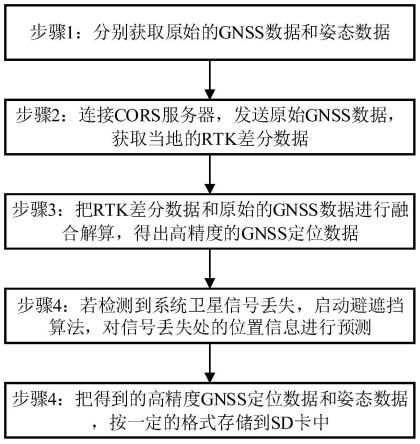
图1是本发明的步骤图
[0031]
图2是本发明的实际电路连接展示图
[0032]
图3是本发明pos高精度避遮定位方法工作步骤。
具体实施方案
[0033]
为使本发明的目的、技术方案及优点更加清楚明白,以下描述出pos高精度避遮定位方法的具体实施细节,结合附图对本发明具体设计原理作进一步详细说明。
[0034]
pos高精度避遮定位方法在系统中用硬件逻辑器件实现,系统主要由中央控制单元,gnss定位控制单元,fpga单元,物联网控制单元,存储单元组成。该方法是一种可以对搭载设备在遮挡环境下高精度位置姿态信息的获取且可以连续长时间运行的定位定姿设备。
[0035]
中央控制单元。中央控制单元负责控制整个系统的工作流程,各个模块的启动,指令的发送以及数据的传输,加密。pos高精度避遮定位方法以stm32单片机为主处理核心,以串口通信为主要数据传输方式,以sd卡作为存储媒介,完成对搭载设备的gnss位置信息,加速度,角速度等姿态信息的获取和存储以及加密,主要的控制流程如下:
[0036]
步骤1,获取原始的单点定位数据和姿态数据,通过gnss模块获取单点定位数据,通过imu模块获取姿态数据;
[0037]
步骤2,获取差分改正数据,使用物联网模块连接上cors服务器,往cors服务器发送单点定位数据,cors服务器返回附近最近基站的差分改正数据;
[0038]
步骤3,进行差分解算,把单点定位数据和差分改正数据进行融合解算,得到实时的高精度位置姿态信息;
[0039]
步骤4,一旦检测到位置信号丢失,通过滤波避遮算法,预测出丢失处的位置信息。
[0040]
步骤5,对采集到的位置姿态信息进行存储和串口输出。
[0041]
选择主控芯片为stm32,在整个系统中主要采用uart通信方式和各个模块之间进行通信。使用了该芯片的4个uart通信接口,分别为com1,com2,com3,com5,使整个系统集成在一起。
[0042]
gnss定位单元。gnss定位控制单元主要负责gnss模块控制指令的发送和数据流的传输,该gnss定位模块支持全系统多频点rtk定位,可同时跟踪bds b1/b2(b3) gps l1/l2 glonass l1/l2 galileo e1/e5b qszz等多频点。
[0043]
imu姿态测量单元。imu姿态测量单元可实现对搭载设备实时姿态的测量(包括三轴陀螺仪、三轴加速度计和三轴磁传感器),该imu模块可以实现0.1
°
的动态横滚角和俯仰精度、0.15
°
的无参考航向角精度和0.3
°
的磁参考航向角精度,满足较高精度的姿态。姿态数据帧结构包含五部分:帧头、时间戳、数据长度、数据、校验码。这里采取中断的方式进行数据帧的校验以及解析。
[0044]
物联网单元。物联网模块连接中央主控板卡的com2,该模块支持移动4g/3g/2g、联通4g/3g/2g、电信4g/3g/2g接入,支持tcp连接,动态域名和ip地址访问,支持多种工作模式:net/http/mqtt/rndis,这样可以很方便的更换各个运营商的sim卡。
[0045]
要通过物联网获取rtk数据,首先是要先连接cors基站,常用的cors基站要么是使用自己架设的移动站,要么是使用cors系统。cors系统是测绘信息化的一种基础建设设施,通过rtk(real-time kinematic)实时动态载波相位差分技术。其原理是,把基准站上测量到的卫星数据,发送到移动的gnss接收机中,接收到差分信号的gnss定位设备,对其进行实时处理,得出定位的位置信息。与cors基站的连接首先要通过tcp/ip协议连接到互联网,访
问网站的ip地址,发送账号密码,与cors基站建立连接。发送移动设备的gnss原始数据给cors基站,cors基站会把最近位置的rtk差分数据发送给客户端。
[0046]
