用于控制中心波长的系统和方法
1.相关申请的交叉引用
2.本技术要求于2020年6月9日提交的美国申请no.63/036,700的优先权,并且也要求于2020年9月16日提交的美国申请no.63/079,191的优先权,这两个申请都题为“systems and methods for controlling a center wavelength”,并且这两个申请都通过引用整体并入本文。
技术领域
3.本公开涉及激光系统(诸如产生光的准分子激光器)、以及用于控制其中心波长的系统和方法。
背景技术:
4.光刻设备是一种被构造为将期望图案施加到衬底上的机器。光刻设备可以用于例如集成电路(ic)的制造。光刻设备可以例如将图案化装置(例如,掩模、掩模版)的图案投影到衬底上提供的辐射敏感材料(抗蚀剂)层上。
5.为了在衬底上投影图案,光刻设备可以使用电磁辐射。这种辐射的波长决定了可以在衬底上形成的特征的最小尺寸。光刻设备可使用波长在4-20nm范围内(例如,6.7nm或13.5nm)的极紫外(euv)辐射、或波长在约120nm至约400nm范围内(例如,193nm或248nm)的深紫外(duv)辐射。
6.主振荡器功率放大器(mopa)是一种两级光学谐振器布置,其可以产生高度相干的放大光束。mopa的性能主要取决于主振荡器(mo)的对准。mo的对准可以包括气体放电室的对准、输入/输出光学元件的对准、以及光谱特征调节器的对准。
7.然而,mo的对准可能很耗时并且需要若干小时的手动维护。此外,mo对准的监测和调节可能抑制或阻挡例如到duv光刻设备的输出光束。
8.此外,当设备经历热瞬变和其他瞬变时,波长稳定性受到影响。在单色模式下,两个致动器(即,步进电机和压电换能器(pzt))彼此协同工作以稳定中心波长。在操作中,步进电机具有有限的分辨率,并且因此,pzt用作主致动器。然而,在双色模式下,波长稳定性基于中心波长,即,两个交替光谱的平均值,并且在这种模式下,pzt的任务是产生生成交替波长的波形。
技术实现要素:
9.因此,需要控制中心波长。
10.在一些实施例中,本公开涉及一种用于控制成像操作的中心波长的系统和方法。该系统可以包括:被配置为控制第一棱镜的移动的第一致动器、被配置为控制第二棱镜的移动的第二致动器、以及控制器,该控制器被配置为;基于所估计的中心波长误差确定第一致动器的第一致动量;引起第一致动器基于第一致动量进行致动;确定第一棱镜是否偏离中心;响应于确定第一棱镜偏离中心,确定第一致动器的第二致动量并且确定第二致动器
的第三致动量;并且引起第一致动器和第二致动器分别基于第二致动量和第三致动量进行致动。
11.该方法可以包括估计中心波长误差。该方法还可以包括基于所估计的中心波长误差确定控制第一棱镜的移动的第一致动器的第一致动量。该方法还可以包括基于第一致动量致动第一致动器。该方法还可以包括确定第一棱镜是否偏离中心。该方法还可以包括:响应于确定第一棱镜偏离中心,确定第一致动器的第二致动量并且确定用于控制第二棱镜的移动的第二致动器的第三致动量。该方法还可以包括分别基于第二致动量和第三致动量致动第一致动器和第二致动器。在一些实施例中,该方法可以使用该系统来执行。
12.在一些实施例中,估计中心波长误差可以包括计算奇数突发处的中心波长的第一平均值和偶数突发处的中心波长的第二平均值,并且确定第一平均值和第二平均值的平均值,其中中心波长误差基于第一平均值和第二平均值的平均值。
13.在一些实施例中,确定第一致动量可以包括确定目标中心波长与估计中心波长之间的差,并且基于目标中心波长与估计中心波长之间的差来确定第一致动量。
14.在一些实施例中,确定目标中心波长与估计中心波长之间的差可以包括使用数字滤波器确定该差。
15.在一些实施例中,确定第二致动器的第三致动量可以基于在基于第二致动量致动第一致动器之后第一棱镜的位置。
16.在一些实施例中,确定第三致动量还可以包括确定第三致动量以减小目标中心波长与估计波长之间的差。
17.在一些实施例中,成像操作包括多焦点成像操作,并且该方法还可以包括以双色模式操作光源。在一些实施例中,以双色模式操作光源可以包括:使用第一激光室模块生成第一波长的第一激光辐射束;使用第二激光室模块生成第二波长的第二激光辐射束;以及使用射束组合器沿着公共输出射束路径组合第一激光辐射和第二激光辐射。在一些实施例中,估计中心波长误差可以包括估计第一激光辐射束的中心波长误差。在一些实施例中,在双色模式下,波长目标可以在突发内的两个已知设定点之间交替(例如,每个脉冲),并且pzt可以用于跟踪快速变化的目标,该目标几乎没有余量来控制中心波长。
18.在一些实施例中,本公开涉及一种用于控制中心波长的系统和方法。该系统可以包括:被配置为生成光束的光源;被配置为控制第一棱镜的移动的第一致动器;被配置为控制第二棱镜的移动的第二致动器;以及控制器。控制器可以被配置为:确定由光源生成的光束的波长误差;确定波长误差是否大于第一阈值;响应于确定波长误差大于第一阈值,引起第一致动器移动第一步长;响应于确定波长误差小于第一阈值,确定平均波长误差;确定平均波长误差是否大于不同于第一阈值的第二阈值;响应于确定平均波长误差大于第二阈值,引起第一致动器移动第二步长并且启用低通滤波器;以及响应于确定平均波长误差小于第二阈值,启用低通滤波器,更新施加到第二致动器的电压,并且引起第一致动器移动第三步长。
19.该方法可以包括确定由光源生成的光束的波长误差。该方法还可以包括确定波长误差是否大于第一阈值。该方法还可以包括:响应于确定波长误差大于第一阈值,将第一致动器移动第一步长,第一致动器被配置为控制第一棱镜的移动。响应于确定波长误差小于第一阈值,该方法还可以包括:确定平均波长误差;确定平均波长误差是否大于不同于第一
阈值的第二阈值;响应于确定平均波长误差大于第二阈值,将第一致动器移动第二步长并且启用低通滤波器;以及响应于确定平均波长误差小于第二阈值,启用低通滤波器,更新施加到第二致动器的电压,并且将第一致动器移动第三步长,第二致动器被配置为控制第二棱镜的移动。在一些实施例中,该方法可以使用该系统来执行。
20.在一些实施例中,确定波长误差可以包括测量由光源生成的光束的中心波长,并且确定中心波长与目标中心波长之间的差。
21.在一些实施例中,该方法还可以包括确定光源的脉冲的发射次数是否是更新间隔的倍数,并且响应于确定发射次数等于更新间隔,更新施加到第二致动器的电压。
22.在一些实施例中,该方法可还包括响应于确定波长误差大于第一阈值而禁用低通滤波器和第二致动器的移动。
23.在一些实施例中,第一步长是致动器的固定步长。
24.在一些实施例中,第二步长依据波长误差。
25.在一些实施例中,第三步长依据施加到第二致动器的电压。
26.在一些实施例中,以第二步长移动第一致动器包括每n个脉冲移动第一致动器,其中n大于1。
27.在一些实施例中,平均波长误差基于波长误差和多个脉冲之上的多个波长误差的平均值。
28.在一些实施例中,该方法包括在多焦点成像操作中控制中心波长,并且该方法还可以包括以双色模式操作光源。在一些实施例中,以双色模式操作光源可以包括:使用第一激光室模块生成第一波长的第一激光辐射束;使用第二激光室模块生成第二波长的第二激光辐射束;以及使用射束组合器沿着公共输出射束路径组合第一激光辐射和第二激光辐射。在一些实施例中,确定由光源生成的光束的波长误差包括确定第一激光辐射束的中心波长误差。在一些实施例中,在双色模式下,波长目标可以在突发内的两个已知设定点之间交替(例如,每个脉冲),并且pzt可以用于跟踪快速变化的目标,该目标几乎没有余量来控制中心波长。
29.在一些实施例中,本公开涉及一种用于控制多焦点成像操作的中心波长的系统和方法。该系统可以包括:被配置为控制棱镜的移动的致动器;以及控制器,该控制器被配置为:将抖动波形与用于移动致动器的偏移值相结合;基于抖动波形和偏移值生成脉冲间波长;基于多个脉冲的脉冲间波长生成中心波长的滚动平均值;估计漂移速率以预测未来脉冲的中心波长;并且基于所估计的漂移速率更新偏移值。
30.该方法可以包括将抖动波形与用于移动控制棱镜的移动的致动器的偏移值相结合。该方法还可以包括基于抖动波形和偏移值生成脉冲间波长。该方法还可以包括基于多个脉冲的脉冲间波长生成中心波长的滚动平均值。该方法还可以包括估计漂移速率以预测未来脉冲的中心波长。该方法还可以包括基于所估计的漂移速率更新偏移值。在一些实施例中,该方法可以使用该系统来执行。
31.在一些实施例中,偏移值基于直流(dc)电压。
32.在一些实施例中,dc电压的初始值为零伏。
