基于rtk精确定位的肩扛式导弹瞄准训练装置
技术领域
1.本发明涉及导弹训练技术领域,具体为一种基于rtk精确定位的肩扛式导弹瞄准训练装置。
背景技术:
2.肩扛式导弹由于其机动性好、操作简单、隐蔽性好等特点,目前被广泛的应用,但是采用实装进行训练,由于其训练成本高、保障难度大、危险程度高等客观因素影响,因此,采用实装训练无法满足日常的频繁训练。目前,采用模拟器材进行日常训练是常用手段,研制相关的模拟训练器材有着必要的意义。瞄准跟踪训练是发射导弹过程中的重要环节,瞄准的快速性直接影响作战时机的把握,跟踪的稳定性则影响导弹的命中概率,因此,瞄准跟踪训练的模拟器材研制也是必不可少的。目前,瞄准跟踪训练的模拟器材也是层出不穷,例如:采用vr进行虚拟训练、室内进行瞄屏的虚拟训练、室外采用ccd进行真实目标的瞄准跟踪训练等多种形态。但是,这些训练方式都或多或少的存在着一些缺点。
3.虚拟瞄准训练:1、体验感不强。由于采用的是虚拟目标保障,无法提供真实目标保障,训练过程中无法体会到瞄准跟踪训练的全方位姿态体验。2、训练前期准备时间长。瞄准训练前,需要对导弹的姿态、位置进行确认,已确定其在训练过程中的操作准确性,即,对设备进行校准,该过程一般需要几分钟的时间。
4.ccd瞄准训练:1、天候影响大。由于ccd是可见光设备,其探测距离受天候影响很大,如果能见度低时,其探测距离将受到很大的影响。2、背景干扰大。采用ccd进行探测,是将采集到的图像信息进行有效的识别,来区分出目标和背景,当背景比较复杂时,其识别的错误率将会大大增高,比如:真实目标距离远时,图像会成为一个点目标,背景中掺杂有和目标类似的点图像是,将增加其识别难度。
5.两种方式还存在一个共同的缺点,即导弹姿态数据的采集,采用常规的姿态传感器进行采集时,姿态传感器受地磁的影响很大,尤其是方位数据误差及漂移量很大,无法进行精准的训练。采用进口姿态传感器虽然可以弥补一定的误差,但其成本会大大提高。
技术实现要素:
6.(一)解决的技术问题
7.针对现有技术的不足,本发明提供了一种基于rtk精确定位的肩扛式导弹瞄准训练装置,具备只要定位设备能接收到gps或北斗信号,就能确定其空间位置信息、解决背景干扰问题、训练的真实性强、训练前无需校准、不受地磁影响、且成本适中等优点。
8.(二)技术方案
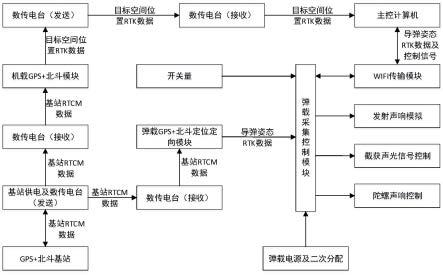
9.为实现上述只要定位设备能接收到gps或北斗信号,就能确定其空间位置信息、解决背景干扰问题、训练的真实性强、训练前无需校准、不受地磁影响、且成本适中的目的,本发明提供如下技术方案:一种基于rtk精确定位的肩扛式导弹瞄准训练装置,包括gps 北斗基站、数传电台、机载gps 北斗模块、弹载采集控制模块、弹载定位定向模块、声光控制模
块、开关量采集模块和主控计算机,所述gps 北斗基站与数传电台信号连接,所述数传电台与机载gps 北斗模块信号连接,所述数传电台与弹载定位定向模块信号连接,所述弹载定位定向模块与弹载采集控制模块信号连接,所述弹载采集控制模块通过wifi传输模块与主控计算机双向连接,所述开关量采集模块与弹载采集控制模块信号连接,所述弹载采集控制模块与声光控制模块信号连接。
10.优选的,所述gps 北斗基站接收gps l1/l2 glonass l1/l2 bds b1/b2 galileo e1/e5b 频率,采用rtk差分定位,精度为厘米级。
11.满足目前gnss测量设备对多系统兼容和高精度用户的需要,广泛应用于大地测绘、航道测绘、精准农业及海洋测量等领域,也可根据应用条件选择应用于军事领域。
