1.本发明实施例涉及激光检测技术领域,尤其涉及一种激光雷达。
背景技术:
2.激光雷达的激光发射组件的发射光束被周围物体反射后形成接收光束,激光雷达的激光接收组件接收该接收光束,从而实现对周围物体的探测等。激光雷达由于具有高精度测量功能,在民用、军用领域具有广阔的发展前景。
3.图1是现有技术中的一种激光雷达的结构示意图,如图1所示,现有的激光雷达中的无线电能产生单元1、无线电能发射单元2和第二光通信单元3保持固定;无线电能接收单元4、无线电能转换单元5和第一光通信单元6设置于360
°
激光雷达的旋转部分(例如设置于电机上)共同旋转。外界电能经过无线电能产生单元1、无线电能发射单元2、无线电能接收单元4和无线电能转换单元5给第一光通信单元6和360
°
激光雷达旋转部分提供所需工作电压;第一光通信单元6通过第二光通信单元3将信息采集模组7所采集的信息传回主控制单元8进行分析处理,通过调节无线电能产生单元1来实现对无线电能接收单元4的控制,同时第一光通信单元6通过第二光通信单元3将360
°
激光雷达旋转部分的数据传回主控制单元进行分析。
4.由于现有的激光雷达是将无线电能接收单元4、无线电能转换单元5和第一光通信单元6,即无线供电模块和无线通信模块安装于旋转部分(例如设置于电机)上,无疑,这将增加旋转部分的负载,同时将无线供电模块和无线通信模块安装于旋转部分上也会引入一定的热量,如此,降低激光雷达的稳定性。此外,现有的激光雷达存在工艺和光路复杂,生产成本较高的缺陷。
技术实现要素:
5.本发明提供一种激光雷达,以实现结构轻巧、光路简单、生产成本低的效果。
6.本发明实施例提供了一种激光雷达,该激光雷达包括:转动模块、沿光线传播路径依次排列的发射模块、反射模块、光学模块以及接收模块;所述光学模块固定于所述转动模块上;
7.所述反射模块包括与所述发射模块的光轴倾斜设置的第一反射单元和与所述转动模块的旋转轴倾斜设置的第二反射单元;
8.所述发射模块用于发射激光光束;
9.所述第一反射单元用于将所述激光光束反射至所述第二反射单元;
10.所述第二反射单元用于将经过所述第一反射单元反射的激光光束反射至所述光学模块;
11.所述光学模块用于将经过所述反射模块反射的检测光束入射至被测物体,并使经由所述被测物体反射的反射光束入射至所述接收模块;
12.其中,所述转动模块用于带动所述光学模块转动,以改变所述检测光束以及所述
反射光束的方向。
13.可选的,还包括隔光模块,固定于所述光学模块上;
14.所述隔光模块用于将入射至所述被测物体的所述检测光束与经由所述被测物体反射的所述反射光束相互隔离。
15.可选的,所述隔光模块为隔离板。
16.可选的,所述隔光模块和所述光学模块为一体结构。
17.可选的,所述光学模块包括转镜;
18.所述转镜包括第一反射面和第二反射面,所述第一反射面和所述第二反射面之间的夹角为90
°
;
19.所述第一反射面用于将经过所述反射模块反射的检测光束入射至被测物体;
20.所述第二反射面用于使经由所述被测物体反射的反射光束转向入射至所述接收模块。
21.可选的,还包括隔光模块,固定于所述光学模块上;
22.所述隔光模块用于将入射至所述被测物体的所述检测光束与经由所述被测物体反射的所述反射光束相互隔离;
23.所述隔光模块位于所述第一反射面与所述第二反射面的交界处,且朝向所述被测物体的方向延伸。
24.可选的,所述第一反射单元包括第一平面反射镜,所述第二反射单元包括第二平面反射镜;
25.所述第一平面反射镜沿顺时针方向旋转与所述发射模块的光轴成第一夹角;所述第二平面反射镜沿逆时针方向旋转与所述旋转轴成第二夹角,所述第一夹角与所述第二夹角均为45
°
。
26.可选的,所述转动模块包括电机;所述电机包括定子和转子;所述转子固定于所述定子上;
27.所述光学模块固定于所述转子上;
28.所述转子围绕所述旋转轴转动。
29.可选的,还包括支撑件;所述支撑件固定于所述转动模块上;
30.所述光学模块固定于所述支撑件上。
31.可选的,还包括视窗;所述转动模块、所述发射模块、所述反射模块、所述光学模块以及所述接收模块均设置于所述视窗内。
32.本发明实施例的技术方案,只需要设置第一反射单元、第二反射单元以及光学模块既可以完成距离的探测,结构轻巧、光路简单,有利于激光雷达的小型化设计。此外,仅将光学模块固定于转动模块上,转动模块只需要带动光学模块转动即可,减小了转动模块的负载;此外转动模块上只需要安装光学模块,而不需要安装无线供电和无线通信模块,减少了转动模块的负载、体积和电路的设计难度,因此减少了转动模块、无线供电和无线通信模块引入的热量提高了激光雷达的稳定性。