存储单元,本发明使用fatfs文件管理系统作为内存管理系统,sd作为存储介质。移植fatfs文件管理系统到中央控制单元中,通过调用fatfs文件系统提供给用户的一系列应用接口函数,如f_open,f_read,f_write和f_close等,实现便捷的读/写文件。
[0047]
避遮挡处理,如果接收不到gnss卫星信号,选择信号丢失前的5个位置信息和信号再次出现后5个位置信息,对信号丢失前后的位置信息进行滤波预处理,去除信号丢失前的噪声,再融合避遮算法对丢失点处的数据进行计算,预测出丢失的位置信息。
[0048]
具体的避遮挡处理有如下几个步骤:
[0049]
1.从接收到的sv报文中,计算出数据采样的延时时间tdelay,结合sv报文头部的接收时刻tarr,通过公式tsample=tarr-tdelay得到精确的采样时刻tsample;
[0050]
更进一步说明的是,sv每间隔200us采样一次。
[0051]
2.在fpga中布置ram缓冲区,缓存采样到的gnss定位数据,和采样时刻tarr;
[0052]
3.如果系统检测到定位信息丢失,从所述缓冲区中搜寻出前五个点,计算出用寄存器暂存;
[0053]
4.等再次检测到定位信息,用寄存器存储开始的前五个位置信息,并使用滤波模块对寄存器中的10个点进行滤波剔除噪声,滤波模块由接收数据寄存器,rom模块,相关运算模块组成,接下来详细介绍各个模块,以及他们之间的配合。
[0054]
(1)构建一个接收数据寄存器1,长度为l1=5,用来存储最新采样的5个数据;构建一个接收数据寄存器2,长度为l2=5,用来存储信号刚出现时最新的5个采样数据。
[0055]
(2)构建一个rom模块,用来存放运算时用到的矩阵,深度为m=5,宽度为5*2;
[0056]
(3)使用乘法器加法器和矩阵运算模块计算出系统真实值与预测值之间的协方差其中,a是系统状态转移矩阵,q为过程噪声方差矩阵。
[0057][0058]
(4)同上计算出系统真实值与最优估计值之间的协方差pk,其中h是状态观测矩阵。
[0059][0060]
(5)同上计算出系统的滤波增益k,h是状态观测矩阵
[0061][0062]
(6)同上从而得到系统先验状态估计值后验状态估计值其中b是控制输入矩阵,
[0063][0064][0065]
(7)通过系统的状态描述方程,得到滤波后的数据,其中ω
k-1
是过程噪声,vk是测量噪声。
[0066]
xk=a*x
k-1
b*uk ω
k-1
ꢀꢀꢀ
(6)
[0067]
zk=h*xk vkꢀꢀꢀ
(7)
[0068]
5.使用避遮算法对滤波后的数据进行计算,取信号丢失前的两个数据p(-1)、p(0),和信号丢失后的两个数据p(1)、p(2),存放到设置好的寄存器中,使用矩阵运算模块,计算出信号丢失出的拟合曲线方程的未知参数,带入未知点处的采样时刻tshield,计算出遮避处的位置信息。更进一步的,避遮挡算法表示为:
[0069][0070]
其中,其中p(-1)和p(2)是控制点,满足如下方程,α是0到1之间的参数,表示曲线尾部和控制点之间的平行程度。
[0071]
p(0)=p0[0072]
p(1)=p1[0073]
p
′
(0)=α(p
1-p-1
)
[0074]
p
′
(1)=α(p
2-p0)
ꢀꢀꢀ
(9)
[0075]
选用滤波后的遮蔽处前后的4个位置信息数据,来构造遮蔽处p(0)到p(1)之间的曲线。构造遮蔽处的曲线方程p(t),其中p(-1)和p(2)是控制点,满足如下方程,α是0到1之间的参数,表示曲线尾部和控制点之间的平行程度,调节并选取合适的值,使得系统的误差最小。
[0076]
以上实施方式仅用于说明本发明,而并非对本发明的限制,有关技术领域的普通技术人员,在不脱离本发明的精神和范围的情况下,还可以做出各种变化和变形。因此,所有等同的技术方案也属于本发明的范畴,本发明的专利保护范围应由权利要求限定。
[0077]
本发明未详尽描述的技术内容均为公知技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