12.其航空头引脚定义为:1-vcc,2-rx,3-tx,4-gnd。
13.红灯:上电红灯常亮,表示有电源输入。
14.绿灯:移动端未进入rtk模式,灯不亮;进入rtk float模式,蓝灯闪烁;进入rtkfixed模式,蓝灯常亮。作为基准站端使用时,不管任何状态都不亮。
15.优选的,所述gps 北斗基站的供电及数传电台模块包括数传电台天线接口、供电及数据接口、电源开关、充电口,启动电源开关,开关指示灯点亮,通过供电及数据接口为gps 北斗基站供电,基站上的红色电源指示灯点亮,gps 北斗基站开始工作,当搜星稳定后,通过数据接口将基站产生的rtcm基站定位数据输入至供电及数据接口,并通过图中的数传电台天线接口将rtcm数据发送至机载gps 北斗模块及弹载gps 北斗模块供其进行差分定位。其波特率为115200bps。
16.优选的,所述gps 北斗基站的rtcm数据通过数传电台(一发二收)发送端发送至机载gps 北斗rtk模块及弹载gps 北斗rtk模块,二者通过数传电台接收端串行口(波特率115200bps)接收基站rtcm数据,机载gps 北斗rtk模块如图所示,该模块j2口与基站数传电台配对的接收端相连接,j1口与另外一对数传电台的发送端相连接,ant接gps 北斗接收天线。接收基站rtcm数据后,与自身接收到的位置信息进行差分运算,并将rtk 精确的无人机空间定位数据(包括无人机经纬度、海拔高度等)通过与另外一对数传电台的发送端发送至主控计算机端的数传电台接收机,供主控计算机进行瞄准跟踪数据处理。
17.优选的,所述弹载gps 北斗rtk模块包括主天线接口、从天线接口、rtk数据输出接口、rtcm数据输入接口和
±
12v电源输入接口。 12v通过
±
12v电源输入接口为该模块供电,系统正常工作,与基站数传电台配对的接收端接收到基站rtcm数据后由rtcm数据输入接口输入,与自身接收到的位置信息进行差分运算,并计算出导弹的rtk精确位置数据 (包括导弹经纬度、海拔高度等)以及导弹的rtk精确姿态数据(采用双gps 北斗天线接收gps 北斗信号实现,包括导弹的方位角、俯仰角等,两个天线分别接到主天线接口和从天线接口),通过rtk数据输出接口将rtk定位定向数据(波特率115200bps)发送至弹载采集控制模块,弹载采集控制模块接收到导弹位置及姿态数据后通过wifi发送至主控计算机,供主控计算机进行瞄准跟踪数据处理。
18.优选的,所述弹载采集控制模块包括 12v电源接口、开关量输入口、配置串口、控制口、运行状态指示灯接口、定位定向数据接收串口、发射喇叭控制口、wifi模块、dc-dc 模块和语音播放模块。 12v电源通过 12v电源接口为采集控制模块供电,并通过dc-dc 模块实现电源的二次分配,为其他元件供电,通过运行状态指示灯接口连接的led闪烁状态判断
系统工作状态,慢闪表示系统未建立连接或处于配置状态,快闪时表示系统正常工作。板载mcu通过口每50ms采集一次开关量,并通过配置串口控制的wifi模块以心跳包的方式发送至主控计算机,当定位定向数据接收串口(开关量输入口)接收到定位定向信息后,停止发送心跳,将定位定向信息通过配置串口控制的wifi模块发送至主控计算机进行瞄准跟踪计算,发送完成,继续发送心跳包,若模拟导弹瞄准目标,主控计算机通过 wifi将瞄准标志发送至采集控制模块,mcu接收到瞄准标志后,通过控制口点亮截获指示灯并控制截获喇叭发出截获声响,当稳定跟踪后,若开关量输入口采集到的发射信号,mcu (通过控制口)控制语音播放模块播放预置的导弹发射声响,通过发射喇叭控制口控制发射喇叭发出发射声响。配置串口为配置端口,可进行固件升级及参数配置。