33.在一些实施例中,偏移值包括第一偏移值,并且估计漂移速率可以包括基于中心波长的滚动平均值、第一偏移值、和移动控制第二棱镜的移动的第二致动器的第二偏移值
来估计漂移速率。
34.在一些实施例中,估计漂移速率可以包括使用卡尔曼滤波器框架来估计累积的中心波长漂移速率。
35.在一些实施例中,估计漂移速率可以包括在当前脉冲之前n个脉冲预测中心波长。
36.在一些实施例中,估计漂移速率可以包括将卡尔曼滤波器框架转换为卡尔曼预测器以在当前脉冲之前n个脉冲预测中心波长。
37.在一些实施例中,多个脉冲的脉冲间波长包括当前脉冲的波长。
38.在一些实施例中,更新偏移值可以包括基于突发结束时中心波长的滚动平均值来更新偏移值。
39.在一些实施例中,多焦点成像操作包括双色模式,并且该方法还可以包括以双色模式操作光源。在一些实施例中,以双色模式操作光源可以包括:使用第一激光室模块生成第一波长的第一激光辐射束;使用第二激光室模块生成第二波长的第二激光辐射束;以及使用射束组合器沿着公共输出射束路径组合第一激光辐射和第二激光辐射。
40.以下参考附图详细描述实施例的其他特征和示例性方面、以及各种实施例的结构和操作。注意,实施例不限于本文中描述的特定实施例。本文中仅出于说明目的而呈现这样的实施例。基于本文中包括的教导,其他实施例对于相关领域的技术人员将是很清楚的。
附图说明
41.并入本文中并且构成说明书的一部分的附图说明了实施例,并且与说明书一起进一步用于解释实施例的原理,并且使得相关领域的技术人员能够制作和使用实施例。
42.图1是根据示例性实施例的光刻设备的示意图。
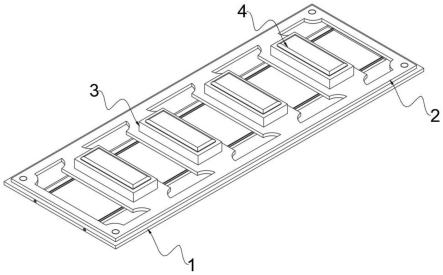
43.图2是根据示例性实施例的光源设备的示意性俯视图。
44.图3是根据示例性实施例的图2所示的光源设备的气体放电级的示意性局部截面图。
45.图4是根据示例性实施例的图2所示的光源设备的气体放电级的示意性局部截面图。
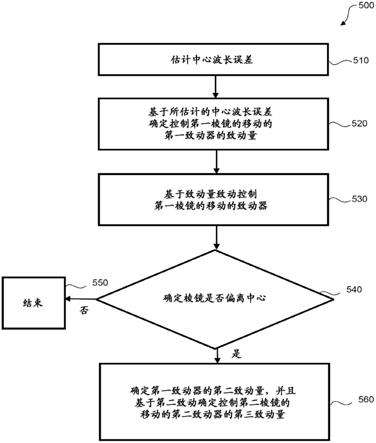
46.图5示出了根据一个实施例的用于调节多焦点成像的中心波长的方法。
47.图6a-图6b、图7和图8示出了根据一些实施例的用于调节多焦点成像的中心波长的方法。
48.图9示出了根据示例性实施例的用于对准气体放电级的流程图。
49.图10是用于实现本公开的各种实施例的示例计算机系统。
50.当结合附图进行详细描述时,实施例的特征和示例性方面将从下面阐述的详细描述中变得更加明显,其中相同的附图标记始终标识对应元素。在附图中,相同的附图标记通常表示相同的、功能相似的和/或结构相似的元素。此外,通常,附图标记的最左侧的数字表示附图标记首次出现的图。除非另有说明,否则在整个公开中提供的附图不应当被解释为比例图。
具体实施方式
51.本说明书公开了结合本发明的特征的一个或多个实施例。(多个)所公开的实施例
仅例示了本发明。本发明的范围不限于(多个)所公开的实施例。本发明由所附权利要求限定。
52.(多个)所描述的实施例、以及说明书中对“一个实施例”、“实施例”和“示例性实施例”等的引用表明(多个)所描述的实施例可以包括特定的特征、结构或特性,但每个实施例不一定包括特定的特征、结构或特性。此外,这样的短语不一定是指同一实施例。此外,当结合实施例描述特定的特征、结构或特性时,应当理解,结合其他实施例来实现这样的特征、结构和特性在本领域技术人员的知识范围内,无论是否明确描述。
53.为了便于描述,本文中可以使用诸如“下面”、“下方”,“下部”和“上方”、“上”、“上部”等空间相对术语,以描述一个元素或特征与图中所示的另一(多个)元素和(多个)特征的关系。除了图中所示的取向之外,空间相对术语旨在涵盖使用或操作中设备的不同取向。该设备可以以其他方式定向(旋转90度或以其他取向),并且本文中使用的空间相对描述符也可以相应地解释。
54.本文中使用的术语“大约”或“基本上”或“近似”表示给定数量的值,该值可以根据特定技术而变化。基于特定技术,术语“大约”或“基本上”或“近似”可以表示给定量的值,例如,在该值的1-15%范围内变化(例如,该值的
±
1%、
±
2%、
±
5%、
±
10%或
±
15%)。
55.本公开的实施例可以以硬件、固件、软件或其任何组合来实现。本公开的实施例还可以实现为存储在有形机器可读介质上的指令,该指令可以由一个或多个处理器读取和执行。机器可读介质可以包括用于以机器(例如,计算设备)可读的形式存储或传输信息的任何机制。例如,机器可读介质可以包括只读存储器(rom);随机存取存储器(ram);磁盘存储介质;光存储介质;闪存设备;电、光、声或其他形式的传播信号(例如,载波、红外信号、数字信号等)等。此外,固件、软件、例程和/或指令可以在本文中描述为执行某些动作。然而,应当理解,这样的描述仅仅是为了方便,并且这样的动作实际上是由执行固件、软件、例程、指令等的计算设备、处理器、控制器或其他设备产生的。
56.然而,在更详细地描述这样的实施例之前,呈现可以在其中实现本公开的实施例的示例环境是有指导意义的。
57.示例性光刻系统
58.图1示出了包括辐射源so和光刻设备la的光刻系统。辐射源so被配置为生成euv和/或duv辐射束b并且向光刻设备la提供euv和/或duv辐射束b。光刻设备la包括照明系统il、被配置为支撑图案化装置ma(例如,掩模)的支撑结构mt、投影系统ps、和被配置为支撑衬底w的衬底台wt。
59.照明系统il被配置为在euv和/或duv辐射束b入射到图案化装置ma之前调节euv和/或duv辐射束b。因此,照明系统il可以包括琢面场反射镜装置10和琢面光瞳反射镜装置11。琢面场反射镜装置10和琢面光瞳反射镜装置11一起提供具有期望横截面形状和期望强度分布的euv和/或duv辐射束b。除了或代替琢面场反射镜装置10和琢面光瞳反射镜装置11,照明系统il可以包括其他反射镜或装置。
60.在如此调节之后,euv和/或duv辐射束b与图案化装置ma(例如,用于duv的透射掩模或用于euv的反射掩模)相互作用。作为这种相互作用的结果,生成了图案化euv和/或duv辐射束b'。投影系统ps被配置为将图案化euv和/或duv辐射束b'投影到衬底w上。为此,投影系统ps可以包括多个反射镜13、14,反射镜13、14被配置为将图案化euv和/或duv辐射束b'
投射到由衬底台wt保持的衬底w上。投影系统ps可以对图案化euv和/或duv辐射束b'施加减小因子,从而形成具有与图案化装置ma上的对应特征相比较小的特征的图像。例如,可以施加为4或8的减小因子。尽管投影系统ps在图1中被示出为仅具有两个反射镜13、14,但是投影系统ps可以包括不同数目的反射镜(例如,六个或八个反射镜)。
61.衬底w可以包括先前形成的图案。在这种情况下,光刻设备la将由图案化euv和/或duv辐射束b'形成的图像与先前在衬底w上形成的图案对准。
62.可以在辐射源so、照明系统il和/或投影系统ps中提供相对真空,即,压力远低于大气压的少量气体(例如,氢气)。
63.示例性光源设备
64.如上所述,主振荡器功率放大器(mopa)是一种两级光学谐振器布置。主振荡器(mo)(例如,第一光学谐振器级)产生高度相干的光束(例如,来自种子激光器)。功率放大器(pa)(例如,第二光学谐振器级)增加光束的光功率,同时保持射束特性。mo可以包括气体放电室、输入/输出光学元件(例如,光学耦合器(oc))和光谱特征调节器(例如,线宽变窄模块(lnm))。输入/输出光学元件和光谱特征调节器可以围绕气体放电室以形成光学谐振器。
65.mopa的性能主要取决于mo的对准。mo的对准可以包括气体放电室的对准、oc的对准和lnm的对准。每个对准(例如,腔室、oc、lnm等)都会导致对准误差和mo随时间的变化。然而,mo的校准可能很耗时并且需要若干小时的手动维护(例如,同步性能维护(spm))。此外,如果腔室、oc和lnm严重未对准(例如,没有初始参考点),则初始对准可能很困难(例如,试错)。此外,mo对准的监测和调节可能抑制(例如,阻挡)例如到duv光刻设备的输出射束(例如,duv射束)。
66.成像光(例如,视觉激光束)可以投射在腔室、oc和lnm上(例如,顺序地或同时地),以照亮oc和/或lnm并且引导其沿着腔室的光轴(例如,第一光学端口和第二光学端口)对准。来自气体放电室的放大自发发射(ase)可以充当信标(例如,参考点),以促进成像光沿着mo腔的光轴(例如,沿着腔室的光轴、oc和lnm)的瞄准(例如,激光瞄准)。此外,ase可以用于最初将腔室与mo腔的光轴对准(例如,粗略对准)。此外,感测设备(例如,相机)可以用于在视觉上调查mo内的不同物体平面(例如,腔室端口、oc孔、lnm孔等)并且量化任何对准误差(例如,图像比较)。例如,感测设备可以调查各种物体平面上的成像光的近场(nf)和远场(ff)区域,并且例如通过射束轮廓(例如,水平对称、竖直对称等)来应用调节(例如,精细对准)。
