1.本发明涉及一种用于确定动物组的参数的传感系统。本发明还涉及一种确定动物组的参数的方法,以及相应的计算机程序产品。所述参数可以是生长参数或活动参数。本发明还涉及一种照明系统。
背景技术:
2.农业在现代社区中已经变得更加工业化。这也是动物养殖的情况。动物的数量(和相应的动物密度),相关联的基础设施和各种生长方法被放大以在相对低的价格水平下实现经济上可行的食品(例如肉)的生产。因此,监测大量动物的活动和/或体重是例如确定饲喂策略、控制生长速率、监测动物健康和健在、规划农场物流等相关联的参数。
3.例如,家禽养殖是动物养殖的相关部分。因此,家禽的生长情况通常是通过对踩在上面的(肉鸡)鸡进行自动称量来确定的。这种称量提供了关于鸡群的实时重量信息(在一些统计处理之后)。该重量信息可用于获得关于生长情况的度量,用于发现趋势,并用于解决关于动物健康和健在的可能问题。对于动物养殖的其它部门而言,也可以看到类似的称量。
4.然而,这种称量的明显缺点是测量的重量可能由于测量偏差而相对不准确,这可能导致对用于得出重量分布的统计分析的不准确的输入。即,已知较大的家禽却使用了小于较小家禽的称量值。另一个缺点是称量是烦人的,并且需要在畜舍中进行物理放置且需要与动物交互以测量重量。另一个缺点是动物与秤之间的接触可能污染秤,从而使其不准确或甚至无法运转。
5.因此,更多的研究涉及用相机监控动物,并提供图像处理技术以提取实时生长情况。类似的替代方案通过3d感测技术的被提出。然而,即使这些解决方案是不令人厌烦的,这些解决方案也是麻烦的,并且仍然倾向于(计算)错误。此外,这些解决方案的实际实施对于仅监测和计算动物的体重而言是相当(成本)昂贵的。此外,因为这样的技术常常需要每个单独的动物都被清楚地看到或检测到,所以这种基于相机或3d感测的技术可能无法容易地应对动物组,诸如一群动物、一组动物等。
技术实现要素:
6.本发明的一个目的是提供一种传感系统,其至少减轻上述问题和缺点。为此,本发明提供了一种用于确定存在于表面区域上的动物组的参数的传感系统,其中所述传感系统包括:控制器;至少一个距离传感器,其具有视场,该视场配置为被引导到所述表面区域。其中所述至少一个距离传感器中的每个距离传感器包括单个像素,所述单个像素被配置为:在一段时间期间至少连续地测量动物组中经过该视场的动物的高度;以及在该段时间期间提供包括所测量的高度的高度信号,其中,所述控制器被配置为获得所述高度信号,并且基于在该段时间期间所测量的高度来确定所述动物组的参数。
7.根据本发明的传感系统通过使用距离传感器来实现,该距离传感器具有到表面区
域的视场。传感系统也可以表述为传感器系统,或者传感器布置。动物组存在于表面区域上。因为具有所述单个像素的距离传感器测量到经过视场的动物的距离(或:间距),所以距离传感器能够测量这些动物相对于表面区域的高度。至少一个距离传感器可以类似地测量这些动物的特定身体部位相对于表面的高度。在整个申请中,所述"距离传感器测量"可以表述为所述"距离传感器测量的单个像素"或所述"带有单个像素的距离传感器测量"。
8.因此,距离传感器的单个像素在一段时间期间至少连续地测量通过视场的动物组中动物的高度,并且在该段时间期间提供包括这些测量的高度的高度信号。替代地,所述测量可以是连续的。传感系统的控制器被配置为获得该高度信号。控制器可随后在该段时间期间基于所测量的高度来确定所述动物组的参数。因此,该参数可以与该动物组的测量高度相关。
9.因此,本发明通过使用至少一个距离传感器来实现。这样的至少一个距离传感器可以是相对成本有效的。例如,距离传感器可以是单元件传感器,诸如(例如,单像素)飞行时间(tof)传感器。这样的距离传感器提供高性能的接近度和距离感测。例如,光学飞行时间传感器可以基于发射的光子被反射的时间来直接测量到物体的距离。
10.因此,本发明的传感系统是有利的,因为动物组的参数可以通过使用较不复杂的距离传感器以及并且通过对相应高度信号进行进一步的处理以不太麻烦、更有效且更具成本效益的方式来确定。这样的参数可以例如是生长参数或活动参数。
11.甚至进一步地,确定动物组的各种参数可能是困难的,这是由于动物组中存在较大数量的动物(例如家禽养殖场中的鸡群)的原因。本发明有利地解决了这种动物组的参数的确定。例如,所述参数可以是动物组的平均体重增加。本发明可通过基于动物组中动物的测量高度来确定平均重量增加以解决该困难(根据动物文献,该重量增加可与高度增加相关)。由此通过使用所述较不复杂且成本有效的距离传感器来确定所测量的高度。因此,本发明显然有利于动物养殖。
