1.本发明涉及槽道式无人艇技术领域,尤其是一种槽道式无人艇声呐布置装置及安装方法。
背景技术:
2.槽道式无人艇具有高航速、大载荷、超浅吃水的优点,广泛应用于无人艇领域。槽道式无人艇需要配置感知环境的前视声呐,为无人艇提供图像以及测深数据,用于河岸、礁石、渔网、栅栏等障碍物的探测、识别和碰撞预警作用。
3.现有技术中,前视声呐系统主要应用于钢质船体上,钢质船体的首部通常设计成水滴形状,通过焊接嵌入的方式将声呐布置于船体中,钢质船体搭载的声呐具有波束角较大、射频较高、体积和功率较大的特点。在船体航行过程中,无需调整声呐角度,软件根据船舶运动周期自行修正数据,可以使声呐在船体不同运动姿态下获得的数据有效。
4.槽道式无人艇艇体的中间设计有槽道结构,艇体采用碳纤维材质,前视声呐的布置装置通常为不锈钢材质,安装时存在异性材质连接的问题,且碳纤维船体与钢质声呐布置装置之间需要保证水密。同时,在无人艇航行过程中,若声呐裸露于水中,会增加无人艇的航行阻力;声呐探测环境时,水面混响与无人艇随波浪起伏运动,会使声呐的扫描结果存在误差。
技术实现要素:
5.本技术人针对上述现有生产技术中的缺点,提供一种槽道式无人艇声呐布置装置及安装方法,从而解决槽道式无人艇前视声呐的布置问题,通过设置摆臂,使声呐在无人艇高速航行时收入声呐槽中,低速航行时声呐从槽中放下正常工作,可以减小无人艇在高速航行时的阻力,同时减轻水面混响和波浪对声呐探测结果的影响;通过在艇体内预埋安装法兰,可以将金属材质的声呐布置装置安装于碳纤维材质的艇体上,且保证水密。
6.本发明所采用的技术方案如下:
7.一种槽道式无人艇声呐布置装置,包括艇体,艇体的外侧设置有声呐收放槽,艇体搭载声呐,还包括安装法兰,所述安装法兰的端面固定齿轮传动系统,所述齿轮传动系统的输入端设置有驱动系统,齿轮传动系统的输出端伸出安装法兰后安装摆臂,所述摆臂呈中空的圆柱形,摆臂的底面固定呈盒形的声呐安装底座,驱动系统驱动声呐安装底座从声呐收放槽中伸出与回收;
8.所述齿轮传动系统的结构为:包括与驱动系统的输出端连接的主动轮,所述主动轮配合安装有从动轮,所述从动轮连接主轴,主轴的另一端连接摆臂,主轴的外侧面设置有滚动轴承组,所述滚动轴承组的前端设置有动密封件,滚动轴承组的外部设置有端盖,主动轮与从动轮的外部设置有齿轮箱;
9.所述声呐安装底座的结构为:包括呈方形的座板,所述座板的中部开有数个腰圆孔,座板的四角安装有固定螺柱,相邻两个固定螺柱的底部固定有限位垫片,固定螺柱的外
部套有连杆,声呐通过腰圆孔与座板固定。
10.作为上述技术方案的进一步改进:
11.所述端盖与主轴连接的端面设置有第一密封圈,端盖与船体连接的端面设置有第二密封圈,齿轮箱的内部设置有第三密封圈。
12.所述驱动系统的结构为:包括伺服电机,所述伺服电机的输出端设置有减速器,所述减速器与齿轮传动系统的输入端连接,伺服电机电连接编码器,所述编码器与主轴的轴端固定。
