1.本发明涉及一种用于车辆的传感器总成,其具有:至少两个控制器,每个控制器包括至少一个评估和控制单元;以及多个传感器元件,每个传感器元件分配给可制动的车轮并被设计用于检测所分配的车轮的至少一个物理变量,并作为输出信号予以输出。这些控制器分别被设计成基于检测到的车轮的物理参数执行车辆的至少一种制动功能。本发明还涉及具有这种传感器总成的相应的多回路制动系统。
背景技术:
2.对于高度自动化的或自动的驾驶以及对于半自动化的或半自动的驾驶功能,通常需要冗余,以便即使在许多故障情况下也能保证传感器和功能的可用性。因此通常使用具有车辆主级和次级稳定性的制动系统。具体地,通常使用两个独立的制动器或制动控制系统来进行制动。理想情况下,两者都应该从具有高可用性的转数传感器获得转数信息,每个转数传感器都分配给一个车轮。在当今的解决方案中,转数传感器与主控制器直接点对点地连接。在双箱系统方法中,例如esp系统作为主系统且机电的或其他电动的制动助力器作为次级系统,或集成的制动系统(ipb)作为主系统且冗余的制动系统rbu(rbu:冗余制动单元)作为次级系统,转数传感器的传感器信号要么通过主控制器循环到次级控制器,这需要额外努力和成本,并且也不能涵盖所有故障情况,或者转数传感器在故障情况下通过切换装置在主控制器和次级控制器之间切换。另一种已知的解决方案提供八个转数传感器,其中四个直接连接到主控制器,四个直接连接到次级控制器。通过这种划分,在每个车轮上安装了两个转数传感器,以便系统可以冗余地稳定车辆。这意味着每辆车总共有八个转数传感器,并且花费了用于这些传感器和布线的与此相关联的双倍成本。
3.由de 10 2015 209 565 a1已知用于运行机动车辆的方法和装置。该装置包括用于每个外部转数传感器的输入端、第一控制机构、具有用于每个转数传感器的转数检测机构的第二控制机构、以及可以通过其确定车轮转数的计算机构。来自转数检测机构的转数信号可以被馈送到第一控制机构和装置的输出端,其中转数检测方向在功能上彼此分离,并且其中第二控制机构在功能上与第一控制机构和计算机构分离。因此,转数检测系统的每个单独信道都设计为冗余且能够被唤醒。在装置有缺陷的情况下,车轮转数仍可用于可连接到装置输出端的其他控制器,例如用于控制次级制动系统。这是通过将转数检测方向作为一种分离器实现的,其将转数信号分配给多个用户。
4.由de 10 2015 110 965 a1已知一种自主的车辆控制子系统,其包括彼此通信和电连接的第一和第二制动控制模块,以及多个车轮转数传感器。在此,包括至少第一个车轮转数传感器的车轮转数传感器的第一子集通信地与第一制动控制模块连接,而不与第二制动控制模块连接,并且包括至少第二个车轮转数传感器的车轮转数传感器的第二子集通信地与第二制动控制模块连接,而不与第一制动控制模块连接。在车辆和自主的车辆控制子系统的通常的操作期间,制动控制模块相互通信,以提供来自各种传感器的车轮转数数据,从而每个制动控制模块可以执行用于控制车辆制动的操作。然而,如果其中一个制动控制
模块发生故障,例如能量损失,则另一个车辆控制子系统至少具有一些车轮转数数据,即来自至少一个车轮转数传感器的车轮转数数据。
技术实现要素:
5.具有独立权利要求1的特征的用于车辆的传感器总成和相应的多回路制动系统各自具有的优点是,冗余传感器元件方案可以用标准传感器元件来实现,而没有切换装置,这些传感器元件优选地被设计为转数传感器,其中可以节省用于双转数传感器和布线的成本。此外,可以在两个控制器中省去电路部分。在具有四个速度传感器和分布在两个控制器上的四个评估和控制单元的传感器总成的优选设计中,在故障情况下,传感器元件可以按有利的方式在两个控制器之间移交或接管,而无需额外的切换装置且没有延迟时间,因为两个控制器可以同时接收和评估四个转数传感器的输出信号。