12.该动物组中的动物可以在该段时间期间经过该至少一个距离传感器的视场。由于所述动物组可包括多个动物,所述至少一个距离传感器可测量所述多个动物中的动物。这允许传感系统建立多个动物中动物的高度的(统计)表示。例如,考虑到鸡群,所测量的高度的准确性(即,测量误差和/或标准偏差)可以通过动物组中更多数量的动物和/或通过实施至少一个距离传感器的更多距离传感器来进一步改进。
13.此外,距离传感器的单个像素可以测量在该段时间期间通过视场的动物组中动物的高度。然而,动物的高度对于动物的整个形状而言可能是不相同的。
14.例如,鸡的特征轮廓可以包括较高的头部部分,下躯体部分,以及同样较高的尾部部分。通过距离传感器的视场的鸡可以因此呈现高度信号,该高度信号包括两个顶部之间的鞍形形状(相对于时间绘制)。本发明可以有利地利用这种特征轮廓和形状来确定该动物组的各种参数。例如,当在一段时间内比较时,由最高顶部表示的鸡的头部或由鞍形形状表示的鸡的躯体部分可用于确定鸡的高度和/或平均重量增加。此外,通过视场时鸡的瞬时高度变化可以指示鸡的移动速度。也就是说,如果检测到的鞍形形状在持续时间上较短,则这指示鸡更快地移动通过所述视场。
15.控制器可以是独立控制器,或者可以与至少一个距离传感器的距离传感器一起集成在壳体中。因此,控制器可以是局部的或分布式的。至少一个距离传感器与控制器之间的
通信可以经由有线通信方式,或经由无线通信(诸如蓝牙,zigbee,wi-fi,li-fi,vlc,rf,ir,lo-ra等)来进行。
16.在一个实施例中,该动物组可构成至少10只动物(例如奶牛),或至少100只动物(例如猪或山羊),或至少1000只动物(例如鸡或啮齿动物或鱼),或至少10000只动物(例如昆虫或虾或禽类物种)。
17.此外,在整个本技术中使用的动物组的所述参数可替代地被定义为动物组的状况。
18.在实施例中:参数可以是生长参数。生长参数可以与动物组的测量高度相关。控制器可以被配置为在第二子时间段期间通过将动物组中动物的测量高度的平均值与在第一子时间段期间动物组中动物的测量高度的平均值进行比较来确定生长参数。
19.因此,在第一子时间段期间动物组中动物的测量高度的平均值可以与在第二子时间段期间动物组中动物的测量高度的平均值进行比较。该段时间可以包括所述子时间段。
20.所述比较允许监测动物组的测量高度的平均增量。即,动物组保持相同的样本。随后可以针对两个不同的测量时间段(即,分别在第一和第二子时间段执行的测量)确定动物(即,样本)的测量高度的平均值。这使得能够确定高度的增量(或:δ)(例如,增加或减小)。因此,所确定的高度增量(或:δ)对于该动物组而言可以是统计上相关的,因为该组(或:样本)包括在相应的子时间段期间通过该至少一个距离传感器的视场的足量的动物。替代地,所述“组”可以表达为“群体”。
21.由于所测量的高度可以与生长参数相关,所以可以确定与生长参数相关联的平均增量。动物的大小可以例如与动物的高度相关。动物的重量例如也可以与动物的高度相关。这些相关性在动物文献中是常见的。因此,在一个实施例中,生长参数可以是(至少)以下之一:动物组的高度的平均增量,动物组的大小的平均增量,或动物组的重量的平均增量。在各方面中,生长参数可以是上述三个平均增量的任何组合。
22.例如,为了方便起见,采取简化的示例,至少一个距离传感器可以在第一子时间段期间测量通过视场的动物群体中的动物的高度。对于在第一子时间段期间进行的测量,多个动物的测量高度可以例如被确定为平均二十厘米。因此,在各方面中,这些高度可以仅是高度信号(即顶部)中的最大高度(例如鸡的头部)。这可以指示动物群体的动物在高度上平均为20厘米。随后,所述至少一个距离传感器可以在第二时间段期间测量相同动物群体中通过视场的动物的高度。对于在第二子时间段期间进行的测量而言,多个动物的测量高度可以例如被确定为平均三十厘米。这可指示动物群体的动物在高度上平均为三十厘米。因此,两个子时间段之间的差在高度上是10厘米。因此,动物群体包括10厘米高的平均增量。因此,传感系统由此还可以基于10厘米高的平均增量来确定动物组的重量的平均增量,因为重量可以与如前所述的动物高度相关。
23.在另一示例中,生长参数可以指示生长的结束。即,控制器可以被配置为:当在第二子时间段期间动物组中动物的测量高度的平均值与在第一子时间段期间动物组中动物的测量高度的平均值的最大差异处于预定阈值内时,确定动物组的生长结束。所述预定阈值例如可以是所测量的高度的所述平均值之间的差异的至多2%,或者是该差异的至多1%。这可以指示动物组不再生长,因此实现生长的结束。这在动物养殖中可能是有利的,因为例如可以确定动物组的收获时间。换句话说,控制器可以被配置为:当在第二子时间段期间动
物组中动物的测量高度的平均值与在第一子时间段期间动物组中动物的测量高度的平均值的差不超过2%(或者1%)时,确定动物组的生长结束。