67.如下所述的光源设备和系统可以减少主振荡器的对准时间(例如,spm),减少主振荡器随时间的对准变化,并且监测和动态控制主振荡器的可量化对准误差,以例如向duv光刻设备提供高度相干的光束。
68.图2至图4示出了根据各种示例性实施例的光源设备200。图2是根据示例性实施例的光源设备200的示意性俯视图。图3和图4是根据示例性实施例的图2所示的光源设备200的气体放电级220的示意性局部截面图。
69.图2示出了根据各种示例性实施例的光源设备200。光源设备200可以被配置为监测和动态控制气体放电级220(例如,mo)的可量化对准误差,并且例如向duv光刻设备(例如,la)提供高度相干和对准的射束(例如,射束202、放大射束204)。光源设备200可以进一步被配置为减少气体放电级220(例如,mo)的对准时间,并且减少气体放电级220(例如,mo)
随时间的对准变化。尽管光源设备200在图2中示出为独立的设备和/或系统,但是本公开的实施例可以与其他光学系统一起使用,诸如但不限于辐射源so、光刻设备la和/或其他光学系统。在一些实施例中,光源设备200可以是光刻设备la中的辐射源so。例如,duv辐射束b可以是射束202和/或放大射束204。
70.光源设备200可以是由气体放电级220(例如,mo)和功率环放大器(pra)级280(例如,pa)形成的mopa。光源设备200可以包括气体放电级220、线分析模块(lam)230、主振荡器波前工程盒(moweb)240、功率环放大器(pra)级280和控制器290。在一些实施例中,所有上述组件都可以容纳在三维(3d)框架210中。在一些实施例中,3d框架210可以包括金属(例如,铝、钢等)、陶瓷和/或任何其他合适的刚性材料。
71.气体放电级220可以被配置为输出高度相干的射束(例如,射束202)。气体放电级220可以包括第一光学谐振器元件254、第二光学谐振器元件224、输入/输出光学元件250(例如,oc)、光学放大器260和光谱特征调节器270(例如,lnm)。在一些实施例中,输入/输出光学元件250可以包括第一光学谐振器元件254,并且光谱特征调节器270可以包括第二光学谐振器元件224。第一光学谐振器228可以由输入/输出光元件250(例如,经由第一光学谐振器元件254)和光谱特征调节器270(例如,经由第二光学谐振器元件224)限定。第一光学谐振器元件254可以是部分反射的(例如,部分反射镜),并且第二光学谐振器元件224可以是反射的(如,反射镜或光栅),以形成第一光学谐振器228。第一光学谐振器228可以将由光学放大器260生成的光(例如,放大自发发射(ase)201)引导到光学放大器260中固定次数以形成射束202。在一些实施例中,如图2所示,气体放电级220可以将射束202输出到pra级280,作为mopa布置的一部分。
72.pra级280可以被配置为通过多通道布置(multi-pass arrangement)放大来自气体放电级220的射束202,并且输出放大射束204。pra级280可以包括第三光学谐振器元件282、功率环放大器(pra)286和第四光学谐振器元件284。第二光学谐振器288可以由第三光学谐振器元件282和第四光学谐振器元件284限定。第三光学谐振器元件282可以是部分反射的(例如,部分分束器),并且第四光学谐振器元件284可以是反射的(如,反射镜或棱镜或射束反向器),以形成第二光学谐振器288。第二光学谐振器282可以将射束202从气体放电级220引导到pra 286中固定次数以形成放大射束204。在一些实施例中,pra级280可以将放大射束204输出到光刻设备,例如光刻设备(la)。例如,放大射束204可以是来自光刻设备la中的辐射源so的euv和/或duv辐射束b。
73.如图2-图4,光学放大器260可以光学耦合到输入/输出光学元件250和光谱特征调节器270。光学放大器260可以被配置为输出ase 201和/或射束202。在一些实施例中,光学放大器260可以利用ase 201作为信标来引导腔室261的光轴和/或气体放电级220(例如,mo腔)的光轴的对准。光学放大器260可以包括腔室261、气体放电介质263和腔室调节器265。气体放电介质263可以设置在腔室261内,并且腔室261可以设置在腔室调节器265上。
74.腔室261可以被配置为将气体放电介质263保持在第一腔室光学端口262a和第二腔室光学端口262b内。腔室261可以包括第一腔室光学端口262a和与第一腔室光学端口262a相对的第二腔室光学端口262。在一些实施例中,第一腔室光学端口262a和第二腔室光学端口262b可以形成腔室261的光轴。
75.如图3所示,第一腔室光学端口262a可以与输入/输出光学元件250光学通信。第一
腔室光学端口262a可以包括第一腔室壁261a、第一腔室窗口266a和第一腔室孔264a。在一些实施例中,如图3所示,第一腔室孔264a可以是矩形开口。
76.如图4所示,第二腔室光学端口262b可以与光谱特征调节器270光学通信。第二腔室光学端口262b可以包括第二腔室壁261b、第二腔室窗口266b和第二腔室孔264b。在一些实施例中,如图4所示,第二腔室孔264b可以是矩形开口。在一些实施例中,腔室261的光轴穿过第一腔室孔264a和第二腔室孔264b。
77.气体放电介质263可以被配置为输出ase 201(例如,193nm)和/或射束202(例如,193nm)。在一些实施例中,气体放电介质263可以包括用于准分子激光的气体(例如,ar2、kr2、f2、xe2、arf、krcl、krf、xebr、xecl、xef等)。例如,气体放电介质263可以包括arf或krf,并且在从腔室261中的周围电极(未示出)激发(例如,施加的电压)时,通过第一腔室光学端口262a和第二腔室光学端口262b输出ase 201(例如,193nm)和/或射束202(例如,193nm)。在一些实施例中,气体放电级220可以包括电压电源(未示出),该电压电源被配置为跨腔室261中的电极(未示出)施加高压电脉冲。
78.腔室调节器265可以被配置为在空间上调节(例如,横向地、角度地等)腔室261的光轴(例如,沿着第一腔室光学端口262a和第二腔室光学端口262b)。如图2所示,腔室调节器265可以耦合到腔室261以及第一腔室光学端口262a和第二腔室光学端口262b。在一些实施例中,腔室调节器265可以具有六个自由度(例如,六个轴)。例如,腔室调节器265可以包括一个或多个线性电机和/或致动器,以便以六个自由度(例如,前/后、上/下、左/右、偏航、俯仰、侧倾)调节腔室261的光轴。在一些实施例中,腔室调节器265可以横向地和角度地调节腔室261,以使腔室261的光轴(例如,沿着第一腔室光学端口262a和第二腔室光学端口262b)与气体放电级220(例如,mo腔)的光轴对准。例如,如图2所示,气体放电级220(例如,mo腔)的光轴可以由腔室261的光轴(例如,沿着第一腔室光学端口262a和第二腔室光学端口262b)、输入/输出光学元件250(例如,oc孔252)和光谱特征调节器270(例如,lnm孔272)限定。
79.输入/输出光学元件250可以被配置为与第一腔室光学端口262a光学通信。在一些实施例中,输入/输出光学元件250可以是被配置为部分反射射束并且形成第一光学谐振器228的光学耦合器(oc)。例如,oc先前已经在于2011年2月8日发布的美国专利no.7,885,309中进行了描述,该专利通过引用整体并入本文。如图2所示,输入/输出光学元件250可以包括第一光学谐振器元件254,第一光学谐振器元件254用于将光引导(例如,反射)到光学放大器260中并且将光(例如,射束202、ase 201)从光学放大器260透射到气体放电级220(例如,mo腔)之外。
