1.本发明属于医学教育培训技术领域,具体涉及一种腹腔镜手术训练器。
背景技术:
2.腹腔镜手术是一种通过小切口通道完成操作的微创手术,是现代外科治疗的重要手段。因具备创伤小、术后恢复快、美容效果好等优点,这项技术已经成功地应用在诸多的手术领域。然而,腹腔镜手术,特别是单孔腹腔镜手术,是一个复杂的手术过程,它改变了传统的手术操作方式,难度更大,所要求的技术储备更高,因此,大量的模拟训练必不可少。
3.现有的腹腔镜模拟器,主体结构是一个盒体,盒体内放置着供训练用的器具,采用该腹腔镜模拟器仅能够进行腹腔镜下基本操作的技能的练习,如单纯的腹腔镜下定位、夹持、传递及缝合打结等简单的训练,无法完整的模拟一个真实场景下手术操作的全过程,不便于操作者掌握腹腔镜手术的技巧。
技术实现要素:
4.本发明的目的是提供一种腹腔镜手术训练器,以模拟腹腔镜下完整手术操作的全过程,以解决背景技术提到的问题。
5.为达上述目的,本发明提供了一种腹腔镜手术训练器,包括中空箱体,所述中空箱体上侧设有安装口,所述安装口设有仿真皮肤,所述仿真皮肤上侧开设有若干操作孔,所述中空箱体的右侧插接有安装箱,所述暗装箱内设置有基板,所述基板上侧设置有仿真内脏模型组件、以及与仿真内脏模型组件连接有多组体液循环管路,每组体液循环管路均连接有体液输送装置。
6.进一步的,所述体液输送装置包括瓶体与对接座,所述瓶体固定于所述中空箱体的左侧,所述瓶体右侧设有出液管与进液管,所述出液管与进液管穿过所述中空箱体的左侧壁,所述对接座设有进液通道与出液通道,所述进液管的右端与所述进液通道左端连接,所述出液管的右端与所述出液通道左端连接,所述出液通道右端插接有对接头一,所述进液通道右端插接有对接头二,所述对接头一、对接头二均固定于所述安装箱的左侧,所述体液循环管路与所述对接头一、对接头二连接,所述瓶体内设有水泵,所述水泵出水口通过软管与所述出液管连接。
7.进一步的,所述安装箱左侧设有自锁组件。
8.进一步的,所述自锁组件包括基座,所述基座固定于所述中空箱体内侧的底部,所述基座上侧设有滑槽,所述滑槽内滑动连接有连接座,所述连接座的前端与所述滑槽之间固定连接有弹性件,所述连接座的后端设有按压杆,所述按压杆贯穿所述中空箱体侧壁,所述连接座右侧开设有若干连接槽,所述安装箱左侧固定连接有与连接槽对应的连接扣,所述连接扣卡合于所述连接槽。
9.进一步的,所述中空箱体外侧固定连接有风机,所述风机的出风口通过进风管与所述中空箱体内部连通。
10.进一步的,所述安装箱右侧向四周延伸有凸缘,所述凸缘与所述中空箱体之间设有密封垫。
11.进一步的,所述进液通道连接有液体压力传感器,所述液体压力传感器电连接有控制器,所述中空箱体外侧设有指示灯,且所述指示灯与所述控制器电连接。
12.进一步的,所述安装箱内设有滤水板,所述基板位于所述滤水板上侧,所述安装箱右侧设有排液管,所述排液管右端螺纹连接有堵头。
13.进一步的,所述仿真内脏模型组件包括仿真肾、仿真肝、仿真胃、仿真脾、仿真胆、仿真胆管、仿真胰腺、仿真十二指肠、仿真动脉、仿真静脉与仿真门静脉;所述体液循环管路为三组,所述仿真动脉、仿真静脉与仿真门静脉分别与对应的体液循环管路连接。
14.进一步的,所述仿真内脏模型组件基于病患医学数字成像数据通过3d打印机制作。
15.本发明的优点是:
16.1.本发明提供的这种腹腔镜手术训练器,与现有技术相比,通过设置的仿真内脏模型组件使得操作者对腹腔镜手术的感知更加真实,有利于提高操作者的训练效果,便于新手更快的掌握腹腔镜手术的技巧。