13.所述滚动轴承组的结构为:包括第一滚动轴承和第二滚动轴承,所述第一滚动轴承和所述第二滚动轴承通过套筒分隔开,第一滚动轴承和第二滚动轴承的外端面设置有盖板配合套筒。
14.所述端盖的外侧设置有盖板限位块。
15.所述从动轮一端设置有锁紧螺母和止动垫圈,从动轮与主轴之间采用键连接。
16.一种槽道式无人艇声呐布置装置的安装方法,包括以下步骤:
17.s1.准备工作,将安装过程中要用到的第一垫板、细牙套管、第二垫板、结构胶、第三垫板准备好,并且还需要准备制作槽道式无人艇艇体的模具和声呐收放槽的外形模具;
18.s2.制作碳纤维材质的艇体,将第一垫板与声呐收放槽的外形模具放置于模具的内表面;
19.s3.进行工艺铺层,在艇体上对声呐布置装置的安装部位进行局部加厚,艇体固化后脱模,将第一垫板从艇体的外表面拆除;
20.s4.为安装法兰开通孔,并在孔内加工内螺纹;
21.s5.依据声呐布置装置的安装位置在艇体的内侧对安装法兰进行定位,随后依据安装法兰的通孔位置对艇体开通孔,并在孔内加工内螺纹;
22.s6.将细牙套管拧入安装法兰和艇体的通孔内;
23.s7.在细牙套管内安装第二垫板,对安装板法兰糊制局部铺层,局部铺层完全覆盖安装法兰;
24.s8.糊制的局部铺层固化完成后,拆除第二垫板,根据艇体的通孔位置对局部铺层进行开通孔;
25.s9.在局部铺层的表面涂结构胶,齿轮箱通过结构胶与局部铺层紧密粘合,齿轮箱的四周布置内六角螺栓,艇体的外侧设置有第三垫板,第三垫板作为盲孔螺栓的安装基面,盲孔螺栓从艇体的外侧锁紧齿轮箱与安装法兰;
26.s10.根据安装法兰和齿轮箱的位置安装驱动系统和齿轮传动系统,然后安装摆臂和声呐安装底座。
27.作为上述技术方案的进一步改进:
28.局部铺层采用45
°
和90
°
的碳纤维布纵横混编铺层的方法,45
°
和90
°
碳纤维的铺层过程中采用整层布,且在铺层过程中需要层层压平。
29.所述声呐收放槽与艇体共壁。
30.所述第一垫板的材质为pvc,第二垫板的材质为木制或pvc,所述第三垫板的材质为金属。
31.本发明的有益效果如下:
32.本发明结构紧凑、合理,操作方便,通过声呐布置装置将声呐收起或放下,可以减小无人艇高速航行的航行阻力,以及减轻水面混响和波浪对声呐探测结果的影响,达到无人艇保证航速的同时兼顾水下探测任务的目的;通过设置安装法兰,可以解决异性材质的连接问题,且保证艇体的水密性。
33.本发明还具有如下优点:
34.(1)摆臂呈圆柱型,可以保证摆臂的强度和刚度,同时减少水流对摆臂的冲击。
35.(2)通过设置密封圈、动密封件进行多级密封,可以防止水渗入艇体内部。
36.(3)通过配置姿态仪,将闭环控制方法引入摆臂式声呐布置中,使声纳布置装置具备纵摇角补偿功能,声呐可以直接采集数据,不需要进行数据修正。
37.(4)通过设置编码器输出反馈信号,可以及时调整摆臂的角度,保证声呐处于最佳探测角度,从而可以搭载发射角度和功率较小的轻量声呐,使整个系统轻量化。
38.(5)声呐布置装置打开端盖就可以进行内部零件的更换,维修更换方便快捷。