6.本发明的实施方式提供一种用于车辆的传感器单元,该传感器单元具有:至少两个控制器,每个控制器包括至少一个评估和控制单元;以及多个传感器元件,每个传感器元件被分配给可制动的车辆车轮与控制器的评估和控制单元之一,并且被设计用于检测所分配的车轮的至少一个物理变量,并将其作为输出信号直接输出到所分配的评估和控制单元。这些控制器分别被设计用于基于检测到的车轮的与运动相关的物理变量来执行车辆的至少一个制动功能。各个评估和控制单元被设计用于将接收到的输出信号分别输出到另一控制器的至少一个评估和控制单元,使得各个评估和控制单元分别接收来自至少两个传感器元件的输出信号并准备用于评估,这些传感器元件被分配给不同的控制器的评估和控制单元。
7.此外,提出一种特别是用于高度自动化的或自主的车辆的多回路制动系统,该多回路制动系统具有:多个车轮制动器,每个车轮制动器布置在车轮上;这种传感器总成,其检测车轮的至少一个物理变量;主控制器,其基于检测到的车轮的至少一个物理变量来执行车辆的至少一个制动功能;次级控制器,其基于检测到的车轮的至少一个物理变量来执行车辆的至少一个制动功能。
8.在当前情况下,控制器或主控制器或次级控制器可以理解为处理或评估所检测到的传感器信号的电设备。为此,控制器可以具有至少一个用于接收和准备或处理电的输出信号的评估和控制单元、至少一个用于评估准备好的输出信号的计算单元、至少一个用于存储信号或数据的存储单元、至少一个用于读取输出信号的传感器元件接口或用于向致动器输出控制信号的致动器的接口和/或至少一个用于读取或输出数据的通信接口,它们嵌入到通信协议中。在当前情况下,致动器例如设计为电磁阀或压力发生器,它们可以由控制器相应地控制。至少一个接口可以按照硬件和/或软件来设计。在按照硬件设计的情况下,接口例如可以是所谓的系统电路的一部分,该系统电路包含控制器的各种功能。这种系统电路优选地设计为专用集成电路(asic)。于是例如可以将至少一个评估和控制单元设计为asic。然而也可行的是,接口是独立的集成电路或至少部分地由分立的器件组成。在按照软件设计的情况下,接口可以是软件模块,这些软件模块例如与其他软件模块一起存在于微控制器上。计算单元例如可以是信号处理器、微控制器等,其中,存储单元可以是闪存、eeprom或磁存储单元。具有程序代码的计算机程序产品也是有利的,该程序代码存储在诸如半导体存储器、硬盘存储器或光学存储器的机器可读的载体上,并用于在计算单元执行
程序时进行评估。结合主致动器或次级致动器,两个控制器可以执行各种制动功能,例如abs、esp、asr和/或hillhold功能(abs:防抱死制动系统,esp:电子稳定程序,asr:牵引力控制系统)。在这里,两个控制器可以在正常操作中执行各种制动功能。如果两个控制器中的一个失灵,则可以规定,另一个控制器至少部分地接管失灵的控制器的制动功能,以便形成相应的后备层级。
9.在当前情况下,主致动器或次级致动器可以理解为液压的和/或机电的组件,通过该组件,在致动系统中为了在车轮制动器内建立压力或降低压力,可以执行用于abs功能(abs:防抱死制动系统)或asr功能(asr:牵引力控制)或电子稳定程序(esp)或自动驻车制动功能的相应的控制和/或调节过程。为了执行控制和/或调节过程,主致动器或次级致动器包括至少一个制动压力发生器和一个带电磁阀的液压阀单元,由于反作用力“磁力”、“弹簧力”和“液压力”,这些电磁阀通常可以保持在明确的位置。相应地,电磁阀类型有“常开”和“常闭”。此外,还使用双稳态电磁阀,可以在“常开”和“常闭”状态之间切换,其中,这种双稳态电磁阀持久地保持在相应的工作状态,直到下一个切换信号。制动压力发生器可以特别地通过人力、辅助动力和/或外部动力来致动。“辅助动力”是指由制动助力器支持的肌肉力量致动。为了执行驻车制动功能,可以在至少一个车桥、优选后桥的车轮上分别布置机电致动器,这些机电致动器可以通过相应的控制信号被激活或去激活。