24.进一步可选地,在各方面中,生长参数可以指示生长激增。即,控制器可以被配置为:当在第二子时间段期间动物组中动物的测量高度的平均值与在第一子时间段期间动物组中动物的测量高度的平均值相差至少超过预定阈值时,确定动物组的生长激增。所述预定阈值例如可以是所测量的高度的所述平均值之间的差的至少10%,或者是该差的至少20%。这可以指示动物组生长得太快,因此具有生长激增。检测这样的生长激增在动物养殖中可能是有利的,因为它可以指示例如饲喂的过剩,或者例如错误的生长光照配方(因为动物比计划更快地生长),或者例如与动物养殖场的物流相关,或者例如与动物健康(不是太快地生长动物)有关。
25.在其它方面:参数可以是生长参数。生长参数可以与动物组的测量的身体形状相关。控制器可以被配置为:通过将在第二子时间段期间动物组中动物的测量的身体形状的平均值与在第一子时间段期间动物组中动物的测量的身体形状的平均值进行比较来确定生长参数。由此,可以通过多像素距离传感器来测量动物的身体形状,其中动物的厚度由限定高度的像素来限定(或:与限定高度的像素相关联,或由限定高度的像素来轮廓化,或由限定高度的像素来概括),并且因此不由限定地板水平的像素来限定。可选地,身体形状可以是厚度。因此,如果所述动物组(例如,鸡群)表示平均瘦的动物或骨头上具有许多脂肪的动物,则所述传感系统可以从所述平均形状中提取。因此所述多像素距离也可以由布置成阵列的单独的单像素距离传感器来限定。
26.在实施例中,参数可以是动物组的活动参数。活动参数可以与动物组的测量高度的持续时间相关。控制器可以被配置为通过将在第二子时间段期间动物组中动物的测量高度的平均持续时间与在第一子时间段期间动物组中动物的测量高度的平均持续时间进行比较来确定动物组的活动参数。更具体地:所述动物的测量高度的所述平均持续时间是考虑了所进行的所有相应测量的前提下动物的相应测量高度在时间上持续多久的平均持续时间。
27.因此,在第一子时间段期间动物组中动物的测量高度的平均持续时间可以与在第二子时间段期间动物组中动物的测量高度的平均持续时间进行比较。所述时间段可以包括所述子时间段。由于在相应的子时间段上取平均,所以动物组中的每个动物不需要经过该至少一个距离传感器的视场。
28.所述比较允许监测动物组的测量高度的持续时间的平均增量。即,动物组可以维持相同的样本。随后可以针对两个不同的测量时间段(即,分别在第一和第二子时间段执行的测量)来确定动物(即,样本)的测量高度的平均持续时间。这使得能够确定特定测量高度的持续时间的增量(或:δ)。因此,所确定的高度的持续时间的增量(或:δ)对于动物组可以是统计上相关的,因为该组(或:样本)包括在相应的子时间段期间通过至少一个距离传感器的视场的足量的动物。替代地,所述“组”可以表达为“群体”。
29.由于所测量高度的持续时间可与活动参数相关,所测量高度的持续时间可实质上指示动物的速度(或:速度),因此可确定与活动参数相关联的不同(次要/主要运动)性质。动物本身的活动例如可以与动物的测量高度的平均持续时间相关。动物的运动例如还可以与动物的测量高度的平均持续时间相关。这些相关性在动物文献中是常见的。因此,在一个
实施例中,活动参数可以是(至少)以下之一:动物组的活动,动物组的运动速率,或动物组的运动类型。在各方面中,活动参数可以是上述活动,速率和类型的任何组合。
30.例如,为了方便起见,采取简化的示例,至少一个距离传感器可以在第一子时间段期间测量通过视场的动物群体中的动物的高度。对于在第一子时间段期间进行的测量,多个动物的测量高度的持续时间可以例如被确定为平均两秒。这可以指示动物群体中的动物平均花费两秒通过视场。随后,所述至少一个距离传感器可以在第二段时间期间测量通过视场的相同动物群体中的动物的高度。对于在第二子时间段期间进行的测量,多个动物的测量高度的持续时间可以例如被确定为平均一秒。这可以指示动物群体中的动物平均花费一秒来通过视场。因此,与第一子时间段相比,动物群体在第二子时间段内平均移动得更快。因此,传感系统可以由此确定该动物群体的运动速率(例如,速度值),或者甚至确定运动的类型(例如,跑步,行走或静静的呆着);或甚至确定或导出动物的活动(例如,进食,交配,起毛或静息)。
31.因此,在一个实施例中,动物组的活动可以包括以下之一:睡眠,休息,进食或移动。替代地,该活动可以是交配。因此,在一个实施例中,动物组的运动类型可以包括以下之一:就座,行走,跑步,躺下或具有压力。
32.在一个实施例中,该动物组可以是以下之一:鸡群,畜群,猪群,陆地昆虫群或甲壳类动物群体或水生动物。所述鸡可以是母鸡,雏鸡,肉鸡,公鸡,火鸡。该动物组也可以是其它家禽或其它禽类物种的群。所述家畜可以是牛,绵羊,马,公牛,骆驼。所述猪可以是肉猪,猪猡,乳猪。该动物组可以是一组其它的陆地动物,例如狗,猫,兔,水貂,鳄鱼。所述陆地昆虫可以是适合于蛋白质生产的昆虫。该动物组可进一步包括鱼,虾或啮齿动物。该动物组可包括单个(或相同)类型的动物。