39.(6)声呐安装底座为单板结构,在保护和约束声呐的同时可以减轻底座的重量。
40.(7)座板上开有一定数量的腰圆孔,便于底座适配不同型号的声呐。
41.(8)艇体的外侧设置第三垫片,并使用盲孔螺栓锁紧安装法兰,艇体内侧的局部铺层表面涂抹结构胶,可以提高无人艇的水密性,同时还可以保证安装强度。
42.(9)由于悬臂结构的根部弯矩和剪力较大,所以对艇体进行局部加厚,从而保证碳纤维艇体的局部强度。
43.(10)局部铺层采用45
°
和90
°
的碳纤维布纵横混编铺层的方法,可以提高铺层区域的局部强度。
44.(11)局部铺层过程层层压平,可以提高铺层的表面平整度,从而使艇体与局部铺层、齿轮箱与局部铺层贴合更紧密牢固以保障艇体的水密性。
附图说明
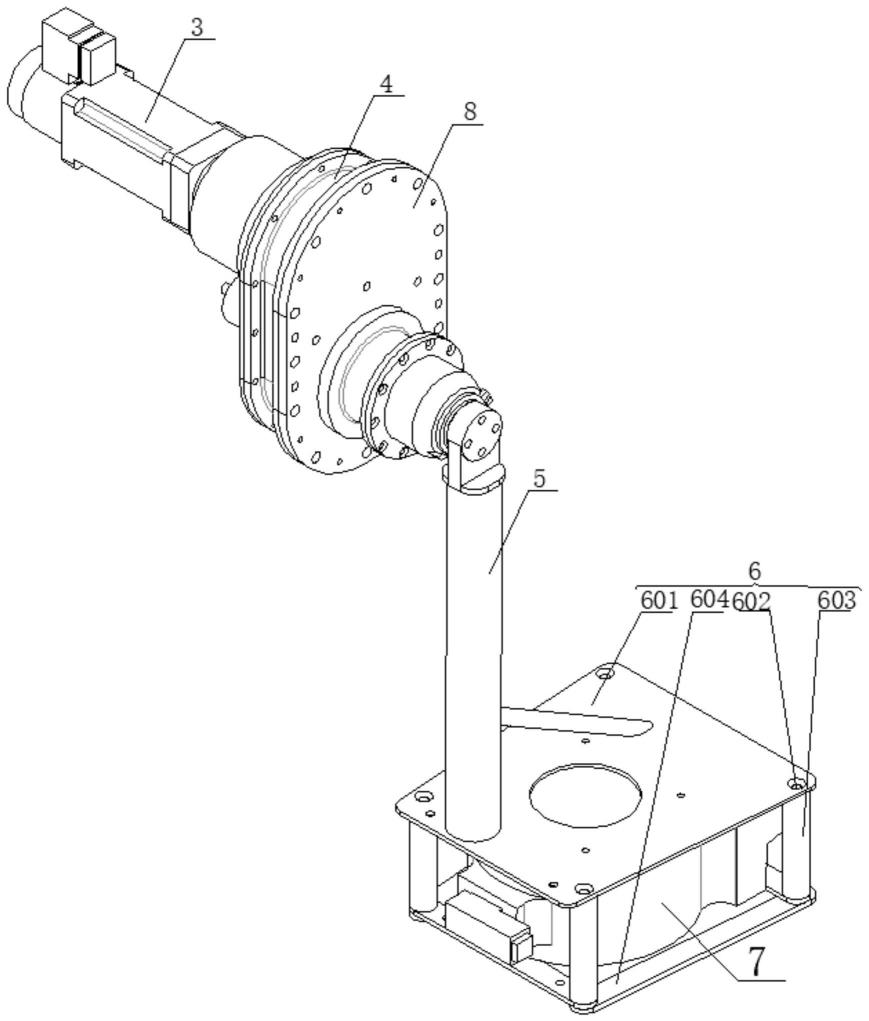
45.图1为本发明的结构示意图。
46.图2为图1的主视图。
47.图3为图2中a-a截面的剖视图。
48.图4为图3中b处的局部放大图。
49.图5为图1的侧视图。
50.图6为本发明在工作状态时的示意图。
51.图7为图6的主视图。
52.图8为图6的右视图。
53.图9为艇体翻转时本发明在工作状态的示意图。
54.图10为本发明收入声呐收放槽时的示意图。
55.图11为图10中c处的局部放大图。
56.图12为图10的右视图。
57.图13为艇体翻转时本发明收入声呐收放槽的示意图。
58.图14为图13的侧视图。
59.图15为本发明中安装法兰的结构示意图。
60.图16为本发明中第三垫板的结构示意图。
61.图17为本发明中艇体模具的主视图。
62.图18为图17的剖视图。
63.图19为本发明安装时艇体的局部状态图一。
64.图20为本发明安装时艇体的局部状态图二。
65.图21为本发明安装时艇体的局部状态图三。
66.图22为本发明安装时艇体的局部状态图四。
67.图23为本发明安装时艇体的局部状态图五。
68.图24为本发明安装时艇体的局部状态图六。
69.图25为本发明安装时艇体的局部状态图七。
70.图26为本发明安装时艇体的局部状态图八。
71.其中:1、艇体;2、声呐收放槽;3、驱动系统;4、齿轮传动系统;5、摆臂;6、声呐安装底座;7、声呐;8、安装法兰;9、碳纤维船体板;10、船体加厚板;11、第一垫板;12、细牙套管;13、第二垫板;14、局部铺层;15、结构胶;16、第三垫板;17、模具;
72.301、伺服电机;302、减速器;303、编码器
73.401、主动轮;402、从动轮;403、齿轮箱;404、主轴;405、套筒;406、第一滚动轴承;407、第二滚动轴承;408、盖板配合套筒;409、动密封件;410、端盖;411、盖板限位块;412、第一密封圈;413、第二密封圈;414、第三密封圈;415、键;416、锁紧螺母;417、止动垫圈;
74.601、座板;602、固定螺柱;603、连杆;604、限位垫片。
具体实施方式
75.下面结合附图,说明本发明的具体实施方式。