19.一种基于rtk精确定位的肩扛式导弹瞄准训练系统,包括目标保障无人机、模拟训练弹和评估计算机,所述目标保障无人机发送下行链路和目标位置信息到评估计算机中,所述目标保障无人机发送下行链路和目标位置信息到模拟训练弹中,所述评估计算机和模拟训练弹双向连接,所述评估计算机向模拟训练弹发送操作动作指令及数据,所述模拟训练弹向评估计算机发送训练弹姿态及位置信息。
20.可选的,所述目标保障无人机通过机载差分gps实时测量自身位置信息(包括高度) 并实时通过下行通信链路传输至地面评估计算机和模拟训练弹,供地面设备进行数据处理,所述模拟训练弹包含发射筒、gps定位定向装置、无线通讯模块及发射控制电路。
21.可选的,所述评估计算机包括工控机、无人机位置信息接收模块、无线通讯收发模块,工控机接收来自无人机的gps信息及模拟训练弹的位置和操作信息并进行数据处理,根据射手的瞄准跟踪给出合理的训练成绩评估;
22.工作原理:根据目标及训练弹上的差分gps 北斗模块可采集到目标空间位置信息和训练弹的姿态信息,通过计算可得出目标相对于训练弹的位置,称之为弹目连线,另外,训练弹通过差分gps可得到训练弹的弹轴指向,则,弹目连线和弹轴指向之间存在一个夹角α,射手在瞄准目标的过程中不断修正弹轴指向,当α角减小,弹轴指向趋近于弹目连线达到导弹瞄准视场范围内时,即可判定为截获目标,可产生声光信号,射手再对目标进行稳定的跟踪的训练;
23.瞄准原理图如附图8所示;
[0024][0025]
具体计算方法如下:
[0026]
训练弹位置为o,m为目标位置,ot为训练弹指向,om'和ot'分别为om和ot的投影;
[0027]
训练弹和目标在坐标系中的关系如附图9所示;
[0028][0029]
已知训练弹(站心)的经度、纬度、高度分别为(b0,l0,h0),无人机目标的经度、纬度、高度(b1,l1,h1),以及训练弹瞄准方位角和俯仰角在训练弹视场角要求为c时,判定训练弹是否锁定目标;
[0030]
第一步:训练弹的大地坐标(blh)转地心坐标(rcef或者称为xyz);
[0031]
[0032]
其中,e是地球椭圆第一偏心率,a,b分别为地球椭圆长轴和短轴;
[0033][0034]
得出训练弹站心的rcef坐标(x0,y0,z0))和无人机的rcef坐标(x,y,z);第二步:无人机的地心坐标(rcef)转站心坐标(enu)。已知无人机目标的经度、纬度、高度,计算无人机的站心坐标x1=(x,y,z)转换公式如下:
[0035][0036]
第三步:计算训练弹瞄准方向与无人机方向之间的夹角α,o为训练弹站心, om为瞄准方向,t为无人机目标。在站心坐标系(enu)中训练弹瞄准方向向量为:将n和无人机的站心坐标x1作内积《
·
》,并计算内积的反余弦,可以得到夹角α,公式如下:
[0037]
第四步:判定夹角是否小于训练弹视场角c,确定是否锁定目标。
[0038]
(三)有益效果
[0039]
与现有技术相比,本发明提供了一种基于rtk精确定位的肩扛式导弹瞄准训练装置,具备以下有益效果:
[0040]
1、该基于rtk精确定位的肩扛式导弹瞄准训练装置,通过目标上安装rtk定位设备,可有效解决其受天候影响及背景干扰的问题。只要定位设备能接收到gps或北斗信号,就能确定其空间位置信息,因此,训练过程中受天候影响小;只有安装定位设备的目标才会回传目标空间位置信息,可有效解决背景干扰问题。