10.在当前情况下,传感器元件可以理解为电器件,其在所分配的车轮的区域中直接或间接地检测物理变量或物理变量的变化,并且优选将其转换成电的输出信号。这种传感器元件可以优选地设计为转数传感器,其中,相应的转数信息优选地能够通过扫描磁编码器或铁磁齿轮来确定。磁性编码器例如设计为测量值传感器环,其具有多个均匀地沿其圆周分布地布置的磁性元件,尤其是永磁体,这些磁性元件具有交变的磁取向并且形成一对磁极。借助转数传感器,检测在测量值传感器环旋转时磁性元件的磁场,其中,根据评估和控制单元的相应的检测到的磁场的磁通量,通过电流接口提供输出电流,以进一步用作转数信息。速度传感器例如可以包括霍尔、gmr、amr或tmr传感器元件(gmr:giant magnetoresistance或巨磁阻,amr:anisotrope magnetoresistance或各向异性磁阻,tmr:tunnel magnetoresistance或隧道磁阻)。在这种情况下,相应的转数传感器可以将其输出信号作为数据协议,例如ak协议或i协议,通过电流接口传输到相应的评估和控制单元。为了确定转数信息,转数传感器例如检测磁极对的过零,其中,在每次磁极对过零时,即检测到的磁场强度的符号变化时,产生所谓的“速度脉冲”,其表示实际的转数信息。ak协议包括作为转数信息的“速度脉冲”和作为具有多个协议位的数据字的至少一个附加转数信息。协议位定义至少一条附加转数信息的数据内容。至少一个附加转数信息例如涉及旋转方向信息、气隙信息、温度信息、压力信息等。
11.在当前情况下,评估和控制单元可以被理解为电路,优选专用集成电路(asic),其接收和输出或者准备或处理传感器元件的输出信号并且将它们作为准备好的输出信号输出。因此,流过相应传感器元件的传感器电流可以用关于检测到的测量变量的信息进行调制,并且传输到所分配的评估和控制单元,并在那里转换成代表相应测量信息的电压信号。此外,各个评估和控制单元例如可以将表示实际测量信息的“速度脉冲”作为电压信号分别通过点对点连接实时地提供给另一个控制器中的至少一个评估和控制单元。评估和控制单元可以具有多个接口,这些接口被设计为评估和控制单元的一部分。然而也可行的是,接口
是独立的集成电路,或至少部分地由分立的器件组成。
12.通过在从属权利要求中列出的措施和改进,可以对独立权利要求1中给出的用于车辆的传感器总成进行有利的改进。
13.特别有利的是,控制器可以分别包括至少一个计算单元。在这种情况下,各个评估和控制单元可以将准备好的输出信号传输到相应控制器的至少一个计算单元。此外,准备好的输出信号可以包括额外的测量信息,例如旋转方向信息、气隙信息、温度信息、压力信息等,并且从各个评估和控制单元传输到相应的计算单元。各个计算单元可以评估准备好的输出信号以执行车辆的相应的至少一种制动功能。
14.在传感器总成的一个有利的设计中,至少一个物理变量可以代表一个与运动相关的测量变量和/或相应车轮的另一个测量变量。与运动相关的测量变量例如可以表示转数和/或旋转速度和/或旋转方向。相应车轮的至少一个其他测量变量例如可以表示温度和/或轮胎压力。