76.实施例一:
77.本实施例的结构和功能如下:
78.如图1-图15所示,一种槽道式无人艇声呐布置装置,包括艇体1,艇体1的外侧设置有声呐收放槽2,艇体1搭载声呐7,还包括安装法兰8,安装法兰8的端面固定齿轮传动系统4,齿轮传动系统4的输入端设置有驱动系统3,齿轮传动系统4的输出端伸出安装法兰8后安装摆臂5,摆臂5呈中空的圆柱形,摆臂5的底面固定呈盒形的声呐安装底座6,驱动系统3驱动声呐安装底座6从声呐收放槽2中伸出与回收。
79.齿轮传动系统4的结构为:包括与驱动系统3的输出端连接的主动轮401,主动轮401配合安装有从动轮402,从动轮402连接主轴404,主轴404的另一端连接摆臂5,主轴404的外侧面设置有滚动轴承组,滚动轴承组的前端设置有动密封件409,滚动轴承组的外部设置有端盖410,主动轮401与从动轮402的外部设置有齿轮箱403。主动轮401、从动轮402、齿轮箱403与主轴404的一部分位于艇体1的内侧。
80.声呐安装底座6的结构为:包括呈方形的座板601,座板601的中部开有数个腰圆孔,座板601的四角安装有固定螺柱602,相邻两个固定螺柱602的底部固定有限位垫片604,固定螺柱602的外部套有连杆603,声呐7通过腰圆孔与座板601固定。声呐安装底座6为单板结构,通过固定螺柱602和连杆603形成框架体系增加安装基面刚度,在保证轻量化的同时保护和约束声呐7,在座板601中部设置腰圆孔,搭配使用螺柱就可以安装固定不同型号的
声呐7。
81.端盖410与主轴404连接的端面设置有第一密封圈412,端盖410与船体连接的端面设置有第二密封圈413,齿轮箱403的内部设置有第三密封圈414。
82.驱动系统3的结构为:包括伺服电机301,伺服电机301的输出端设置有减速器302,减速器302与齿轮传动系统4的输入端连接,伺服电机301电连接编码器303,编码器303与主轴404的轴端固定。驱动机构3设置在艇体1的内侧,位于船舱中。
83.滚动轴承组的结构为:包括第一滚动轴承406和第二滚动轴承407,第一滚动轴承406和第二滚动轴承407通过套筒405分隔开,第一滚动轴承406和第二滚动轴承407的外端面设置有盖板配合套筒408。滚动轴承组可以增加主轴404的支撑面积,同时使主轴404稳定旋转。滚动轴承组安装过程中添加润滑脂。
84.端盖410的外侧设置有盖板限位块411。盖板限位块411的数量为两个,限制摆臂5的旋转角度。摆臂5与端盖410连接的端面设置有凸块,当声呐安装底座6收入声呐收放槽2中时,主轴404逆时针旋转,当旋转到端盖410一端的盖板限位块411卡住摆臂5的凸块时,声呐安装底座6完全收入声呐收放槽2中,此时主轴404停止旋转,伺服电机301保持摆臂5的旋转角度;当声呐安装底座6从声呐收放槽2中放下时,主轴404顺时针旋转,当旋转到端盖410另一端的盖板限位块411卡住摆臂5的凸块时,声呐安装底座6完全放下,声呐7开始工作,伺服电机301根据编码器303的反馈信号通过主轴404调整摆臂5的角度,使声呐7处于最佳的探测角度。设置盖板限位块411可以减轻流体长时间对驱动系统3和齿轮传动系统4的冲击,延长伺服电机301和齿轮的使用寿命。