[0041]
2、由于该装置是在室外对真实目标进行瞄准训练,训练过程中体验感会大幅提高,采用rtk精确定位定向技术可为训练提供厘米级的高精度位置信息,因其通过gps 北斗实现定位定向信息的采集,能够有效的解决因地磁影响对导弹姿态信息采集误差大的问题,确保训练的真实性。
[0042]
3、训练前无需校准。
[0043]
4、导弹采用rtk定位定向技术采集导弹姿态,不受地磁影响,且成本适中。
附图说明
[0044]
图1为本发明提出的一种基于rtk精确定位的肩扛式导弹瞄准训练装置的框图;
[0045]
图2为本发明提出的一种基于rtk精确定位的肩扛式导弹瞄准训练系统示意图;
[0046]
图3为本发明提出的一种基于rtk精确定位的肩扛式导弹瞄准训练装置的gps 北斗基站及数传电台模块的连接图;
[0047]
图4为本发明提出的一种基于rtk精确定位的肩扛式导弹瞄准训练装置的机载gps 北斗rtk模块图;
[0048]
图5为本发明提出的一种基于rtk精确定位的肩扛式导弹瞄准训练装置的弹载gps 北斗rtk模块图;
[0049]
图6为本发明提出的一种基于rtk精确定位的肩扛式导弹瞄准训练装置的数据采集及控制模块的正面图;
[0050]
图7为本发明提出的基于rtk精确定位的肩扛式导弹瞄准训练装置的数据采集及控制模块的反面图;图8为本发明的瞄准原理图;图9为发明训练弹和目标在坐标系中的关系图。
[0051]
图中:1-主天线接口、2-从天线接口、3-rtk数据输出接口、4-rtcm数据输入接口、 5
‑±
12v电源输入接口、6- 12v电源接口、7-开关量输入口、8-配置串口、9-控制口、10
‑ꢀ
运行状态指示灯接口、11-定位定向数据接收串口、12-发射喇叭控制口、13-wifi模块、 14-dc-dc模块、15-语音播放模块。
具体实施方式
[0052]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0053]
请参阅图1-7,一种基于rtk精确定位的肩扛式导弹瞄准训练装置,包括gps 北斗基站、数传电台、机载gps 北斗模块、弹载采集控制模块、弹载定位定向模块、声光控制模块、开关量采集模块和主控计算机,gps 北斗基站与数传电台信号连接,数传电台与机载 gps 北斗模块信号连接,数传电台与弹载定位定向模块信号连接,弹载定位定向模块与弹载采集控制模块信号连接,弹载采集控制模块通过wifi传输模块与主控计算机双向连接,开关量采集模块与弹载采集控制模块信号连接,弹载采集控制模块与声光控制模块信号连接。
[0054]
优选的,gps 北斗基站接收gps l1/l2 glonass l1/l2 bds b1/b2 galileo e1/e5b频率,采用rtk差分定位,精度为厘米级。
[0055]
满足目前gnss测量设备对多系统兼容和高精度用户的需要,广泛应用于大地测绘、航道测绘、精准农业及海洋测量等领域,也可根据应用条件选择应用于军事领域。
[0056]
其航空头引脚定义为:1-vcc,2-rx,3-tx,4-gnd。
[0057]
红灯:上电红灯常亮,表示有电源输入。
[0058]
绿灯:移动端未进入rtk模式,灯不亮;进入rtk float模式,蓝灯闪烁;进入rtkfixed模式,蓝灯常亮。作为基准站端使用时,不管任何状态都不亮。
[0059]