80.如图3所示,输入/输出光学元件250可以包括oc孔252和第一光学谐振器元件254。第一光学谐振器元件254可以被配置为相对于腔室261(例如,第一腔室光学端口262a)在竖直和/或水平方向上被角度调节(例如,侧倾和/或倾斜)通过oc孔252的光。在一些实施例中,oc孔252可以是矩形开口。在一些实施例中,气体放电级220的对准可以基于第一腔室孔264a和oc孔252的对准。在一些实施例中,第一光学谐振器元件254可以角度地调节(例如,侧倾和/或倾斜)输入/输出光学元件250,使得来自输入/输出光学元件250的反射平行于气体放电级220(例如,mo腔)的光轴。在一些实施例中,第一光学谐振器元件254可以是能够进行角度调节(例如,侧倾和/或倾斜)的可调节反射镜(例如,部分反射器、分束器等)。在一些
实施例中,oc孔252可以是固定的,并且第一光学谐振器元件254可以被调节。在一些实施例中,oc孔252可以被调节。例如,oc孔252可以相对于室261在竖直和/或水平方向上被空间调节。
81.光谱特征调节器270(例如,lnm)可以被配置为与第二腔室光学端口262b进行光学通信。在一些实施例中,光谱特征调节器270可以是被配置为向射束提供光谱线变窄的线变窄模块(lnm)。例如,lnm之前已经在于2012年2月28日发布的美国专利no.8,126,027中进行了描述,该申请通过引用整体并入本文。
82.如图2所示,光谱特征调节器270可以包括第二光学谐振器元件224,第二光学谐振器元件224用于将光(例如,射束202、ase 201)从光学放大器260朝向输入/输出光学元件250引导(例如,反射)回光学放大器260。
83.如图4所示,光谱特征调节器270可以包括lnm孔272和倾斜角度调制器(tam)274。tam 274可以被配置为相对于腔室261(例如,第二腔室光学端口262b)在竖直和/或水平方向上对通过lnm孔270的光进行角度调节。在一些实施例中,lnm孔272可以是矩形开口。在一些实施例中,气体放电级220的对准可以基于第二腔室孔264b和lnm孔272的对准。在一些实施例中,tam 274可以角度地调节(例如,侧倾和/或倾斜)光谱特征调节器270,使得来自光谱特征调节器270的反射平行于气体放电级200的光轴(例如,mo腔)。在一些实施例中,tam 274可以包括能够进行角度调节(例如,侧倾和/或倾斜)的可调节反射镜(例如,部分反射器、分束器等)和/或可调节棱镜。在一些实施例中,lnm孔272可以是固定的,并且tam274可以被调节。在一些实施例中,lnm孔272可以被调节。例如,lnm孔272可以相对于腔室261在竖直和/或水平方向上被空间调节。
84.在一些实施例中,tam 274的可调节反射镜(例如,部分反射器、分束器等)和/或可调节棱镜可以包括多个棱镜276a-d。棱镜276a-d可以被致动以操纵入射光在第二光学谐振器元件224上的入射角,该入射角可以用于选择窄带波长以沿着光路反射回来。在一些实施例中,棱镜276a可以装配有具有有限步长分辨率的步进电机,并且可以用于粗略波长控制。棱镜276b可以使用压电换能器(pzt)致动器来致动,与棱镜276a相比,压电换能器提供改进的分辨率和带宽。在操作中,控制器290可以以双级配置使用棱镜276a、276b。
85.lam 230可以被配置为监测射束(例如,射束202、成像光206)的线中心(例如,中心波长)。lam 230还可以被配置为监测射束(例如,ase 201、射束202、成像光206)的能量以用于量测波长测量。例如,lam先前已经在于2011年2月8日发布的美国专利no.7,885,309中进行了描述,该申请通过引用整体并入本文。
86.如图2所示,lam 230可以光学耦合到气体放电级220和/或moweb 240。在一些实施例中,lam 230可以设置在气体放电级220与moweb 240之间。例如,如图2所示,lam 230可以直接光学耦合到moweb 240,并且光学耦合到气体放电级220。在一些实施例中,如图2所示,分束器212可以被配置为将ase 201和/或射束202引向pra级280,并且将ase 201或射束202引向成像设备。在一些实施例中,如图2所示,分束器212可以设置在moweb 240中。
87.moweb 240可以被配置为为射束(例如,射束202、成像光206)提供射束整形。moweb 240可以进一步被配置为监测射束(例如,ase 201、射束202、成像光206)的向前和/或向后传播。例如,moweb先前已经在于2011年2月8日发布的美国专利no.7,885,309中进行了描述,该申请通过引用整体并入本文。如图2所示,moweb 240可以光学耦合到lam 230。在一些
实施例中,lam 230、moweb 240和/或成像设备可以经由单个光学布置光学耦合到气体放电级220。
88.控制器290可以被配置为与输入/输出光学元件250、腔室调节器265和/或光谱特征调节器270通信。在一些实施例中,控制器290可以被配置为向输入/输出光元件250提供第一信号292,向光谱特征调节器270提供第二信号294,向腔室调节器265提供第三信号296。在一些实施例中,控制器290可以被配置为向输入/输出光学元件250和/或光谱特征调节器270提供信号(例如,第一信号292和/或第二信号294)并且基于来自成像设备400的输出(例如,二维(2d)图像比较)调节输入/输出光学元件250(例如,调节第一光学谐振器元件254)和/或光谱特征调节器270(例如,调节tam 274)。
89.在一些实施例中,第一光学谐振器元件254、腔室调节器265和/或tam 274可以与控制器290进行物理和/或电子通信(例如,第一信号292、第二信号294和/或第三信号296)。例如,第一光学谐振器元件254、腔室调节器265和/或tam 274可以由控制器290调节(例如,横向地和/或角度地),以使腔室261的光轴(例如,沿着第一腔室光学端口262a和第二腔室光学端口262b)与由输入/输出光学元件250(例如,oc孔252)和光谱特征调节器270(例如,lnm孔272)限定的气体放电级220(例如,mo腔)的光轴对准。
90.在正常操作期间,当光学器件经历热瞬变时和当激光占空比变化时,激光波长可能会受到干扰和漂移。主波长致动器是lnm。如上所述,lnm可以包括多个棱镜276a-d和第二光学谐振器元件224(例如,光栅)。多个棱镜276a-d可以被致动以操纵入射光在第二光学谐振器元件224上的入射角,该入射角用于选择窄带波长以沿着光路反射回来。在一些实施例中,入射角的大小可以控制所选择的波长。
91.在一些实施例中,为了控制入射角的大小以及因此控制所选择的波长,可以使用多个棱镜276a-d来调节最终入射角。例如,棱镜276a可以与棱镜276b相比对最终入射角具有更多的控制。也就是说,在一些实施例中,控制器290以双级配置使用棱镜276a、276b,其中棱镜276a用于大跳跃并且使棱镜276b去饱和,棱镜276b用于对最终入射角进行更精细的改变。控制棱镜276a、276b对于mfi操作尤其重要,mfi操作需要的不仅仅是围绕设定点的调节,而是除了精确控制正弦曲线的中心点(即,中心波长)之外,还需要精确跟踪尼奎斯特频率下的正弦曲线。参考图5、图6a、图6b和图7-图9描述的过程提供了用于控制成像操作(诸如mfi操作)的中心波长的方法。
92.多焦点成像操作可以包括双色模式。以双色模式操作光源可以包括:使用第一激光室模块生成第一波长的第一激光辐射束;使用第二激光室模块生成第二波长的第二激光辐射束;以及使用射束组合器沿着公共输出射束路径组合第一激光辐射和第二激光辐射。在双色模式下,波长目标可以在突发内在两个已知设定点之间交替(例如,每个脉冲),并且pzt可以用于跟踪快速变化的目标,该目标几乎没有余量来控制中心波长。
93.图5示出了根据一个实施例的用于调节多焦点或其他成像的中心波长的方法500。应当理解,执行本文中提供的公开并非需要图5中的所有步骤。此外,一些步骤可以同时、顺序地和/或以与图5所示的不同的顺序执行。将参考图1-图4描述方法500。然而,方法500不限于这些示例实施例。
94.在一些实施例中,方法500涉及制定反馈回路,以通过移动致动器以分别基于从lam 230估计的平均中心波长误差来控制棱镜276a和276b的移动,从而调节激光辐射束的
中心波长。为了实现这一点,可以使用lam数据来估计最近的脉冲的中心波长。在一些实施例中,可以向控制器290提供目标中心波长与估计中心波长之间的差,以确定棱镜276b的期望致动,以补偿中心波长上的干扰。由于棱镜276b具有有限的行进范围,控制器290还可以根据需要通过致动棱镜276b来确保棱镜276b居中。
