技术特征:
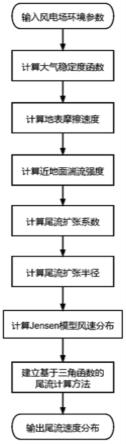
1.一种基于三角函数的风电机组尾流计算方法,其特征在于,包括:s1:确定风电场的环境参数,计算风电场区大气稳定度函数;s2:根据s1得到的大气稳定度函数计算地表摩擦速度;s3:根据s2得到的地表摩擦速度计算近地层湍流强度;s4:根据s3得到的近地层湍流强度计算尾流扩张系数;s5:建立jensen尾流模型,并根据s4得到的尾流扩张系数计算尾流半径;计算jensen尾流模型的风速分布;s6:建立基于三角函数的尾流模型,修正s5得到的jensen尾流模型的风速分布计算结果,得到风电机组的尾流速度。2.根据权利要求1所述的基于三角函数的风电机组尾流计算方法,其特征在于,s1中,风电场的环境参数包括来流速度u
∞
、地表粗糙度z0、obukhov长度l和当地纬度φ。3.根据权利要求2所述的基于三角函数的风电机组尾流计算方法,其特征在于,s1中,风电场区大气稳定度函数ψ
m
(ζ)基于大气边界层monin-obukhov相似理论计算得到:其中,z为法向坐标,中间变量t=(1-15ζ)
1/4
,是无量纲稳定度参数。4.根据权利要求3所述的基于三角函数的风电机组尾流计算方法,其特征在于,s2中,利用下式计算得到地表摩擦速度u
*
:其中κ是冯卡门常数,z
h
是机组轮毂高度。5.根据权利要求4所述的基于三角函数的风电机组尾流计算方法,其特征在于,s3具体为:近地层的流向速度脉动σ
u,s
=2.5u
*
,近地层的流向湍流强度近地层的展向湍流强度其中,f=2ωsin(φ),f为科氏力,地球自转周期ω=7.29
×
10-5
rad/s;其中,f=2ωsin(φ),f为科氏力,地球自转周期ω=7.29
×
10-5
rad/s。6.根据权利要求5所述的基于三角函数的风电机组尾流计算方法,其特征在于,s4中,尾流扩张系数k
w
=0.223i
v,h
0.022。7.根据权利要求6所述的基于三角函数的风电机组尾流计算方法,其特征在于,s5具体为:利用线性假设建立jensen尾流模型尾流半径计算方法;初始尾流半径∈=-1.91k
w
0.34;尾流半径r根据求得,其中,x为流向坐标;计算jensen风速分布,其中,轴向诱导因子c
t
为风电机组的推力系数,为初始尾流半径。8.根据权利要求1所述的基于三角函数的风电机组尾流计算方法,其特征在于,s6中,风电机组的尾流速度9.一种计算机设备,其特征在于,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至8任一项所述的基于三角函数的风电机组尾流计算方法的步骤。10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述的基于三角函数的风电机组尾流计算方法的步骤。
技术总结
本发明公开了一种基于三角函数的风电机组尾流计算方法、装置及存储介质,属于风电场微观选址技术领域。首先确定风电场的环境参数,计算风电场区大气稳定度函数,根据大气稳定度函数计算地表摩擦速度,根据地表摩擦速度计算近地层湍流强度,根据近地层湍流强度计算尾流扩张系数,建立Jensen尾流模型,并根据尾流扩张系数计算尾流半径,计算Jensen尾流模型的风速分布,最后建立基于三角函数的尾流模型,修正Jensen尾流模型的风速分布计算结果,得到风电机组的尾流速度。本发明能够显著提高风电机组尾流计算精度,从而有效提高风电场微观选址水平。观选址水平。观选址水平。
技术研发人员:程瑜 郭辰 张立英 邵振州 张国 曾利华 蒋河川 万月 杨紫藩 蒋贲 孟鹏飞
受保护的技术使用者:中国华能集团清洁能源技术研究院有限公司
技术研发日:2022.11.11
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。