附图说明
33.图1是现有技术中的一种激光雷达的结构示意图;
34.图2是本发明实施例提供的一种激光雷达的结构示意图;
35.图3是本发明实施例提供的一种转动模块处于90度位置时激光雷达的结构示意图;
36.图4是本发明实施例提供的一种转动模块处于零位的光路示意图;
37.图5是本发明实施例提供的一种转动模块处于180度位置的光路示意图;
38.图6是本发明实施例提供的又一种激光雷达的结构示意图;
39.图7是本发明实施例提供的一种转镜的结构示意图。
具体实施方式
40.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
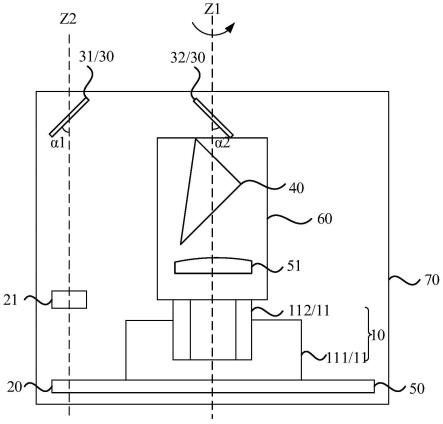
41.图2是本发明实施例提供的一种激光雷达的结构示意图,图3是本发明实施例提供的一种转动模块处于90度位置时激光雷达的结构示意图,其中,图2为转动模块处于零位的结构示意图,如图2和图3所示,本发明实施例提供的激光雷达包括:转动模块10、沿光线传播路径依次排列的发射模块20、反射模块30、光学模块40以及接收模块50;光学模块40固定于转动模块10上;反射模块30包括第一反射单元31和第二反射单元32;发射模块20用于发射激光光束;第一反射单元31与发射模块20的光轴z2倾斜设置,第一反射单元31用于将激光光束反射至第二反射单元32;第二反射单元32与转动模块10的旋转轴z1倾斜设置,第二反射单元32用于将经过第一反射单元31反射的激光光束反射至光学模块40;光学模块40用于将经过反射模块30反射的检测光束入射至被测物体,并使经由被测物体反射的反射光束入射至接收模块50;其中,转动模块10用于带动光学模块40转动,以改变检测光束以及反射光束的方向。
42.其中,转动模块10例如可以包括电机11;电机11包括定子111和转子112;转子112固定于定子111上;光学模块40固定于转子112上;转子112围绕电机旋转轴即z1转动。旋转轴z1与接收模块50的光轴重合。
43.具体的,激光雷达的控制系统驱动发射模块20发射激光光束。该激光光束依次被第一反射单元31和第二反射单元32转向,此时,转向后的激光光束的光轴与转动模块10的旋转轴z1重合。经过转向的激光光束照射至光学模块40上,通过光学模块40将激光光束进行反射后(检测光束)出射至被测物体处。被测物体反射的反射光束返回至激光雷达内部,被光学模块40转向,此时被转向的反射光束与转动模块10的旋转轴z1重合。然后被接收模块50接收,通过激光雷达内的处理模块(图中未示出)进行光电信号的转换、处理,得到距离信息。
44.可选的,由于转动模块10可以带动光学模块40围绕旋转轴z1进行360
°
旋转,当光学模块40的角度改变时,检测光束的方向以及反射光束的方向也会随之改变,如此,所以不仅可以得到距离信息,同时还可以得到360
°
角度信息。
45.示例性的,图4是本发明实施例提供的一种转动模块处于零位的光路示意图,图5是本发明实施例提供的一种转动模块处于180度位置的光路示意图。参见图4和图5,转动模块10带动光学模块40围绕旋转轴z1转动,从零位运动到180
°
位置,码盘的读数系统实时的
记录下此位置。其他位置的角度信息也以同样的方式记录,综合得到距离信息和角度信息。
46.本实施方案中,由于只需要设置第一反射单元、第二反射单元以及光学模块即可以完成距离的探测,结构轻巧、光路简单,有利于激光雷达的小型化设计。此外,仅将光学模块固定于转动模块上,转动模块只需要带动光学模块转动即可,减小了转动模块的负载;此外转动模块上只需要安装光学模块,而不需要安装无线供电和无线通信模块,减少了转动模块的负载、体积和电路的设计难度,因此减少了无线供电和无线通信模块引入的热量,减少的热量例如在1.5w以上,提高了激光雷达的稳定性。
47.可选的,发射模块20与第一反射单元31之间还设置有发射镜头21,该发射镜头21用于将发射模块20发射出的激光光束进行准直。
48.其中,经发射镜头21准直后的光束能量更集中,其对应的探测光信号可照射到更远的目标物体上,可实现更远距离的探测,从而增加扫描的范围,使激光雷达的应用更为广泛。
49.可选的,光学模块40和接收模块50之间还设置有接收镜头51,该接收镜头51用于将反射回的反射光束聚焦到接收模块50上,其中,接收模块50例如可以为雪崩光电二极管(apd)探测器。