33.在一个实施例中,所述至少一个距离传感器可以是以下之一:单像素飞行时间传感器,多像素飞行时间传感器,红外线距离传感器,fmcw雷达传感器,超声波距离传感器,lidar。
34.所述至少一个距离传感器可以是4
×
4像素飞行时间传感器或8
×
8像素飞行时间传感器。所述至少一个距离传感器可以包括单个像素。所述至少一个距离传感器可以被配置为包括多个像素,并且被配置为在本发明的测量期间仅读出单个像素。
35.在一个实施例中,至少一个距离传感器的视场可以小于5cm2。这样的实施例可以是有利的,以获得例如家禽养殖场中的群的更准确的测量,因为小于5cm2的视场可以足够小以一次适合视场中的单个动物的至少一部分。这可能特别适用于家禽。视场的其它尺寸可以类似地设想用于其它动物组。
36.在一个实施例中,传感系统可以布置在表面区域中,其中,表面区域包括饲喂区域,其中,至少一个距离传感器中的距离传感器的视场配置为被引导到饲喂区域。这样的实施例可以是有利的,因为饲喂区域可以是已知动物处于特定预定义身体姿势(例如用他们的脚站立)的区域。通过使至少一个距离传感器中的距离传感器监测这样的饲喂区域,所测量的高度可以归因于处于该特定预定义身体姿势(即,例如用他们的脚站立)的动物,从而有助于确定动物组的测量高度和相关参数。
37.在一个实施例中,所述传感系统可以包括电气装置阵列;其中,所述电气装置阵列中的每个电气装置可以包括所述至少一个距离传感器的相应距离传感器。此外,在其方面
中,每一相应距离传感器可具有对表面区域的相应视场,其中每个相应的距离传感器可以被配置为:在一段时间期间至少连续地测量通过相应的视场的动物组中动物的高度;以及在该段时间期间提供包括所述测量的高度的相应的高度信号;其中,所述控制器可以被配置为获得每个相应的高度信号,并且基于在该段时间期间所测量的高度来确定所述动物组的参数。
38.在一个实施例中,所述电气装置阵列可包括照明装置阵列。这样的实施例可以是有利的,因为动物农场的照明系统可以被组织成网格形式和/或位于基本上覆盖动物组的位置的位置处。因此,使所述至少一个距离传感器与所述照明装置阵列相关联可使所述传感器能够有利地覆盖以监测所述动物组。
39.在一个实施例中,控制器可以被配置为在确定参数时控制电气装置。该电气装置可以例如是照明装置,扬声器,hvac装置,饲料装置,浇水装置,气味扩散器,风扇,电动门,加热器装置,冷却器装置,射频发射装置,传感器装置,用户接口装置,云,服务器装置。这样的实施例是有利的,因为可以基于所确定的参数来控制电气装置。如果参数可以是活动参数,诸如指示具有压力的动物组的运动类型,则可以控制电气装置以使被确定为具有压力的动物组舒缓。例如,电气装置可以是发出舒缓声音的扬声器,或提供较冷的空气以减少该动物组中的热压力的hvac系统。可以类似地设想其它实例。
40.在一个实施例中,所述电气装置可以是照明设备,其中所述控制器被配置为在确定所述参数时控制所述照明设备以提供照明特性,其中所述照明特性是以下中的至少一个:强度,颜色,色温,调制,光图案,光场景,光配方,光调度。
41.本发明的另一个目的是提供一种改进的方法,其至少减轻上述问题和缺点。为此,本发明还提供了一种确定存在于表面区域上的动物组的参数的方法,其中所述方法包括:通过距离传感器的单个像素,在一段时间期间至少连续地测量所述动物组中通过距离传感器的视场的动物的高度;在该段时间期间提供包括所测量的高度的高度信号;获得所述高度信号并且基于在该段时间期间的所测量的高度确定所述动物组的参数。应用于根据本发明的传感器系统的优点和/或实施例作必要修改后也可适用于根据本发明的方法。
42.在一个实施例中,所述参数可以是生长参数;其中所述生长参数可以与所测量的动物组的高度相关;其中根据本发明的方法(进一步)包括:通过将在第二子时间段期间动物组中动物的测量高度的平均值与在第一子时间段期间动物组中动物的测量高度的平均值进行比较来确定生长参数。
43.在一个实施例中,参数可以是活动参数;其中活动参数可以与动物组的测量高度的持续时间相关;其中根据本发明的方法(进一步)包括:通过比较第二子时间段期间动物组中动物的测量高度的平均持续时间与第一子时间段期间动物组中动物的测量高度的平均持续时间来确定动物组的活动参数。
44.在一个实施例中,所述传感系统可以包括电气装置阵列;其中,所述电气装置阵列中的每个电气装置包括所述至少一个距离传感器的相应距离传感器;其中,每个相应距离传感器具有对所述表面区域的相应视场;其中根据本发明的方法(进一步)包括:在一段时间期间至少连续地测量经过相应视场的动物组中动物的高度;在该段时间期间提供包括所述测量的高度的相应高度信号;获得每个相应的高度信号并且基于所测量的高度在该段时间期间确定所述动物组的参数。