85.从动轮402一端设置有锁紧螺母416和止动垫圈417,从动轮402与主轴404之间采用键415连接。通过锁紧螺母416和止动垫圈417防止从动轮402移位。
86.本实施例的工作过程如下:
87.先进行耐波性评估,预测无人艇高速航行姿态以及无人艇低速工况下声呐7的运动姿态,以确定声呐布置装置在艇体1上的安装位置。声呐布置装置的安装位置需要确保无人艇高速航行时声呐收放槽2位于水线以上,声呐安装底座6完全放下时其位于水线以下。
88.通过座板601上的腰圆孔将声呐7与声呐安装底座6固定,当无人艇高速航行时,声呐7需要完全收入声呐收放槽2内,伺服电机301通过减速器302驱动主动轮401旋转,从而带动从动轮402转动,从动轮402带动主轴404旋转,主轴404带动摆臂5旋转,从而将声呐7完全收起;当无人艇低速航行时,声呐7需要从声呐收放槽2中放下,伺服电机301通过齿轮传动系统4带动摆臂5旋转将声呐7放下。
89.声呐7工作时,通过无人艇配置的姿态仪可以获取艇体1的纵、横摇运动幅值和周期,经过数据处理输入给计算机,计算机根据获取到的数据输出摆臂5的需求角度给伺服电机驱动器,伺服电机驱动器输出脉冲信号驱动伺服电机301,从而调整摆臂5的旋转角度,编码器303根据主轴404的旋转角度输出脉冲信号给伺服电机驱动器,从而形成闭环控制,可以及时调整摆臂5的旋转角度以保证声呐7探测结果的准确性。
90.实施例二:
91.如图15-图26所示,以实施例一提供的一种槽道式无人艇声呐布置装置为例,本实施例提供一种槽道式无人艇声呐布置装置的安装方法。
92.包括以下步骤:
93.s1.准备工作,将安装过程中要用到的第一垫板11、细牙套管12、第二垫板13、结构胶15、第三垫板16准备好,并且还需要准备制作槽道式无人艇艇体1的模具17和声呐收放槽2的外形模具;
94.s1.1.首先为槽道式无人艇艇体1的模具17喷制胶衣,胶衣固化后进行下一步骤;
95.s2.制作碳纤维材质的艇体1,将pvc材质的第一垫板11与声呐收放槽2的外形模具放置于模具17的内表面,模具17表面固化的胶衣可以使第一垫板11与声呐收放槽2的外形模具不容易移位;
96.s2.1.根据耐波性评估结果确定声呐布置装置在艇体1上的安装位置,第一垫板11和声呐收放槽2外形模具的放置位置对应声呐布置装置的安装位置;
97.s2.2.声呐收放槽2与艇体1的横舱壁共壁,声呐收放槽2的大小可以容纳整个声呐安装底座6;
98.s3.进行工艺铺层,铺层过程中要动作轻缓,防止第一垫板11与声呐收放槽2的外形模具移位;
99.s3.1.为了方便说明,下面以艇体1局部的碳纤维船体板9指代声呐布置装置的安装部位;
100.s3.2如图19-图20所示,通过船体加厚板10对碳纤维船体板9进行局部加厚,艇体1固化后脱模,将第一垫板11从艇体1的外表面拆除;