优选的,gps 北斗基站的供电及数传电台模块包括数传电台天线接口、供电及数据接口、电源开关、充电口,启动电源开关,开关指示灯点亮,通过供电及数据接口为gps 北斗基站供电,基站上的红色电源指示灯点亮,gps 北斗基站开始工作,当搜星稳定后,通过数据接口将基站产生的rtcm基站定位数据输入至供电及数据接口,并通过图中的数传电台天线接口将rtcm数据发送至机载gps 北斗模块及弹载gps 北斗模块供其进行差分定位。其波特率为115200bps。
[0060]
优选的,gps 北斗基站的rtcm数据通过数传电台(一发二收)发送端发送至机载gps 北斗rtk模块及弹载gps 北斗rtk模块,二者通过数传电台接收端串行口(波特率 115200bps)接收基站rtcm数据,机载gps 北斗rtk模块如图所示,该模块j2口与基站数传电台配对的接收端相连接,j1口与另外一对数传电台的发送端相连接,ant接gps 北斗接收天线。接收基站rtcm数据后,与自身接收到的位置信息进行差分运算,并将rtk精确的无人机空间定位数据(包括无人机经纬度、海拔高度等)通过与另外一对数传电台的发送端发送至主控计算机端的数传电台接收机,供主控计算机进行瞄准跟踪数据处理。
[0061]
优选的,弹载gps 北斗rtk模块包括主天线接口、从天线接口、rtk数据输出接口、 rtcm数据输入接口和
±
12v电源输入接口。 12v通过
±
12v电源输入接口为该模块供电,系统正常工作,与基站数传电台配对的接收端接收到基站rtcm数据后由rtcm数据输入接口输入,与自身接收到的位置信息进行差分运算,并计算出导弹的rtk精确位置数据(包括导弹经纬度、海拔高度等)以及导弹的rtk精确姿态数据(采用双gps 北斗天线接收 gps 北斗信号实现,包括导弹的方位角、俯仰角等,两个天线分别接到主天线接口和从天线接口),通过rtk数据输出接口将rtk定位定向数据(波特率115200bps)发送至弹载采集控制模块,弹载采集控制模块接收到导弹位置及姿态数据后通过wifi发送至主控计算机,供主控计算机进行瞄准跟踪数据处理。
[0062]
优选的,弹载采集控制模块包括 12v电源接口、开关量输入口、配置串口、控制口、运行状态指示灯接口、定位定向数据接收串口、发射喇叭控制口、wifi模块、dc-dc模块和语音播放模块。 12v电源通过 12v电源接口为采集控制模块供电,并通过dc-dc模块实现电源的二次分配,为其他元件供电,通过运行状态指示灯接口连接的led闪烁状态判断系统工作状态,慢闪表示系统未建立连接或处于配置状态,快闪时表示系统正常工作。板载mcu通过口每50ms采集一次开关量,并通过配置串口控制的wifi模块以心跳包的方式发送至主控计算机,当定位定向数据接收串口(开关量输入口)接收到定位定向信息后,停止发送心跳,将定位定向信息通过配置串口控制的wifi模块发送至主控计算机进行瞄准跟踪计算,发送完成,继续发送心跳包,若模拟导弹瞄准目标,主控计算机通过wifi 将瞄准标志发送至采集控制模块,mcu接收到瞄准标志后,通过控制口点亮截获指示灯并控制截获喇叭发出截获声响,当稳定跟踪后,若开关量输入口采集到的发射信号,mcu(通过控制口)控制语音播放模块播放预置的导弹发射声响,通过发射喇叭控制口控制发射喇叭发出发射声响。配置串口为配置端口,可进行固件升级及参数配置。
[0063]
一种基于rtk精确定位的肩扛式导弹瞄准训练系统,包括目标保障无人机、模拟训练弹和评估计算机,目标保障无人机发送下行链路和目标位置信息到评估计算机中,目标保障无人机发送下行链路和目标位置信息到模拟训练弹中,评估计算机和模拟训练弹双向连接,评估计算机向模拟训练弹发送操作动作指令及数据,模拟训练弹向评估计算机发送训练弹姿态及位置信息。