95.在510,方法500可以包括估计中心波长误差。例如,可以基于奇数突发的中心波长的第一平均值和偶数突发的中心波长的第二平均值来估计中心波长误差,并且基于第一平均值和第二平均值来确定第三平均值。在一些实施例中,中心波长误差可以基于中心波长与第三平均值之间的差。
96.在520,方法500可以包括基于估计中心波长确定控制棱镜276b的移动的第一致动器的致动量。例如,图2的控制器290可以确定目标中心波长与估计波长之间的差,并且确定致动控制棱镜276b移动的致动器以补偿该差的量。在530,方法500可以包括基于致动量来致动控制棱镜276b的移动的致动器。
97.在540,方法500可以包括确定棱镜276b是否偏离中心。响应于确定棱镜276b居中,方法500在550结束。响应于确定棱镜276b偏离中心,在560,方法500可以包括确定控制棱镜276b的移动的致动器的第二致动量,以及基于第一致动器的第二致动确定控制棱柱276a的移动的第二致动器的第三致动量。也就是说,控制器290可以确定两个棱镜276a、276b需要多少致动来弥补中心波长误差。
98.图6a-图6b、图7和图8示出了根据一些实施例的用于调节诸如多焦点成像等成像操作的中心波长的方法。应当理解。执行本文中提供的公开并非需要图6-图8中的所有步骤。此外,一些步骤可以同时、顺序地和/或以与图6a-图6b、图7和图8所示的不同的顺序执行。将参考图1-图4描述这些方法。然而,这些方法不限于这些示例实施例。
99.图6a-图6b、图7和图8涉及用于调节诸如双色mfi模式下的激光辐射束的中心波长的方法。双色mfi模式可能会遇到挑战,诸如棱镜276b在双色模式下对于中心波长控制具有很小的余量、来自模式转变的阶跃干扰和/或峰值分离变化如果使用纯反馈来处理则会导致瞬变,并且中心波长控制器可能与(多个)其他控制器(例如,峰值分离控制器)相互作用,这会导致性能下降或甚至不稳定。为了解决这些挑战,在一些实施例中,棱镜276a可以在突发内移动以补偿大的中心波长误差,同时限制棱镜276b的移动以补偿小的低通滤波误差。此外,在一些实施例中,棱镜276a可以被移动以使棱镜276b去饱和。在一些实施例中,当检测到双色模式转变或峰值分离目标变化时,棱镜276a可以移动到突发之外。在一些实施例中,中心波长控制器与其他控制器(例如,峰值分离控制器)之间的控制带宽可以彼此分离。
100.如图6a-图6b所示,在610,方法600可以包括激发光源,诸如mfi系统中的激光室。在620,方法600可以包括确定光源的波长误差,其可以是来自第一激光室模块的第一波长的第一激光辐射束,或者是使用第二激光室模块生成的第二波长的第二激光辐射束。在一些实施例中,确定波长误差可以包括测量由光源生成的射束的中心波长,并且确定中心波长与目标中心波长之间的差。
101.在630,方法600可以包括确定波长误差是否大于第一阈值。例如,阈值可以是200毫微微米。本领域普通技术人员应当理解,这仅仅是示例阈值,并且根据本公开的方面,还可以考虑其他阈值。
102.在一些实施例中,在640,响应于确定波长误差大于阈值,方法600可以包括移动用
于控制棱镜276a的移动的第一致动器。例如,当诸如低通滤波器等滤波器和用于控制棱镜276b的移动的第二致动器的移动被禁用时,第一致动器可以每个脉冲被移动第一步长。例如,第一致动器可以在减小波长误差的方向上移动。第一步长可以是固定步长,诸如第一致动器的一个完整步长。通过在滤波器和第二致动器被禁用的同时移动第一致动器,方法600提供波长误差的总体变化并且使棱镜276b去饱和。在一些实施例中,在第一致动器被移动第一步长之后,在698,方法600以等待光源的下一脉冲结束。
103.在一些实施例中,在650,响应于确定波长误差小于第一阈值,方法600可以包括确定平均波长误差。在一些实施例中,平均波长误差可以是基于低通滤波技术的移动平均值,如本领域普通技术人员应当理解的。在660,方法600可以包括确定平均波长误差是否大于第二阈值。在一些实施例中,第二阈值可以不同于第一阈值。例如,第二阈值可以是100毫微微米。本领域普通技术人员应当理解,这仅仅是示例阈值,并且根据本公开的方面,还可以考虑其他阈值。在一些实施例中,平均波长误差可以基于波长误差和n个脉冲之上的多个波长误差的平均值,其中n是大于一(1)的脉冲数。也就是说,平均波长误差可以是波长误差的移动平均值。
104.在一些实施例中,在670,响应于确定平均波长误差大于第二阈值,方法600可以包括以第二步长移动第一致动器,启用低通滤波器,并且禁用第二致动器的移动。例如,第一致动器可以在减小波长误差的方向上移动。在一些实施例中,第二步长可以与波长误差成比例,例如,平均波长误差越小,第一致动器的步长越小,反之亦然。在一些实施例中,第二步长可以小于完整步长。在一些实施例中,第二步长可以大于完整步长。通过将第一致动器移动与平均波长误差成比例的步长,方法600防止棱镜276a的期望位置过冲。在一些实施例中,在第一致动器移动第二步长之后,在698,方法600以等待光源的下一脉冲结束。
105.在一些实施例中,在680,响应于确定平均波长误差小于第二阈值,方法600可以包括以第三步长移动第一致动器。在一些实施例中,第三步长可以与施加到第二致动器的电压成比例,并且重置施加到第二致动器的电压。因此,在一些实施例中,第三步长可以基于施加到第二致动器的电压,而不是平均波长误差。
106.在一些实施例中,在690,方法600可以包括确定脉冲的发射次数是否是更新间隔的倍数。例如,发射次数可以是射束脉冲的数目。在一些实施例中,更新间隔可以是例如每五(5)个或十(10)个脉冲。本领域普通技术人员应当理解,这些仅仅是示例更新间隔,并且根据本公开的方面,还可以考虑其他更新间隔。也就是说,在一些实施例中,方法600可以包括确定脉冲是例如第五脉冲还是第十脉冲。在一些实施例中,当发射次数不等于更新间隔时,在698,方法600以等待光源的下一脉冲结束。
107.在一些实施例中,当发射次数等于更新间隔时,在695,方法600可以包括更新施加到第二致动器的电压。例如,施加到第二致动器的电压可以基于平均波长误差,使得棱镜276b的移动适应后续脉冲中的平均波长误差。在一些实施例中,在更新施加到第二致动器的电压之后,在698,方法600以等待光源的下一脉冲结束。
108.在一些实施例中,图7的方法700可以在光源的脉冲之间执行。在此期间,光源可以在操作模式之间转变,例如,在单色模式与双色模式之间,结果,中心波长可以由于操作状态的变化而变化。为了解决这一问题,如图7所示,方法700还可以包括在710检测光源的操作状态的变化。在720,响应于检测到光源的操作状态的变化,方法700可以包括确定中心波
长变化。例如,确定中心波长变化可以包括确定目标峰值分离的中点。在730,方法700可以包括基于中心波长变化将第一致动器移动步长。在一些实施例中,关于图7描述的过程可以在光源的突发之间执行。通过这样做,方法700减少了在下次光源被激活时的波长误差。
109.在一些实施例中,图8的方法800可以在光源的脉冲之间执行。在此期间,目标峰值分离可能会改变。为了解决这一问题,如图8所示,方法800可以包括在810检测峰值分离的变化。在820,响应于检测到峰值分离的变化,方法800还可以包括确定中心波长变化。例如,确定中心波长变化可以包括确定先前峰值分离目标与新峰值分离目标之间的平均值。在830,方法800可以包括基于中心波长变化将第一致动器移动步长。在一些实施例中。关于图7和图8描述的过程可以在光源的突发之间执行。通过这样做,方法700和800减少了在下次光源被激活时的波长误差。此外,使用图7和图8中描述的过程,本公开减少了完成不同操作模式之间的转变所需要的突发的数目。
110.图9示出了根据一个实施例的用于调节诸如可以用于多焦点成像的中心波长的方法900。应当理解,执行本文中提供的公开并非需要图9中的所有步骤。此外,一些步骤可以同时、顺序地和/或以与图9所示的不同的顺序执行。将参考图1-图4描述方法900。然而,方法900不限于这些示例实施例。
111.在一些实施例中,关于图9讨论的过程提供了在突发期间移动控制棱镜276b移动的致动器。也就是说,关于图9讨论的过程提供了一种用于解决中心波长变化的突发间(instar-burst)解决方案,诸如可以是来自第一激光室模块的第一波长的第一激光辐射束,或者是在mfi模式下使用第二激光室模块生成的第二波长的第二激光辐射束。为了实现这一点,在一些实施例中,关于图9描述的过程估计中心波长的漂移速率,以便补偿中心波长的测量延迟。