45.本发明还涉及一种计算机程序产品。因此,本发明提供了一种用于计算设备的计算机程序产品,该计算机程序产品包括当计算机程序产品在计算设备的处理单元上运行时执行根据本发明的方法的计算机程序代码。
46.因此,本发明的各方面可以在计算机程序产品中实现,该计算机程序产品可以是存储在计算机可读存储设备上的计算机程序指令的集合,其可以由计算机执行。本发明的指令可以在呈任何可解释或可执行的代码机制形式,包括但不限于脚本,可解释程序,动态链接库(dll)或java类。指令可以被提供为完整的可执行程序,部分可执行程序,以作为对现有程序的修改(例如,更新)或对现有程序的扩展(例如,插件)。此外,本发明的部分处理可以分布在多个计算机或处理器上。
47.本发明的另一个目的是提供一种改进的照明系统,其至少减轻上述问题和缺点。为此,本发明提供了一种照明系统,其包括照明装置和根据本发明的传感系统,其中所述控制器被配置为在确定所述参数时控制所述照明装置的照明特性。
48.在一个实施例中,照明特性可以是以下中的至少一个:强度,颜色,色温,光谱,光图案,光调制,光场景,光配方,光调度,偏振。
49.在一个实施例中,其中所述控制器可以被配置为在确定所述动物组的所述重量的平均增量时控制所述照明装置以适应亮暗调度的周期。控制器还可以附加地或替代地被配置为控制照明设备以调适光配方以控制动物活动,以控制农场活动(诸如用于收获行动的功能照明等),以控制动物行为(例如,当所述动物组的平均移动被确定为增加时的攻击行为)。
50.在各方面,本发明可以不限于动物组,但是可以类似地有利地确定单个动物的参数(诸如活动参数)。因此,本发明提供一种用于确定存在于表面区域上的动物的参数的传感系统,其中所述传感系统包括:控制器;至少一个距离传感器,其具有到所述表面区域的视场。其中所述至少一个距离传感器被配置为:在一段时间期间至少连续地测量通过视场的动物的高度;以及在该段时间期间提供包括所述测量的高度的高度信号;其中,所述控制器被配置为获得所述高度信号,并且在该段时间期间基于所测量的高度来确定动物的参数。应用于根据本发明第一方面的传感器系统的优点和/或实施例作必要修改后也可适用于本发明的该方面。
51.该参数可以是生长参数。生长参数可以与动物的测量高度相关。控制器可以被配置为通过将第二子时间段期间动物的测量高度的平均值与第一子时间段期间动物的测量高度的平均值进行比较来确定生长参数。生长参数可以是以下之一:动物高度的平均增量,动物大小的平均增量,或动物重量的平均增量。该参数可以是动物的活动参数。生长参数可以与动物的测量高度的持续时间相关。控制器可以被配置为通过比较第二子时间段期间动物的测量高度的平均持续时间与在第一子时间段期间动物中动物的测量高度的平均持续时间来确定动物的活动参数。活动参数可以是以下之一:动物的活动,动物的运动速率或动物的运动类型。动物的活动可以包括以下之一:睡眠,休息,进食或移动。动物的运动类型可以包括以下之一:就座,行走,跑步,躺下或具有压力。
52.在各方面中,本发明提供了一种用于确定存在于一位置处的表面区域上的动物组的参数的传感系统,其中所述传感系统包括:控制器;至少一个距离传感器,所述至少一个距离传感器具有到所述表面区域的视场并且定位在相应位置处。其中所述至少一个距离传
感器被配置为:在一段时间期间,在相应位置处至少连续地测量通过视场的所述动物组中动物的高度;以及在该段时间期间在所述相应位置处提供包括所测量的高度的高度信号;其中,所述控制器被配置为获得所述高度信号并且获得所述至少一个距离传感器的每个相应位置;以及在该段时间期间在所述至少一个距离传感器的每个相应位置处基于所测量的高度来确定所述动物组在某一位置处的参数。当所述至少一个距离传感器的数量和分布足以覆盖所述表面区域的大部分时,则所述传感系统可以提供所测量的高度信号的热图,并且确定在该段时间期间这些测量的高度的平均变化(如在本技术之前所限定的那样)。这可以允许传感系统确定该动物组的参数,还在该段时间期间提供该参数的(增量的)空间(例如,x,y)分布。应用于根据本发明第一方面的传感器系统的优点和/或实施例作必要修改后也可适用于本发明的该方面。
53.在各方面中,本发明提供了一种用于确定存在于表面区域上的动物组的参数的传感系统,其中所述传感系统包括:控制器;至少一个距离传感器,其具有配置为被引导到所述表面区域的视场;其中,所述至少一个距离传感器中的每个距离传感器被配置为:在一段时间期间至少连续地测量通过视场的动物组中动物的高度;以及在该段时间期间提供包括所述测量的高度的高度信号;其中,所述控制器被配置为获得所述高度信号,并且在该段时间期间基于所测量的高度来确定所述动物组的参数。