[0064]
实施例1:目标保障无人机通过机载差分gps实时测量自身位置信息(包括高度)并实时通过下行通信链路传输至地面评估计算机和模拟训练弹,供地面设备进行数据处理,模拟训练弹包含发射筒、gps定位定向装置、无线通讯模块及发射控制电路。
[0065]
实施例2:评估计算机包括工控机、无人机位置信息接收模块、无线通讯收发模块,工控机接收来自无人机的gps信息及模拟训练弹的位置和操作信息并进行数据处理,根据
射手的瞄准跟踪给出合理的训练成绩评估;
[0066]
工作原理:根据目标及训练弹上的差分gps 北斗模块可采集到目标空间位置信息和训练弹的姿态信息,通过计算可得出目标相对于训练弹的位置,称之为弹目连线,另外,训练弹通过差分gps可得到训练弹的弹轴指向,则,弹目连线和弹轴指向之间存在一个夹角α,射手在瞄准目标的过程中不断修正弹轴指向,当α角减小,弹轴指向趋近于弹目连线达到导弹瞄准视场范围内时,即可判定为截获目标,可产生声光信号,射手再对目标进行稳定的跟踪的训练;
[0067]
瞄准原理如附图8所示;
[0068][0069]
具体计算方法如下:
[0070]
训练弹位置为o,m为目标位置,ot为训练弹指向,om'和ot'分别为om和ot的投影;
[0071]
训练弹和目标在坐标系中的关系如附图9所示;
[0072][0073]
已知训练弹(站心)的经度、纬度、高度分别为(b0,l0,h0),无人机目标的经度、纬度、高度(b1,l1,h1),以及训练弹瞄准方位角和俯仰角在训练弹视场角要求为c时,判定训练弹是否锁定目标;
[0074]
第一步:训练弹的大地坐标(blh)转地心坐标(rcef或者称为xyz);
[0075][0076]
其中,e是地球椭圆第一偏心率,a,b分别为地球椭圆长轴和短轴;
[0077][0078]
得出训练弹站心的rcef坐标(x0,y0,z0))和无人机的rcef坐标(x,y,z);第二步:无人机的地心坐标(rcef)转站心坐标(enu)。已知无人机目标的经度、纬度、高度,计算无人机的站心坐标x1=(x,y,z)转换公式如下:
[0079][0080]
第三步:计算训练弹瞄准方向与无人机方向之间的夹角α,o为训练弹站心, om为瞄准方向,t为无人机目标。在站心坐标系(enu)中训练弹瞄准方向向量为:将n和无人机的站心坐标x1作内积《
·
》,并计算内积的反余弦,可以得到夹角α,公式如下:
[0081]
第四步:判定夹角是否小于训练弹视场角c,确定是否锁定目标。
[0082]
综上所述,该基于rtk精确定位的肩扛式导弹瞄准训练装置,通过在模拟的目标上安装rtk定位设备,可有效解决其受天候影响及背景干扰的问题。只要定位设备能接收到gps 或北斗信号,就能确定其空间位置信息,因此,训练过程中受天候影响小;只有安装定位设备的目标才会回传目标空间位置信息,可有效解决背景干扰问题;由于该装置是在室外对真实目标进行瞄准训练,训练过程中体验感会大幅提高,采用rtk精确定位定向技术可为训练提供厘米级的高精度位置信息,因其通过gps 北斗实现定位定向信息的采集,能够有效的解决因地磁影响对导弹姿态信息采集误差大的问题,确保训练的真实性;训练前无需校准;导弹采用rtk定位定向技术采集导弹姿态,不受地磁影响,且成本适中。
[0083]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0084]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。