50.其中,由于被目标物体表面存在散射,由目标物体反射产生的回波信号通常会发散,例如通过接收透镜51将发散的回波信号聚焦到接收模块50,可增强被接收模块50接收的回波信号的强度。可选的,接收镜头51和接收模块50之间还设置有滤光片(图中未示出),接收镜头51、滤光片和接收模块50沿光束的传播方向依次排列;滤光片用于通过回波信号,滤除其他波长的干扰信号。滤光片可滤除除回波信号之外的其他波长的干扰信号,即干扰信号不会被接收模块50检测到,从而提高了光信号检测模块的信噪比。将其应用到激光雷达系统中,可增加系统在强光下的探测距离。
51.可选的,继续参见图2,第一反射单元31包括第一平面反射镜,第二反射单元32包括第二平面反射镜;第一平面反射镜沿顺时针方向旋转与发射模块20的光轴z2成第一夹角α1;第二平面反射镜沿逆时针方向旋转与旋转轴z1成第二夹角α2,第一夹角α1与第二夹角α2相同,且均为45
°
。
52.如此设置,可以达到最佳的反射效果,且使得激光雷达的各结构更紧凑,有利于激光雷达的小型化设计,且设置两个平面反射镜即可改变激光光束的方向,光路简单,且成本较低激。
53.可选的,继续参见图2,该激光雷达还包括支撑件60;支撑件60固定于转动模块10上;光学模块40固定于支撑件60上。即通过支撑件60对光学模块40固定,可以使得光学模块40随着转动模块40的转动而转动。
54.可选的,继续参见图2,该激光雷达还包括视窗70;转动模块10、发射模块20、反射模块30、光学模块40以及接收模块50均设置于视窗70内。
55.如此设置,可以实现对转动模块10、发射模块20、反射模块30、光学模块40以及接收模块50的保护,可使激光雷达的适用范围更广,示例性的可适用于潮湿或有水的环境。
56.在上述各实施例的基础上,可选的,图6是本发明实施例提供的又一种激光雷达的结构示意图,如图6所示,激光雷达还包括隔光模块80,固定于光学模块40上;隔光模块80用于将入射至被测物体的检测光束与经由被测物体反射的反射光束相互隔离。也就是说,隔
光模块80将检测光路与反射光路隔离,使两路光信号之间不相互干扰,从而提高探测准确性。
57.可选的,继续参见图6,隔光模块80为隔离板;隔光板用于将入射至被测物体的检测光束与经由被测物体反射的反射光束相互隔离。
58.其中,隔离板包括相对的第一吸光面和第二吸光面,例如可以通过将隔离板的表面做哑光处理,形成第一吸光面和第二吸光面。
59.本实施例中,通过隔离板即可实现检测光路与反射光路的隔离,即本实施例中的隔光模块的结构简单,无需占用较大的体积,有利于激光雷达的小型化。
60.可选的,继续参见图6,隔光模块80和光学模块40为一体结构。如此设置,一方面,使得隔光模块80与光学模块40之间无缝隙,可以完全将检测光路与反射光路隔离,避免当隔光模块80与光学模块40为两个独立的结构时,安装在一起后,隔光模块80与光学模块40之间可能存在缝隙,产生部分干扰;另一方面,隔光模块80和光学模块40一体成型,工艺简单,且占用体积小。
61.可选的,在上述各实施例的基础上,可选的,图7是本发明实施例提供的一种转动模块的结构示意图,如图7所示,光学模块40包括转镜41;转镜41包括第一反射面411和第二反射面412,第一反射面411和第二反射面412之间的夹角为90
°
;第一反射面411用于将经过反射模块20反射的检测光束入射至被测物体;第二反射面412用于使经由被测物体反射的反射光束转向入射至接收模块50。
62.示例性的,参见图4,当转动模块10处于零位时,第一反射面411与旋转轴z1的夹角为45
°
,且第二反射面412与旋转轴z1的夹角也为45
°
;参见图5,当转动模块10处于180
°
位置时,第一反射面411与旋转轴z1的夹角为45
°
,且第二反射面412与旋转轴z1的夹角也为45
°
。
63.仅需要第一反射面411和第二反射面412即可完成检测光束的出射,以及反射光束的转向,结构简单,有利于激光雷达的小型化,且成本较低。
64.可选的,继续参见图7,由前述内容可知,激光雷达例如还可以包括固定于光学模块40的隔光模块80,用于将入射至被测物体的检测光束与经由被测物体反射的反射光束相互隔离。当激光雷达还包括隔光模块时,隔光模块位于第一反射面411与第二反射面412的交界处,且朝向被测物体的方向延伸。如此实现检测光路与反射光路的隔离,使两路光信号之间不相互干扰,提高探测准确性;且结构简单。
65.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。