101.s3.3.第一垫板11使碳纤维船体板9的外侧形成一个凹槽,该凹槽用于安装第三垫板16;
102.s4.为不锈钢材质的安装法兰8开通孔,并在孔内加工内螺纹;
103.s5.如图21-图22所示,依据声呐布置装置的安装位置在艇体1的内侧对安装法兰8进行定位,随后依据安装法兰8的通孔位置对艇体1开通孔,并在孔内加工内螺纹;
104.s6.如图23所示,将细牙套管12拧入安装法兰8、碳纤维船体板9和船体加厚板10的通孔内;
105.s7.如图24所示,在细牙套管12内安装第二垫板13,第二垫板13可以采用木制或pvc材质,对安装板法兰8糊制局部铺层14,局部铺层14完全覆盖安装法兰8;
106.s7.1.局部铺层14采用45
°
和90
°
的碳纤维布纵横混编铺层的方法,45
°
和90
°
碳纤维的铺层过程中采用整层布,且在铺层过程中需要层层压平;
107.s8.如图25所示,糊制的局部铺层14固化完成后,拆除第二垫板13,根据艇体1的通孔位置对局部铺层14进行开通孔;
108.s9.如图26所示,在局部铺层14的表面涂结构胶15,齿轮箱403通过结构胶15与局部铺层14紧密粘合,齿轮箱403的四周布置内六角螺栓,碳纤维船体板9的外侧设置有第三垫板16,第三垫板16作为盲孔螺栓的安装基面,盲孔螺栓从碳纤维船体板9的外侧锁紧齿轮箱403与安装法兰8;
109.s10.根据安装法兰8和齿轮箱403的位置安装驱动系统3和齿轮传动系统4,然后安装摆臂5和声呐安装底座6;
110.s10.1.伺服电机301与减速器302装配一体,将减速器302装配于齿轮箱403的输入端;
111.s10.2.齿轮箱403的输入端装配主动轮401,再配合安装从动轮402,从动轮402作
为输出端连接驱动主轴404;
112.s10.3.通过键415、锁紧螺母416和止动垫圈417将主轴404与从动轮402固定,从艇体1的外侧面安装滚动轴承组,先将第一滚动轴承406套入主轴404,在安装套筒405,最后安装第二滚动轴承407,在滚动轴承的外端安装盖板配合套筒408;
113.s10.4.再将动密封件409套在主轴404上,使用螺栓将端盖410与齿轮箱403固定;
114.s10.5.再安装摆臂5,摆臂5的底部连接声呐安装底座6,使用螺钉通过座板601上的腰圆孔固定声呐7,声呐7的电缆通过摆臂5穿过艇体1上的水密封件与艇体1内的电源连接。
115.本实施例提供的安装方法实用可靠,通过局部铺层14将安装法兰8预埋入艇体1的内部,就可以将不锈钢材质的摆臂式声呐布置装置安装在碳纤维材质的槽道式无人艇上,同时保证无人艇的水密性;在局部铺层14的糊制过程中,使用45
°
和90
°
的碳纤维布纵横混编糊制并层层压平,可以使局部铺层与艇体1的结合更紧密牢固,并且可以保证艇体1开孔区域的局部强度。
116.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。