1.本发明涉及空气净化技术领域,具体为一种紫外消杀结合空气净化的自动路径规划系统。
背景技术:
2.目前许多传播链的源头来自冷链、外来人员或海关物流。所以对于仓库、冷冻库、机场等物流频繁又面积广大的场景急需一直高效的消杀方案。对于感染者密切接触的事物和驻留过的场所,如医院、感染者住所、感染者的办公场所等场景也需要一种无接触式、自动化的消杀方案。
3.目前在这些场景中的主要消杀手段一种是人工喷洒消毒药水,这种方式不仅会将人较长时间的暴露在风险环境中还会由于人为原因导致消杀不彻底,并且人工成本较大;另一种是利用固定悬挂消杀灯,这种消杀方式节省了人力也避免了人较长时间暴露在风险环境,但是由于固定安装,必然存在消杀死角,更严重的情况,如果有人员意外闯入,会对人体造成不可逆的损害。
4.因此,设计实用性强的一种紫外消杀结合空气净化的自动路径规划系统是很有必要的。
技术实现要素:
5.本发明的目的在于提供一种紫外消杀结合空气净化的自动路径规划系统,以解决上述背景技术中提出的问题。
6.为了解决上述技术问题,本发明提供如下技术方案:一种紫外消杀结合空气净化的自动路径规划系统,包括环境消杀控制系统、空气消杀与净化系统、 uvc-led、人机交互系统、任务控制系统、空气质量检测系统、移动控制系统、人体保护警戒系统、机器人防跌倒系统;
7.包括激光雷达、相机、超声波、惯性测量单元等传感器,以工业控制计算机作为处理单元,采用工业平板作为人机交互界面,以uvc-led、光触媒、高锰酸钾粒子、纳米纤维hepa过滤网对环境进行消杀与净化;
8.超声波传感器位于机器人底部,能使机器人感知所处的路面是否有阶梯或者凹坑,以此构建消杀机器人的防跌倒系统。
9.根据上述技术方案,所述空气质量检测系统与人机交互系统连通,空气检测系统采集空气中的甲醛、总挥发性有机化合物、pm2.5、pm10、二氧化碳含量和温度、湿度信息交由人机交互系统显示出来;空气质量检测系统还会生成空气质量地图,作为机器人路径规划的重要参数之一,形成一个闭环的空气净化系统。
10.根据上述技术方案,所述空气消杀与净化系统、环境消杀控制系统与任务控制系统连通,环境消杀控制系统接收来自任务控制系统的信号来驱动 uvc-led,空气消杀与净化系统接收任务控制的信号来驱动机器人内部风机的运行,空气消杀与净化系统内部还置
有风动开关感知风速。
11.根据上述技术方案,所述移动控制系统与任务控制系统连通,联合执行:建图、存图、换图、修图、虚拟墙限制、自动路径规划、手动添加路径、无人值守执行任务、自动充电的智能化任务。
12.根据上述技术方案,所述人体保护警戒系统由相机传感器采用人体识别算法、人体距离计算算法监控人体是否意外暴露于消杀作业中,如果识别到人体则发送信号给任务控制系统以关闭uvc-led。
13.根据上述技术方案,该系统的控制方法为:
14.当人体保护警戒系统工作时,位于机器人左侧、右侧、正前方的三个相机检测人体,在执行消杀任务时,如果相机检测到人体则关闭uvc-led,位于消杀机器人四周的6个超声波传感器实时探测与障碍物和人体的距离,如果过近,及时发送信号给移动控制系统停止运动;
15.空气质量检测系统使用双调和插值算法生成空气质量热图,作为机器人路径规划的重要参数之一,形成一个闭环的空气净化系统。
16.根据上述技术方案,使用相机进行桌椅识别,将桌椅语义加入到建图信息中,作为路径规划的参数之一,可针对桌椅这种人体密切接触的物体进行高效消杀。
17.根据上述技术方案,所述移动控制系统的工作方法为:通过激光雷达结合机器人自身旋转运动、位移运动实现对周围环境的平面扫描,获取周围环境的稀疏激光数据,然后结合稀疏数据成像算法获取外界环境的深度数据信息,并结合惯性测量单元和轮速计对机器人自身进行位置估计,利用基于多传感器信息融合的slam算法完成对机器人的自身定位于地图构建。
18.根据上述技术方案,所述移动控制系统利用路径规划算法,实现消杀机器人自主建图、自动避障、全覆盖消杀、自动充电。
19.根据上述技术方案,所述人机交互系统的功能是:接收来自操作人员的设定,如:消杀区域、手动添加消杀路径、定时任务、虚拟墙、修改地图、多图存储等,并将数据传送给任务控制系统和移动控制系统完成相应的任务;还有就是显示和记录消杀机器人的状态,如:消杀任务进度、预计完成时间、历史任务报告、机器人构建的地图、机器人所在的位置、剩余电量、上传机器人状态到服务器。
20.与现有技术相比,本发明所达到的有益效果是:本发明,提高空气净化效率,针对性的净化环境内的空气,本发明提出了一种依据空气质量信息建立空气质量地图,针对性的规划空气净化路径的方案。因为紫外线消杀的危险性,本发明提出了专用于此类的场景的人体警戒系统,能够充分保护人体的安全。