112.在一些实施例中,抖动波形(或序列)可以与用于移动棱镜276b的致动器的偏移相结合。例如,抖动波形可以是用于随机化量化的噪声的应用形式。偏移可以在突发结束(eob)时和/或以设置的脉冲间隔进行更新。在一些实施例中,eob更新可以移动棱镜276b的致动器,以将通过对整个突发的波长测量进行平均而获取的估计的中心波长漂移归零。在一些实施例中,间隔更新可以基于本文中描述的估计过程。在一些实施例中,本文中描述的估计过程可以基于直到当前脉冲的中心波长的滚动平均估计,并且可以提供对棱镜276b的致动器的偏移和棱镜276a的致动器的第二偏移两者的访问。换言之,在一些实施例中,用于估计漂移速率的过程可以基于棱镜276a、276b的当前位置、以及每个致动器的相应偏移、和中心波长的滚动平均值,并且使用卡尔曼滤波器框架估计总累积中心波长漂移。在一些实施例中,为了补偿lam 230的延迟,可以通过将卡尔曼滤波器转换为卡尔曼预测器来预测两个发射之前的漂移。也就是说,通过使用已知的输入和任何干扰,可以使用开环传播来估计漂移速率,以在电流突发之前两步预测漂移速率。
113.在一些实施例中,卡尔曼滤波器可以使用等式1和2来建模。在一些实施例中,在任何给定点,相对于中心波长目标的中心波长可以基于棱镜276a、276b的位置之和(通过适当的增益进行缩放)、以及在时间k处的累积波长漂移d(k)。在一些实施例中,累积波长漂移可以被建模为在定义为dsr(k)的时间k处具有未知速率的线性漂移。结果,漂移速率可以随时间变化而没有问题,并且可以被合并到状态向量中,从而允许估计漂移速率。
[0114][0115][0116]
利用如此构造的模型,稳态卡尔曼滤波器可以如等式3中那样实现,其中a、b、c和d在等式1和2中定义,q和r是调谐参数,s是等式4中给出的代数ricatti等式的解。
[0117][0118]
as sa
t-sc
t
r-1
cs q=0
[0119]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0120]
在一些实施例中,控制器(例如,控制器290)可以被提供有总累积漂移和估计的漂移速率,使得中心波长的变化可以得到补偿。
[0121]
在一些实施例中,偏移p3
offset
可以使用等式5来定义。通过使用已知输入和并入模型中的任何干扰,漂移速率可以使用两步之前的模型的开环传播来估计。
[0122][0123]
基于上述内容,漂移速率可以实时地基于波长测量来估计。漂移速率可以用于预测波长漂移的大小并且对其进行逐点补偿。在一些实施例中,漂移速率可以被建模为具有可变累积速率的累加器,并且卡尔曼滤波器可以用于基于中心波长的估计(例如,当前突发中所有波长测量的算术平均值)来估计累积速率。在一些实施例中,为了补偿lam 230中的(多个)测量延迟,可以预测前方的中心波长n个脉冲(例如,两个脉冲),并且将其用于确定施加到棱镜276b的致动器的偏移。例如,在一些实施例中,n个脉冲可以是两个脉冲,但是本领域普通技术人员应当理解,这仅仅是示例脉冲数目,并且根据本公开的方面,可以设想更多或更少的脉冲。在一些实施例中,该偏移可以以亚毫微微米分辨率逐发射被更新。
[0124]
在910,方法900可以包括将抖动波形与用于致动棱镜的偏移值相结合。在一些实施例中,偏移值可以用于移动用于控制棱镜276b的移动的致动器。在一些实施例中,偏移值基于施加到用于控制棱镜276b的移动的致动器的直流(dc)电压。在一些实施例中,dc电压的初始值为零伏。
[0125]
在920,方法900可以包括基于抖动波形和偏移值生成脉冲间波长。例如,脉冲间波长可以使用lam 230生成。在一些实施例中,脉冲间波长也可以基于来自光刻设备la内的其他干扰。
[0126]
在930,方法900可以包括基于多个脉冲的脉冲间波长生成中心波长的滚动平均值。在一些实施例中,多个脉冲的脉冲间波长包括当前脉冲的波长。
[0127]
在940,方法900可以包括估计漂移速率以预测未来脉冲的中心波长。在一些实施
例中,用于移动与棱镜276b相关联的致动器的偏移值可以是第一偏移值,并且估计漂移速率可以包括基于中心波长的滚动平均值、第一偏移值、和移动控制第二棱镜276a的移动的第二致动器的第二偏移值来估计漂移速率。在一些实施例中,估计漂移速率包括使用卡尔曼滤波器框架来估计累积的中心波长漂移速率。例如,卡尔曼滤波器框架可以基于中心波长的滚动平均值、第一偏移值和第二偏移值来估计累积的中心波长漂移速率。此外,估计漂移速率可以包括在当前脉冲之前n个脉冲(例如,两个脉冲)预测中心波长。为了实现这一点,卡尔曼滤波器框架可以被转换为卡尔曼预测器,以在当前脉冲之前n个脉冲(例如,两个脉冲)预测中心波长。
[0128]
在950,方法900可以包括基于所估计的漂移速率更新偏移值。在一些实施例中,除了所估计的漂移速率之外,更新偏移值还可以基于突发结束时中心波长的滚动平均值。
[0129]
示例计算机系统
[0130]
其中的各种实施例和组件可以例如使用一个或多个公知计算机系统来实现,例如,图中所示或以其他方式讨论的示例实施例、系统和/或设备。计算机系统1000可以是能够执行本文中描述的功能的任何公知计算机。
[0131]
计算机系统1000包括一个或多个处理器(也称为中央处理单元或cpu),诸如处理器1004。处理器1004连接到通信基础设施或总线1006。
[0132]
一个或多个处理器1004每个可以是图形处理单元(gpu)。在一个实施例中,gpu是处理器,该处理器被设计为处理数学密集型应用的专用电子电路。gpu可以具有并行结构,该并行结构对于诸如计算机图形应用、图像、视频等常见的数学密集型数据等大数据块的并行处理是高效的。
[0133]
计算机系统1000还包括通过(多个)用户输入/输出接口1002与通信基础设施1006通信的(多个)用户输入/输入设备1003,诸如显示器、键盘、定点设备等。
[0134]
计算机系统1000还包括主(main)存储器或初级(primary)存储器1008,诸如随机存取存储器(ram)。主存储器1008可以包括一个或多个级别的高速缓存。主存储器1008中存储有控制逻辑(即,计算机软件)和/或数据。
[0135]
计算机系统1000还可以包括一个或多个辅存储设备或存储器1010。辅存储器1010可以包括例如硬盘驱动器1012和/或可移动存储设备或驱动器1014。可移动存储设备1014可以是闪存驱动、磁带驱动、光盘驱动、光学存储设备、磁带备份设备、和/或任何其他存储设备/驱动器。
[0136]
可移动存储驱动器1014可以与可移动存储单元1018交互。可移动存储设备1018包括其上存储有计算机软件(控制逻辑)和/或数据的计算机可用或可读存储设备。可移动存储单元1018可以是软盘、磁带、压缩盘、dvd、光存储盘和/或任何其他计算机数据存储设备。可移动存储驱动器1014以公知方式从可移动存储单元1018读取和/或向其写入。
[0137]
根据示例实施例,辅存储器1010可以包括用于允许计算机系统1000访问计算机程序和/或其他指令和/或数据的其他装置、工具或其他方法。这样的装置、工具和其他方法可以包括例如可移动存储单元1022和接口1020。可移动存储单元1022和接口1020的示例可以包括程序盒和盒接口(诸如在视频游戏设备中找到的)、可移动存储器芯片(诸如eprom或prom)和相关的插座、记忆棒和usb端口、存储卡和相关的存储卡插槽、和/或任何其他可移动存储模块和相关接口。
[0138]
计算机系统1000还可以包括通信或网络接口1024。通信接口1024使得计算机系统1000能够与远程设备、远程网络、远程实体等的任何组合(单独和共同由附图标记1028引用)进行通信和交互。例如,通信接口1024可以允许计算机系统1000通过通信路径1026与远程设备1028通信,通信路径1026可以是有线的和/或无线的,并且可以包括lan、wan、互联网等的任何组合。控制逻辑和/或数据可以经由通信路径1026传输到计算机系统1000和从其传输。
[0139]
在一个实施例中,包括其上存储有控制逻辑(软件)的非暂态有形计算机可用或可读介质的非暂态有形设备或制品在本文中也称为计算机程序产品或程序存储设备。这包括但不限于计算机系统1000、主存储器1008、辅存储器1010、可移动存储单元1018和1022、以及体现上述各项的任何组合的有形制品。当由一个或多个数据处理设备(诸如计算机系统1000)执行时,这样的控制逻辑使得这样的数据处理设备如本文所述进行操作。