15.在传感器总成的另一个有利的设计中,计算单元可以基于准备好的输出信号分别生成各个车轮的测量数据,并且提供给数据总线以在车辆中分配。数据总线可以是例如can总线系统或以太网或flexray。当然,在车辆中也可以使用其他合适的网络或上述网络的组合来分发测量数据。
16.在传感器总成的另一有利设计中,各个传感器元件可以分别设计为标准转数传感器。这使得根据本发明的传感器总成的特别成本有效的实施成为可能。
17.在传感器总成的另一有利设计中,至少两个控制器中的第一控制器和至少两个控制器中的第二控制器可以分别包括两个评估和控制单元。在这种情况下,两个控制器中的第一评估和控制单元可以分配给第一车桥的车轮。此外,两个控制器中的第二评估和控制单元可以分别分配给第二车桥的车轮。此外,两个控制器的分配给第一车桥的车轮的的第一评估和控制单元和两个控制器的分配给第二车桥的车轮的第二评估和控制单元可以分别彼此交换所分配的传感器元件的所接收的输出信号。
18.在传感器总成的另一有利的设计中,两个控制器的评估和控制单元可以分别将所分配的传感器元件的所接收的输出信号传输到至少一个另外的控制器。
19.在传感器总成的另一有利的设计中,控制器可以分别具有冗余的电源。因此,即使其中一个电源发生故障,也可以对输出信号进行评估和传输以及进行相关的车辆功能。
20.在传感器总成的另一有利的设计中,第一控制器可以被设计为主控制器,并且可以控制esp系统或具有与真空无关的电液制动助力器的esp系统。第二控制器可以设计为次级控制器,并且可以控制与真空无关的电液制动助力器或冗余制动单元。至少一个另外的控制器可以是被设计用于控制车辆的电驱动器的逆变器的驱动控制器,或者是被设计用于计算运动轨迹的中央控制器。
21.在传感器总成和具有这种传感器总成的多电路制动系统的实施方式中,在故障情况下,在评估和控制单元之一失效时,在两个控制器中仍然有三个传感器元件的输出信号和准备好的输出信号可用于评估。如果控制器之一中的计算单元之一发生故障,则在两个控制器中的另一个中仍然有四个传感器元件的输出信号和准备好的输出信号仍可用于评估。如果四个传感器元件中的一个发生故障,在两个控制器中仍有其他三个传感器元件的输出信号和准备好的输出信号可用于评估。
附图说明
22.附图中示出了本发明的一个实施例,并且在下面的描述中进行更详细的解释。在附图中,相同的附图标记表示执行相同或类似功能的组件或元件。
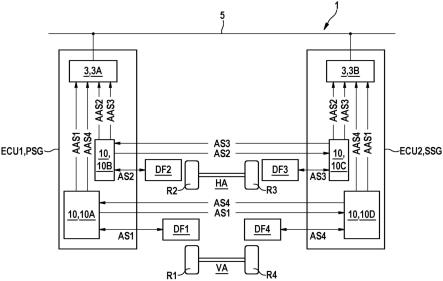
23.图1示出了根据本发明的用于车辆的传感器总成的实施例的示意性框图。
具体实施方式
24.如从图1可以看出,用于车辆的根据本发明的传感器总成1的所示实施例包括至少两个控制器ecu1、ecu2,每个控制器包括至少一个评估和控制单元10、10a、10b、10c、10d和多个传感器元件df1、df2、df3、df4,每个传感器元件被分配给一个可制动的车轮r1、r2、r3、r4与控制器ecu1、ecu2的评估和控制单元10a、10b、10c、10d之一,并且被设计用于检测所分配的车轮r1、r2、r3、r4的至少一个物理变量,并将它们作为输出信号as1、as2、as3、as4直接输出到所分配的评估和控制单元10a、10b、10c、10d。控制器ecu1、ecu2基于检测到的车轮r1、r2、r3、r4的运动相关的物理变量来执行车辆1的至少一个制动功能。各个评估和控制单元10a、10b、10c、10d将接收到的输出信号as1、as2、as3、as4分别输出到另一控制器ecu1、ecu2的至少一个评估和控制单元10a、10b、10c、10d,使得各个评估和控制单元10a、10b、10c、10d分别接收至少两个传感器元件df1、df2、df3、df4的输出信号as1、as2、as3、as4并准备用于评估,这些传感器元件被分配给不同的控制器ecu1、ecu2的评估和控制单元10a、10b、10c、10d。