54.在其实施例中,所述至少一个距离传感器中的每个距离传感器包括单个像素,所述单个像素被配置为在一段时间期间至少连续地测量通过视场的所述动物组中动物的高度,并且在该段时间期间提供包括所述测量的高度的高度信号。
附图说明
55.现在将通过示意性的非限制性附图进一步阐明本发明:图1示意性地示出了根据本发明的传感系统的实施例;图2示意性地描绘了根据本发明的距离传感器的视场中的鸡的一组高度信号;图3示意性地示出了根据本发明的照明系统的实施例;图4示意性地描绘了根据本发明的方法的实施例。
具体实施方式
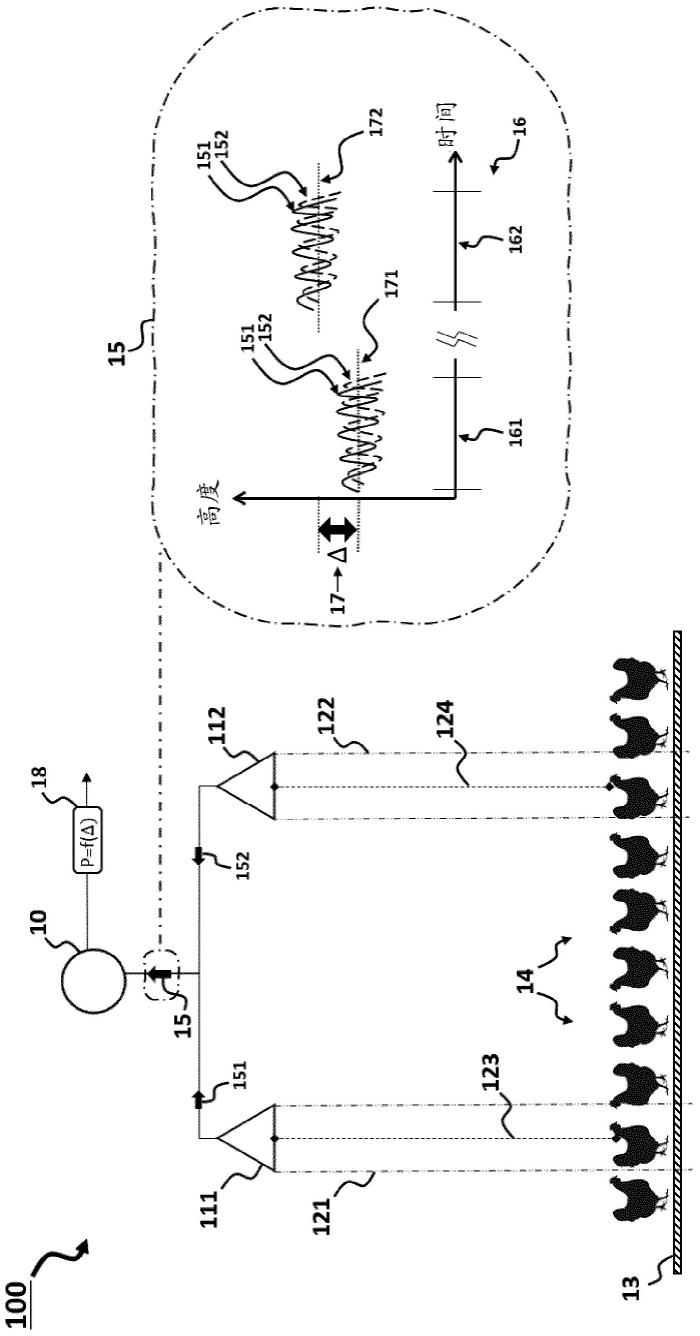
56.图1通过非限制性示例示意性地描绘了根据本发明的传感系统100的实施例。传感系统100安装在包括一组动物(动物组)14的动物农场中,在此,动物农场生产家禽,特别是鸡。因此,动物农场包括一群鸡(鸡群)14。鸡群14存在于动物养殖场的表面区域13上。鸡群14由动物农场界定,但在表面区域13上自由移动。表面区域13可以是农场的地板(或:寝具)(或:畜舍)。鸡群14可以被认为在动物农场中表现出共同的有生机的(或:基本上随机的,或:本能的)运动。
57.或者,动物农场可以是包括该动物组的另一场所。或者,所述动物组可以是在本技术之前提供的另一动物组,例如一组猪,或一群绵羊,或一群家畜或一群马或一群昆虫。
58.传感系统100被布置为确定动物组14的参数18。因此,传感系统100包括控制器10和至少一个距离传感器111,112。如图1所示,但不在任何意义上限于该数量,本实施例包括第一距离传感器111和第二距离传感器112。因此可替代地,至少一个距离传感器可以是单
个距离传感器。在不同但类似的实施例(未描绘)中,传感系统因此可以仅包括一个距离传感器,诸如仅距离传感器111,而下文描述的其他特征作必要修改后也是适用的。
59.参照图1,距离传感器111,112是单像素光学飞行时间传感器。这种飞行时间传感器提供高性能的接近度和距离感测。该飞行时间传感器可以基于发射的光子被反射的时间直接测量到物体的距离。因此,第一距离传感器111被配置为测量到处于其(单像素)视场(或:检测区域)中的物体(即,鸡群的鸡)的距离123。因此,第二距离传感器112被配置为测量到处于其(单像素)视场(或:检测区域)中的物体(即,鸡群的鸡)的距离124。可选地,所述至少一个距离传感器可以是以下之一:多像素飞行时间传感器,红外线距离传感器,fmcw雷达传感器,超声波距离传感器或lidar。
60.控制器10与第一距离传感器111和第二距离传感器112有线通信。替代地,该通信可以为无线通信,该无线通信经由在本技术之前提供的无线通信模式。控制器10因此与至少一个传感器111,112分离。替代地,控制器10可以是至少一个距离传感器中的至少一个的一部分,诸如本地控制器或分布式控制器。
61.仍然参考图1,至少一个距离传感器包括(或:具有)表面区域13的视场。因此,第一距离传感器111和第二距离传感器112包括到表面区域13的相应的第一视场121和相应的第二视场122。
62.鸡群14的各种鸡可以在一段时间16期间通过距离传感器111,112的视场121,122。第一距离传感器111以及第二距离传感器112两者至少连续地测量在时间段16期间通过相应的视场121,122的鸡群14中鸡的高度151,152。可以通过已知的处理方式从测量的距离123,124获得鸡的高度。由此,第一距离传感器111在时间段16期间提供包括测量高度151的高度信号,并且第二距离传感器112在时间段16期间提供包括测量高度152的高度信号。(在上面提到的包括仅具有一个距离传感器的传感系统的替代实施例中,高度信号因此也将是单个高度信号)。这里,这两个高度信号被认为是根据本发明的(聚集的)高度信号15。由于鸡群14可以包括多个鸡,所以至少一个距离传感器111,112可以测量鸡群14的各种鸡和许多鸡。这允许传感系统建立鸡群14中鸡的高度的(统计)表示。
63.在示例中,视场可以包括专用尺寸,其可以例如小于5cm2。在示例中,表面区域还可以包括饲喂区域,其中,至少一个距离传感器的距离传感器可以具有到饲喂区域的视场。这可能是有利的,因为饲喂区域可以是鸡被已知用他们的脚站立的区域,并且可以更准确地确保测量鸡的站立高度。
64.仍然参考图1,如上所述,至少一个距离传感器111,112在时间段16期间提供包括所述测量高度151,152的高度信号15。控制器10获得所述高度信号15(或者从例如服务器(该至少一个距离传感器发送测量数据到服务器)接收或检索所述高度信号15)。控制器10还基于在时间段16期间测量的高度151,152来确定鸡群14的参数18。