[0140]
基于本公开中包括的教导,相关领域的技术人员将清楚如何使用图10所示以外的数据处理设备、计算机系统和/或计算机架构来制作和使用本公开的实施例。具体地,实施例可以与本文中描述的那些以外的其他软件、硬件和/或操作系统实现一起操作。
[0141]
尽管上文可以已经具体参考了在光学光刻的上下文中使用实施例,但应当理解,实施例可以用于其他应用,例如压印光刻,并且在上下文允许的情况下,不限于光学光刻。在压印光刻中,图案化装置中的形貌定义了在衬底上创建的图案。图案化装置的形貌可以被压入提供给衬底的抗蚀剂层中,然后通过施加电磁辐射、热、压力或其组合来固化抗蚀剂。在抗蚀剂固化之后,将图案化装置移出抗蚀剂,以在其中留下图案。
[0142]
应当理解,本文中的措辞或术语是出于描述而非限制的目的,因此本说明书的术语或短语将由相关领域的技术人员根据本文中的教导进行解释。
[0143]
本文中使用的术语“衬底”描述了其上添加有材料层的材料。在一些实施例中,衬底本身可以被图案化,并且添加在其上的材料也可以被图化,或者可以保留而不图案化。
[0144]
以下示例是本公开的实施例的说明性但非限制性示例。对本领域中通常遇到的各种条件和参数的其他合适的修改和适应(这些对于相关领域的技术人员来说是很清楚的)在本公开的精神和范围内。
[0145]
尽管本文中可以具体提及了该设备和/或系统在ic制造中的使用,但应当明确理解,这样的设备和/或系统具有很多其他可能的应用。例如,它可以用于制造集成光学系统、磁畴存储器的引导和检测图案、lcd面板、薄膜磁头等。技术人员应当理解,在这样的替代应用的上下文中,本文中对术语“掩模版”、“晶片”或“管芯”的任何使用应当分别被替换为更一般的术语“掩模”、“衬底”和“目标部分”。
[0146]
虽然上面已经描述了具体实施例,但是可以理解,实施例可以以不同于所描述的方式进行实践。说明书不旨在限制权利要求的范围。
[0147]
应当理解,“具体实施方式”部分而不是“发明内容”和“摘要”部分旨在用于解释权利要求。“发明内容”和“摘要”部分可以阐述发明人所设想的一个或多个但不是所有示例性实施例,并且因此不旨在以任何方式限制实施例和所附权利要求。
[0148]
上述实施例借助于说明特定功能及其关系的实现的功能构建块进行了描述。为了便于描述,这些功能构建块的边界在本文中被任意限定。只要指定的功能及其关系被适当地执行,就可以定义替代边界。
[0149]
具体实施例的上述描述将如此充分地揭示实施例的一般性质,使得其他人可以通过应用本领域技术人员的知识容易地修改和/或适应各种应用,而无需过度实验,而不偏离实施例的总体概念。因此,基于本文中呈现的教导和指导,这样的适应和修改旨在在所公开的实施例的等价物的含义和范围内。
[0150]
本发明的其他方面在以下编号条款中列出。
[0151]
1.一种用于控制成像操作的中心波长的方法,包括:
[0152]
估计中心波长误差;
[0153]
基于所估计的中心波长误差确定控制第一棱镜的移动的第一致动器的第一致动量;
[0154]
基于所述第一致动量致动所述第一致动器;
[0155]
确定所述第一棱镜是否偏离中心;
[0156]
响应于确定所述第一棱镜偏离中心,确定所述第一致动器的第二致动量并且确定用于控制第二棱镜的移动的第二致动器的第三致动量;以及
[0157]
分别基于所述第二致动量和所述第三致动量致动所述第一致动器和所述第二致动器。
[0158]
2.根据条款1所述的方法,其中所述估计所述中心波长误差包括:
[0159]
计算奇数突发处的中心波长的第一平均值和偶数突发处的所述中心波长的第二平均值;以及
[0160]
确定所述第一平均值和所述第二平均值的平均值,其中所述中心波长误差基于所述第一平均值和所述第二平均值的所述平均值。
[0161]
3.根据条款1所述的方法,其中所述确定所述第一致动量包括:
[0162]
确定目标中心波长与估计中心波长之间的差;以及
[0163]
基于所述目标中心波长与所述估计中心波长之间的所述差来确定所述第一致动量。
[0164]
4.根据条款3所述的方法,其中所述确定所述目标中心波长与所述估计中心波长之间的所述差包括使用数字滤波器确定所述差。
[0165]
5.根据条款1所述的方法,其中所述确定所述第二致动器的所述第三致动量基于在基于所述第二致动量致动所述第一致动器之后所述第一棱镜的位置。
[0166]
6.根据条款5所述的方法,其中所述确定所述第三致动量还包括确定所述第三致动量以减小所述目标中心波长与所述估计波长之间的所述差。
[0167]
7.根据条款1所述的方法,其中所述成像操作包括多焦点成像操作,并且所述方法还包括以双色模式操作光源,其中以所述双色模式操作所述光源包括:
[0168]
使用第一激光室模块生成第一波长的第一激光辐射束;
[0169]
使用第二激光室模块生成第二波长的第二激光辐射束;以及
[0170]
使用射束组合器沿着公共输出射束路径组合所述第一激光辐射和所述第二激光辐射,
[0171]
其中所述估计中心波长误差包括估计所述第一激光辐射束的中心波长误差。
[0172]
8.一种用于控制中心波长的方法,包括:
[0173]
确定由光源生成的射束的波长误差;
[0174]
确定所述波长误差是否大于第一阈值;
[0175]
响应于确定所述波长误差大于所述第一阈值,将第一致动器移动第一步长,所述第一致动器被配置为控制第一棱镜的移动;
[0176]
响应于确定所述波长误差小于所述第一阈值:
[0177]
确定平均波长误差;
[0178]
确定所述平均波长误差是否大于不同于所述第一阈值的第二阈值;
[0179]
响应于确定所述平均波长误差大于所述第二阈值,将所述第一致动器移动第二步长并且启用低通滤波器;以及
[0180]
响应于确定所述平均波长误差小于所述第二阈值,启用所述低通滤波器,更新施加到第二致动器的电压,并且将所述第一致动器移动第三步长,所述第二致动器被配置为控制第二棱镜的移动。
[0181]
9.根据条款8所述的方法,其中所述确定所述波长误差包括:
[0182]
测量由所述光源生成的所述射束的中心波长;以及
[0183]
确定所述中心波长与目标中心波长之间的差。
[0184]
10.根据条款8所述的方法,还包括:
[0185]
确定所述光源的脉冲的发射次数是否是更新间隔的倍数;以及
[0186]
响应于确定所述发射次数等于所述更新间隔,更新施加到所述第二致动器的所述电压。
[0187]
11.根据条款8所述的方法,还包括响应于确定所述波长误差大于所述第一阈值而禁用所述低通滤波器和第二致动器的移动。
[0188]
12.根据条款8所述的方法,其中所述第一步长是所述致动器的固定步长。
[0189]
13.根据条款8所述的方法,其中所述第二步长是所述波长误差的函数。
[0190]
14.根据条款8所述的方法,其中所述第三步长是施加到所述第二致动器的所述电压的函数。
[0191]
15.根据条款8所述的方法,其中以所述第二步长移动所述第一致动器包括每n个脉冲移动所述第一致动器,其中n大于1。
[0192]
16.根据条款8所述的方法,其中所述平均波长误差基于所述波长误差和多个脉冲之上的多个波长误差的平均值。
[0193]
17.根据条款8所述的方法,其中所述方法包括在多焦点成像操作中控制所述中心波长,并且所述方法还包括以双色模式操作光源,其中以所述双色模式操作所述光源包括:
[0194]
使用第一激光室模块生成第一波长的第一激光辐射束;
[0195]
使用第二激光室模块生成第二波长的第二激光辐射束;以及
[0196]
使用射束组合器沿着公共输出射束路径组合所述第一激光辐射和所述第二激光辐射,
[0197]
其中所述确定由所述光源生成的所述射束的所述波长误差包括确定所述第一激光辐射束的中心波长误差。
[0198]
18.一种用于控制多焦点成像操作的中心波长的方法,包括:
[0199]
将抖动波形与用于移动控制棱镜的移动的致动器的偏移值相结合;
[0200]
基于所述抖动波形和所述偏移值生成脉冲间波长;
[0201]
基于多个脉冲的所述脉冲间波长生成所述中心波长的滚动平均值;
[0202]
估计漂移速率以预测未来脉冲的中心波长;以及
[0203]
基于所估计的漂移速率更新所述偏移值。
[0204]
19.根据条款18所述的方法,其中所述偏移值基于直流(dc)电压。
[0205]
20.根据条款19所述的方法,其中所述dc电压的初始值为零伏。
[0206]
21.根据条款18所述的方法,其中:
[0207]
所述偏移值包括第一偏移值,并且
[0208]