附图说明
21.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
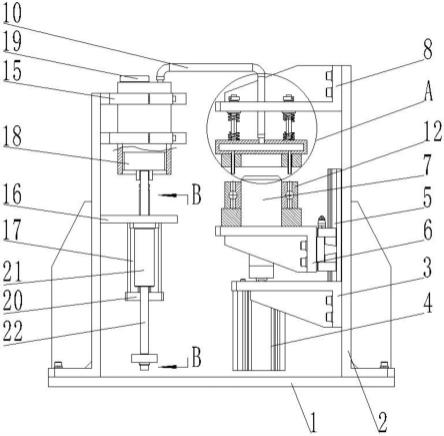
22.图1是本发明的整体硬件架构示意图;
23.图2是本发明的整体软件架构示意图;
24.图3是本发明的地图管理逻辑示意图;
25.图4是本发明的人体保护警戒的原理示意图;
26.图5是本发明的空气质量检测系统原理示意图;
27.图6是本发明的路径规划原理示意图;
28.图7是本发明的机器人移动控制系统原理示意图。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.请参阅图1-图7,本发明提供技术方案:一种紫外消杀结合空气净化的自动路径规划系统,包括环境消杀控制系统、空气消杀与净化系统、uvc-led、人机交互系统、任务控制系统、空气质量检测系统、移动控制系统、人体保护警戒系统、机器人防跌倒系统;
31.包括激光雷达、相机、超声波、惯性测量单元等传感器,以工业控制计算机作为处理单元,采用工业平板作为人机交互界面,以uvc-led、光触媒、高锰酸钾粒子、纳米纤维hepa过滤网对环境进行消杀与净化;
32.超声波传感器位于机器人底部,能使机器人感知所处的路面是否有阶梯或者凹坑,以此构建消杀机器人的防跌倒系统;
33.空气质量检测系统与人机交互系统连通,空气检测系统采集空气中的甲醛、总挥发性有机化合物、pm2.5、pm10、二氧化碳含量和温度、湿度信息交由人机交互系统显示出来;空气质量检测系统还会生成空气质量地图,作为机器人路径规划的重要参数之一,形成一个闭环的空气净化系统;
34.空气消杀与净化系统、环境消杀控制系统与任务控制系统连通,环境消杀控制系统接收来自任务控制系统的信号来驱动uvc-led,空气消杀与净化系统接收任务控制的信号来驱动机器人内部风机的运行,空气消杀与净化系统内部还置有风动开关感知风速;
35.移动控制系统与任务控制系统连通,联合执行:建图、存图、换图、修图、虚拟墙限制、自动路径规划、手动添加路径、无人值守执行任务、自动充电的智能化任务;
36.人体保护警戒系统由相机传感器采用人体识别算法、人体距离计算算法监控人体是否意外暴露于消杀作业中,如果识别到人体则发送信号给任务控制系统以关闭uvc-led;
37.该系统的控制方法为:
38.当人体保护警戒系统工作时,位于机器人左侧、右侧、正前方的三个相机检测人体,在执行消杀任务时,如果相机检测到人体则关闭uvc-led,位于消杀机器人四周的6个超声波传感器实时探测与障碍物和人体的距离,如果过近,及时发送信号给移动控制系统停止运动;
39.空气质量检测系统使用双调和插值算法生成空气质量热图,作为机器人路径规划的重要参数之一,形成一个闭环的空气净化系统;
40.使用相机进行桌椅识别,将桌椅语义加入到建图信息中,作为路径规划的参数之一,可针对桌椅这种人体密切接触的物体进行高效消杀;
41.移动控制系统的工作方法为:通过激光雷达结合机器人自身旋转运动、位移运动
实现对周围环境的平面扫描,获取周围环境的稀疏激光数据,然后结合稀疏数据成像算法获取外界环境的深度数据信息,并结合惯性测量单元和轮速计对机器人自身进行位置估计,利用基于多传感器信息融合的slam算法完成对机器人的自身定位于地图构建;
42.移动控制系统利用路径规划算法,实现消杀机器人自主建图、自动避障、全覆盖消杀、自动充电;
43.人机交互系统的功能是:接收来自操作人员的设定,如:消杀区域、手动添加消杀路径、定时任务、虚拟墙、修改地图、多图存储等,并将数据传送给任务控制系统和移动控制系统完成相应的任务;还有就是显示和记录消杀机器人的状态,如:消杀任务进度、预计完成时间、历史任务报告、机器人构建的地图、机器人所在的位置、剩余电量、上传机器人状态到服务器。
44.本发明提高空气净化效率,针对性的净化环境内的空气,本发明提出了一种依据空气质量信息建立空气质量地图,针对性的规划空气净化路径的方案。因为紫外线消杀的危险性,本发明提出了专用于此类的场景的人体警戒系统,能够充分保护人体的安全。
45.利用相机建立的注意力地图并以此进行路径规划、利用空气质量检测系统建立的空气质量地图并以此进行路径规划、利用相机识别人体的人体警戒系统都是现有最好技术所不具备的。
46.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
47.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。