65.更具体地,参数18是生长参数。即,生长参数是鸡群14重量的平均增量。生长参数与鸡群14的测量高度151,152相关,即:重量的增加可以通过高度的增加在文献中确定。因此,控制器10通过比较第二子时间段162期间鸡群14动物中动物的测量高度152的平均值172与第一子时间段161期间动物组14中动物的测量高度151的平均值171来确定生长参数(即,鸡群14的重量的平均增量)。也就是说,这种比较呈现鸡群14的高度的平均增量(或:δ)17,因此其可以与鸡群14的重量增加的平均增量相关。或者,所述生长参数可以是动物组的
大小的平均增量,或者是动物组本身的高度的平均增量。
66.因此,传感系统100通过由相应距离传感器111,112测量的高度信号15来确定生长参数18,生长参数18是鸡群4的重量的平均增量。这是确定(有生机的且连续移动的)鸡群14的生长参数18的不太麻烦、更有效和更具成本效益的方式。因此,本发明对于动物养殖明显有益,特别是对于家禽养殖是有益的。
67.在未示出的实施例中,提供了图1中描绘的实施例,但是其中传感系统包括两个照明装置的阵列。第一照明装置包括第一距离传感器。其第二照明装置包括第二距离传感器。因此,照明装置是具有壳体的照明器,并且相应的距离传感器容纳在同一壳体内。照明器可以以照明特性照亮表面区域。控制器然后可以被配置为在确定生长参数时控制第一和/或第二照明设备以提供照明特性。照明特性是以下中的至少一种:强度,颜色,色温,调制,光图案,光场景,光配方,光调度。
68.图2通过非限制性示例示意性地描绘了鸡210的高度信号的集合200。利用根据本发明的距离传感器211来测量鸡210的高度信号的集合200。也就是说,鸡210在该距离传感器211的视场中,或以特定速度通过所述视场。距离传感器211是单像素光学飞行时间传感器,但替代地也可以是多像素飞行时间传感器,红外线距离传感器,fmcw雷达传感器,超声波距离传感器。距离传感器211被配置为测量到鸡210的距离,从而被配置为测量鸡210相对于鸡210所存在的表面区域(未示出)的高度。例如,这可以是畜舍地板。距离传感器211被配置为在一段时间240期间测量鸡210的高度。
69.参考图2,在第一情况201中,鸡210在时间段240期间静息并坐在距离传感器211的视场内。在第一情况201中,鸡的测量高度231因此在时间段240的范围内基本恒定。因此测量高度231的持续时间241是相对长的持续时间,例如1小时。在鸡群的多个鸡暴露出该(静息和坐着)行为的情况下,那么所测量的高度231的平均持续时间也可以平均为这样的相对长的持续时间。
70.参考图2,在第二种情况202中,鸡210在时间段240期间通过距离传感器211的视场(或:在距离传感器211的视场中移动)。因此鸡210的测量高度232在时间段240上呈现特征高度信号。因此特征高度信号是鸡的两个顶部(对应于鸡的头部)之间的鞍形形状,躯体和尾部。在第二种情况202中,鸡210的速度212相对较慢,因为例如鸡可能感觉舒适。因此,所测量的高度232的持续时间242是相对中等的持续时间,例如一秒。在鸡群的多个鸡暴露出该(慢速)行为的情况下,那么所测量的高度的平均持续时间也可以平均为这样的相对中等的持续时间。
71.参考图2,在第三种情况203中,鸡210在时间段240期间通过距离传感器211的视场(或:在距离传感器211的视场中移动),因此鸡210的测量高度233在时间段240上呈现特征高度信号。因此特征高度信号是鸡的两个顶部(对应于鸡的头部)之间的鞍形形状,躯体和尾部。在第三种情况203中,鸡210的速度213相对较快,因为例如鸡可以感觉压力。因此,测量高度233的持续时间243是相对短的持续时间,例如一秒。在鸡群的多个鸡暴露出该(高速)行为的情况下,那么所测量的高度的平均持续时间也可以平均为这样的相对短的持续时间。
72.因此,仍然参考图2,对应于三种不同情况201,202,203的高度信号231,232,233可以指示鸡210的活动参数,诸如静息,正常舒适行为和压力。根据本发明的传感系统可以通
过在一段时间240期间分析鸡210的测量高度来确定活动参数。该分析作必要修改后也可以应用于至少一个距离传感器,并应用于一组鸡,例如鸡群。这可以呈现指示鸡群的平均行为的平均值。
73.图3通过非限制性示例示意性地描绘了根据本发明的照明系统300的实施例。照明系统300包括根据本发明的传感系统。即,照明系统300包括照明器301。照明器301包括控制器303,光源306和距离传感器302。这里,控制器303包括照明器301。距离传感器302具有到表面区域33的视场304。表面区域33是猪舍的一部分。因此,一组猪34存在于表面区域33上。光源306布置成用照明特性307照亮表面区域33。