25.如从图1还可以看出,所示实施例中的传感器总成1包括两个控制器ecu1、ecu2和四个被设计为标准转数传感器的传感器元件df1、df2、df3、df4。在此,第一传感器元件df1分配给第一车轮r1、第一车桥va(这里是前桥)以及第一控制器ecu1的第一评估和控制单元10a。第二传感器元件df2分配给第一车轮r2、第二车桥ha(这里是后桥)以及第一控制器ecu1的第二评估和控制单元10b。第三传感器元件df3分配给第二车桥ha的第二车轮r3和第二控制器ecu2的第二评估和控制单元10c。第四传感器元件df4分配给第一车桥va的第二车轮r4和第二控制器ecu2的第一评估和控制单元10d。因此,在所示的实施例中,两个控制器ecu1、ecu2的第一评估和控制单元10a、10d分配给第一车桥va的车轮r1、r4,而两个控制器ecu1、ecu2的第二评估和控制单元10b、10c被分配给第二车桥ha的车轮r2、r3。
26.如从图1中还可以看出,所示实施例中的两个控制器ecu1、ecu2分别包括计算单元3、3a、3b,其中,第一控制器ecu1包括第一计算单元3a,第二控制器ecu2包括第二计算单元3b。此外,两个控制器ecu1、ecu2分别具有未示出的冗余电源。
27.如从图1中还可以看出,第一控制器ecu1的第一评估和控制单元10a将接收到的第一传感器元件df1的输出信号as1传输到第二控制器ecu2的第一评估和控制单元10d,并且第二控制器ecu2的第一评估和控制单元10d将接收到的第四传感器元件df4的输出信号as4传输到第一控制器ecu1的第一评估和控制单元10a。因此,两个控制器ecu1、ecu2的第一评估和控制单元10a、10d分别接收分配给第一车桥va的车轮r1、r4的第一传感器元件df1和第四传感器元件df4的输出信号as1、as4。此外,两个评估和控制单元10a、10d准备第一传感器元件df1和第四传感器元件df4的输出信号as1、as4,其中第一控制器ecu1的第一评估和控制单元10a将准备好的输出信号aas1、aas4传输给第一控制器ecu1的第一计算单元3a用于评估。第二控制器ecu2的第一评估和控制单元10d将准备好的输出信号aas1、aas4传输到第
二控制器ecu2的第二计算单元3b用于评估。
28.如从图1中还可以看出,第一控制器ecu1的第二评估和控制单元10b将接收到的第二传感器元件df2的输出信号as2传输到第二控制器ecu2的第二评估和控制单元10c,并且第二控制器ecu2的第二评估和控制单元10c将接收到的第三传感器元件df3的输出信号as3传输到第一控制器ecu1的第二评估和控制单元10b。因此,两个控制器ecu1、ecu2的第二评估和控制单元10b、10c分别接收分配给第二车桥ha的车轮r2、r3的第二传感器元件df2和第三传感器元件df3的输出信号as2、as3。此外,两个评估和控制单元10b、10c准备第二传感器元件df2和第三传感器元件df3的输出信号as2、as3,其中第一控制器ecu1的第二评估和控制单元10b将准备好的输出信号aas2、aas3传输到第一控制器ecu1的第一计算单元3a用于评估。第二控制器ecu2的第二评估和控制单元10c将准备好的输出信号aas2、aas3传输到第二控制器ecu2的第二计算单元3b用于评估。两个计算单元3a、3b评估准备好的输出信号aas1、aas2、aas3、aas4以执行车辆的相应的至少一个制动功能。