所述估计所述漂移速率包括基于所述中心波长的所述滚动平均值、所述第一偏移值、和移动控制第二棱镜的移动的第二致动器的第二偏移值来估计所述漂移速率。
[0209]
22.根据条款21所述的方法,其中所述估计所述漂移速率包括使用卡尔曼滤波器框架来估计累积的中心波长漂移速率。
[0210]
23.根据条款22所述的方法,其中所述估计所述漂移速率包括在当前脉冲之前n个脉冲预测所述中心波长。
[0211]
24.根据条款23所述的方法,其中所述估计所述漂移速率包括将所述卡尔曼滤波器框架转换为卡尔曼预测器以在所述当前脉冲之前n个脉冲预测所述中心波长。
[0212]
25.根据条款18所述的方法,其中多个脉冲的所述脉冲间波长包括当前脉冲的波长。
[0213]
26.根据条款18所述的方法,其中所述更新所述偏移值还包括基于突发结束时所述中心波长的所述滚动平均值来更新所述偏移值。
[0214]
27.一种系统,包括:
[0215]
第一致动器,被配置为控制第一棱镜的移动;
[0216]
第二致动器,被配置为控制第二棱镜的移动;以及
[0217]
控制器,被配置为:
[0218]
估计中心波长误差;
[0219]
基于所估计的中心波长误差确定所述第一致动器的第一致动量;
[0220]
引起所述第一致动器基于所述第一致动量进行致动;
[0221]
确定所述第一棱镜是否偏离中心;
[0222]
响应于确定所述第一棱镜偏离中心,确定所述第一致动器的第二致动量并且确定所述第二致动器的第三致动量;以及
[0223]
引起所述第一致动器和所述第二致动器分别基于所述第二致动量和所述第三致动量进行致动。
[0224]
28.根据条款27所述的系统,其中为了估计所述中心波长误差,所述控制器还被配置为:
[0225]
计算奇数突发处的中心波长的第一平均值和偶数突发处的所述中心波长的第二平均值;以及
[0226]
确定所述第一平均值和所述第二平均值的平均值,其中所述中心波长误差基于所述第一平均值和所述第二平均值的所述平均值。
[0227]
29.根据条款27所述的系统,其中为了确定所述第一致动量,所述控制器还被配置为:
[0228]
确定目标中心波长与估计中心波长之间的差;以及
[0229]
基于所述目标中心波长与所述估计中心波长之间的所述差来确定所述第一致动量。
[0230]
30.根据条款29所述的系统,其中为了确定所述目标中心波长与所述估计中心波长之间的所述差,所述控制器还被配置为使用数字滤波器来确定所述差。
[0231]
31.根据条款27所述的系统,其中所述第二致动器的所述第三致动量基于在基于所述第二致动量致动所述第一致动器之后所述第一棱镜的位置。
[0232]
32.根据条款31所述的系统,其中为了确定所述第三致动量,所述控制器还被配置为确定所述第三致动量以减小所述目标中心波长与所述估计波长之间的所述差。
[0233]
33.根据条款27所述的系统,其中:
[0234]
所述成像操作包括多焦点成像操作,
[0235]
所述系统还包括以双色模式操作的光源,
[0236]
所述控制器还被配置为通过以下方式以所述双色模式操作所述光源:
[0237]
使用第一激光室模块生成第一波长的第一激光辐射束;
[0238]
使用第二激光室模块生成第二波长的第二激光辐射束;以及
[0239]
使用射束组合器沿着公共输出射束路径组合所述第一激光辐射和所述第二激光辐射,
[0240]
其中所述估计中心波长误差包括估计所述第一激光辐射束的中心波长误差。
[0241]
34.一种系统,包括:
[0242]
光源,被配置为生成射束;
[0243]
第一致动器,被配置为控制第一棱镜的移动;
[0244]
第二致动器,被配置为控制第二棱镜的移动;以及
[0245]
控制器,被配置为:
[0246]
确定由所述光源生成的所述射束的波长误差;
[0247]
确定所述波长误差是否大于第一阈值;
[0248]
响应于确定所述波长误差大于所述第一阈值,引起所述第一致动器移动第一步长;以及
[0249]
响应于确定所述波长误差小于所述第一阈值:
[0250]
确定平均波长误差;以及
[0251]
确定所述平均波长误差是否大于不同于所述第一阈值的第二阈值;
[0252]
响应于确定所述平均波长误差大于所述第二阈值,引起所述第一致动器移动第二步长并且启用低通滤波器;以及
[0253]
响应于确定所述平均波长误差小于所述第二阈值,启用所述低通滤波器,更新施加到第二致动器的电压,并且引起所述第一致动器移动第三步长。
[0254]
35.根据条款34所述的系统,其中为了确定所述波长误差,所述控制器还被配置为:
[0255]
测量由所述光源生成的所述射束的中心波长;以及
[0256]
确定所述中心波长与目标中心波长之间的差。
[0257]
36.根据条款34所述的系统,其中所述控制器还被配置为:
[0258]
确定所述光源的脉冲的发射次数是否是更新间隔的倍数;以及
[0259]
响应于确定所述发射次数等于所述更新间隔,更新施加到所述第二致动器的所述电压。
[0260]
37.根据条款34所述的系统,其中所述控制器还被配置为响应于确定所述波长误差大于所述第一阈值而禁用所述低通滤波器和第二致动器的移动。
[0261]
38.根据条款34所述的系统,其中所述第一步长是所述致动器的固定步长。
[0262]
39.根据条款34所述的系统,其中所述第二步长是所述波长误差的函数。
[0263]
40.根据条款34所述的系统,其中所述第三步长是施加到所述第二致动器的所述电压的函数。
[0264]
41.根据条款34所述的系统,其中为了引起所述第一致动器以所述第二步长移动,所述控制器还被配置为引起所述第一致动器每n个脉冲进行移动,其中n大于1。
[0265]
42.根据条款34所述的系统,其中所述平均波长误差基于所述波长误差和多个脉冲之上的多个波长误差的平均值。
[0266]
43.根据条款34所述的系统,其中:
[0267]
所述系统被配置为执行多焦点成像操作,以及
[0268]
所述控制器还被配置为通过以下方式以双色模式操作所述光源:
[0269]
使用第一激光室模块生成第一波长的第一激光辐射束;
[0270]
使用第二激光室模块生成第二波长的第二激光辐射束;以及
[0271]
使用射束组合器沿着公共输出射束路径组合所述第一激光辐射和所述第二激光辐射,
[0272]
其中所述确定由所述光源生成的所述射束的所述波长误差包括确定所述第一激光辐射束的中心波长误差。
[0273]
44.一种用于控制多焦点成像操作的中心波长的系统,包括:
[0274]
致动器,被配置为控制棱镜的移动;以及
[0275]
控制器,被配置为:
[0276]
将抖动波形与用于移动所述致动器的偏移值相结合;
[0277]
基于所述抖动波形和所述偏移值生成脉冲间波长;
[0278]
基于多个脉冲的所述脉冲间波长生成所述中心波长的滚动平均值;
[0279]
估计漂移速率以预测未来脉冲的中心波长;以及
[0280]
基于所估计的漂移速率更新所述偏移值。
[0281]
45.根据条款44所述的系统,其中所述偏移值基于直流(dc)电压。
[0282]
46.根据条款45所述的系统,其中所述dc电压的初始值为零伏。
[0283]
47.根据条款44所述的系统,其中:
[0284]
所述偏移值包括第一偏移值,并且
[0285]
所述估计所述漂移速率包括基于所述中心波长的所述滚动平均值、所述第一偏移值、和移动控制第二棱镜的移动的第二致动器的第二偏移值来估计所述漂移速率。
[0286]
48.根据条款47所述的系统,其中为了估计所述漂移速率,所述控制器还被配置为使用卡尔曼滤波器框架来估计累积的中心波长漂移速率。
[0287]
49.根据条款48所述的系统,其中为了估计所述漂移速率,所述控制器还被配置为
在当前脉冲之前n个脉冲预测所述中心波长。
[0288]
50.根据条款49所述的系统,其中为了估计所述漂移速率,所述控制器还被配置为将所述卡尔曼滤波器框架转换为卡尔曼预测器以在所述当前脉冲之前n个脉冲预测所述中心波长。
[0289]
51.根据条款44所述的系统,其中多个脉冲的所述脉冲间波长包括当前脉冲的波长。
[0290]
52.根据条款44所述的系统,其中为了更新所述偏移值,所述控制器还被配置为基于突发结束时所述中心波长的所述滚动平均值来更新所述偏移值。
[0291]
实施例的广度和范围不应当受到任何上述示例性实施例的限制,而应当仅根据所附权利要求及其等效物进行限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。