74.或者,所述一组猪可以是单个猪,或在本技术之前所述的动物组。可选地,距离传感器可以是至少一个距离传感器,例如照明系统可以包括多个照明器(诸如阵列),每个照明器包括至少一个距离传感器的相应距离传感器。替代地,控制器可以位于照明器的外部,诸如中央控制器,例如可操作地耦合到多个照明器的中央控制器。光源可以由(相同的)控制器控制。
75.参考图3,距离传感器302至少连续地(但优选连续地)测量在一段时间36期间通过视场304的猪组34的猪的高度305。视场304被布置成使得一次基本上只有一个猪可占据视场304。距离传感器302是单像素光学飞行时间传感器,但也可以是多像素飞行时间传感器,红外线距离传感器,fmcw雷达传感器,超声波距离传感器。
76.距离传感器302向控制器303提供在时间段36期间猪组34中猪的测量高度305。即,距离传感器302向控制器303提供包括在时间段36期间所测量的高度305的高度信号35。控制器303获得高度信号35并处理高度信号35。因此控制器303基于在时间段36期间所测量的高度305来确定一组猪34的参数40。
77.更具体地,在本实施例中,参数40是活动参数。活动参数是猪的运动类型。活动参数40与猪组34的测量高度305的持续时间相关。即,控制器通过比较在第二子时间段38期间猪组34中猪的测量高度305的平均持续时间348与在第一子时间段37期间猪组34中猪的测量高度305的平均持续时间347来确定猪组34的运动类型。
78.如图3所示,在第二子时间段38期间猪组34中猪的测量高度305的平均持续时间348比在第一子时间段37期间猪组34中猪的测量高度305的平均持续时间347短。这意味着猪组34中猪在第二时间段38中的平均移动比第一子时间段37更快。关于如何确定速度增量的类似原理在与图2相关的主题中解释了。
79.因此,考虑到高度信号35,控制器303推断猪组34具有平均(作为组)增加的运动和/或移动。这种增加的运动和/或移动可以指示(或涉及)从行走到跑步而改变的运动类型。这种运动类型的改变可以指示猪组34中的整体压力。
80.仍然参考图3,在控制器303确定活动参数40时,控制器303基于活动参数40控制照明设备301的光源306以提供照明特性307。这里,照明特性是减小的光强度和舒缓的光场景,以便使猪组34安静,这是因为藉由它们的平均更快的运动和/或移动,猪组34被确定为处于压力之下。
81.替代地,所述照明装置可以是另一电气装置,例如扬声器,hvac装置,饲料装置,浇水装置,气味扩散器,风扇,电动门,加热器装置,冷却器装置。这样的装置还可以为猪组提供安静效果。电气装置还可以是例如射频发射装置,用户接口装置,云,服务器装置。这样的
设备可以向畜舍负责人或农场所有者传达通知信号。
82.图4通过非限制性示例示意性地描绘了确定存在于表面区域上的动物组的参数的方法400的实施例。该方法由根据本发明的距离传感器和控制器执行,该距离传感器和控制器可以是传感系统或照明系统或照明装置的一部分。替代地,该方法可以针对存在于表面区域上的单个动物来执行。方法400包括步骤401:至少连续地(例如连续地)测量在一段时间期间动物组中通过距离传感器的视场的动物的高度。方法400包括步骤402:从距离传感器向控制器提供高度信号,所述高度信号包括在该段时间期间所测量的高度。替代地,所述提供可以为输送。该方法包括步骤403:控制器获得所述高度信号。所述获得可以是通过控制器接收或检索所述高度信号。例如,可以经由诸如云的中间装置将高度信号传送到控制器。所述方法还包括步骤404:控制器基于在该段时间期间所测量的高度确定所述动物组的参数。
83.该参数可以是生长参数。所述生长参数与所述动物组的测量高度相关。因此,该方法包括步骤405:通过比较在第二子时间段期间动物组中动物的测量高度的平均值与在第一子时间段期间动物组中动物的测量高度的平均值来确定生长参数。然而,该参数也可以是活动参数。活动参数与动物组的测量高度的持续时间相关。因此,该方法可替代地或附加地包括步骤406:通过比较在第二子时间段期间动物组中动物的测量高度的平均持续时间与在第一子时间段期间该动物组中动物的测量高度的平均持续时间来确定该动物组的活动参数。。
84.在另外的实施例中(还在图4中示出),根据本发明的方法还可以包括步骤407:在确定上述参数时控制电气装置。例如,该电气装置可以是照明设备,其照明特性被控制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。