29.当然,也可以与所示不同地交换所分配的传感器元件df1、df2、df3、df4的所接收的输出信号as1、as3;as2、as4。另外,在传感器总成1的未示出的替代实施例中,所分配的传感器元件df1、df2、df3、df4的所接收的输出信号as1、as3;as2、as4也可以附加地传输到至少一个另外的未示出的控制器。至少一个另外的控制器例如是被设计用于控制车辆1的电驱动器的逆变器的驱动控制器,或者是被设计用于计算运动轨迹的中央控制器。
30.传感器元件df1、df2、df3、df4分别检测至少一个物理参量,该物理参量表示与运动相关的测量变量和/或相应车轮r1、r2、r3、r4的另外的测量参量。在所示的实施例中,至少一个与运动相关的测量变量表示转数和旋转方向。当然,检测到的物理变量也可以表示另外的与运动相关的测量变量,例如转数。在所示的实施例中,相应车轮r1、r2、r3、r4的至少一个另外的测量变量表示传感器元件df1、df2、df3、df4附近的温度。当然,检测到的物理变量也可以表示另外的测量变量,例如轮胎压力或气隙信息。
31.在传感器总成1的所示实施例中,计算单元3a、3b基于准备好的输出信号aas1、aas2、aas3、aas4分别生成各个车轮r1、r2、r3、r4的测量数据,并且将其提供给数据总线5用于在车辆中分配。
32.用于车辆的根据本发明的传感器总成1的所描述的实施例,其检测车轮r1、r2、r3、r4的至少一个物理变量,优选地用在多回路制动系统中,特别是用于高度自动化或自动驾驶的车辆。这种多回路制动系统包括:多个未示出的车轮制动器,每个车轮制动器布置在车轮r1、r2、r3、r4上;主控制器psg,其基于检测到的车轮r1、r2、r3、r4的至少一个物理变量来执行车辆的至少一个制动功能;以及次级控制器ssg,其基于检测到的车轮r1、r2、r3、r4的至少一个物理变量执行车辆的至少一个制动功能。在此,第一控制器ecu1被设计为主控制器psg,并且第二控制器ecu2被设计为次级控制器ssg。
33.在此,主控制器psg可以控制esp系统或带有独立于真空的电液制动助力器的esp系统或集成的制动系统(ipb)。次级控制器ssg可以控制独立于真空的电液制动助力器或冗余制动单元。
34.主控制器psg和次级控制单元ssg实时地接收所分配的传感器元件df1、df2、df3、df4的输出信号as1、as3;as2、as4,用于进一步评估,用于执行相应的制动功能,或者用于在紧急情况下执行车辆的主稳定或当主稳定失败时执行车辆的次级稳定。为了执行相应的制
动功能和车辆的主稳定,主控制器psg控制相应的未详细示出的并且本身已知的主致动器,经由该主致动器可以在制动系统中建立压力,或在车轮制动中进行压力降低,并进行相应的控制和/或调节过程。为了执行相应的制动功能和车辆的次级稳定,次级控制器ssg控制相应的、未示出的、本身已知的次级致动器,通过该次级致动器可以在制动系统中中建立压力,或在车轮制动中进行压力降低,并进行相应的控制和/或调节过程。为了执行驻车制动功能,两个控制器ecu1、ecu2中的至少一个通过电连接与电动驻车制动器的未详细示出的对应致动器电连接。驻车制动功能的致动器优选布置在第二车桥ha或后桥的车轮r2、r3上。在传感器总成1的替代的未示出的实施例中,电动驻车制动器的致动器附加地或备选地布置在第一车桥va或前桥的车轮r1、r4上。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