17.2.本发明提供的这种腹腔镜手术训练器,通过体液输送装置、体液循环管路与仿真内脏模型组件构成体液循环系统,在操作者进行腹腔镜手术训练时,若发生漏液的问题则说明操作失误,可直观的反应训练的成功率。
18.3.本发明提供的这种腹腔镜手术训练器,其仿真内脏模型组件是基于病患医学数字成像数据通过3d打印技术制作的,从而可以使得操作者对腹腔镜手术的感知更加真实,通过模拟与患者疾病相似的环境,使得操作者可以通过多次模拟腹腔镜手术,可以找到更加适合该患者的个体化手术方法以及手术操作步骤,能够达到术前反复模拟练习,进一步达到标准化操作流程,提高腹腔镜手术的成功率,而且便于初步学习者更快的学习腹腔镜手术技术。
19.下面结合附图和实施例对本发明做详细说明。
附图说明
20.图1是本发明的整体结构示意图。
21.图2是本发明的部分结构示意图。
22.图3是仿真内脏模型组件第一视角的结构示意图。
23.图4是仿真内脏模型组件第二视角的结构示意图。
24.图5是仿真动脉、仿真静脉与仿真门静脉相对位置的示意图。
25.图6是仿真动脉的示意图。
26.图7是仿真静脉的示意图。
27.图8是仿真门静脉的示意图。
28.图9是中空箱体的侧视图。
29.图10是中空箱体的内部结构示意图。
30.图11是安装箱的结构示意图。
31.图12是体液输送装置的部分结构示意图。
32.图13是自锁组件的结构示意图。
33.图14是弹性件的结构示意图。
34.附图标记说明:1、中空箱体;2、仿真皮肤;3、操作孔;4、安装箱;5、基板;6、仿真内脏模型组件;601、仿真肾;602、仿真肝;603、仿真胃;604、仿真脾;605、仿真胆;606、仿真胆管;607、仿真胰腺;608、仿真十二指肠;609、仿真动脉;610、仿真静脉;611、仿真门静脉;612、连接柱;7、体液循环管路;8、体液输送装置;801、瓶体;802、对接座;803、出液管;804、进液管;805、进液通道;806、出液通道;807、对接头一;808、对接头二;809、软管;810、水泵;9、自锁组件;901、基座;902、连接座;903、弹性件;9031、外管;9032、插杆;9033、弹簧;9034、限位杆;904、按压杆;905、连接槽;906、连接扣;10、风机;11、进风管;12、凸缘;13、密封垫;14、液体压力传感器;15、控制器;16、指示灯;17、滤水板;18、排液管;19、堵头;20、伸缩缸;21、底座;22、显示器;23、进风孔。
具体实施方式
35.为进一步阐述本发明达成预定目的所采取的技术手段及功效,以下结合附图及实施例对本发明的具体实施方式、结构特征及其功效,详细说明如下。
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
37.在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“垂直”、“水平”、“对齐”、“重叠”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
38.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征;在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
39.实施例1
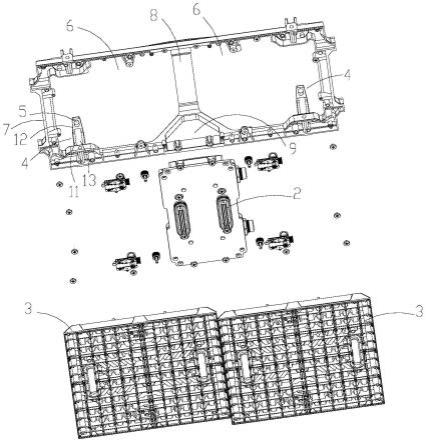
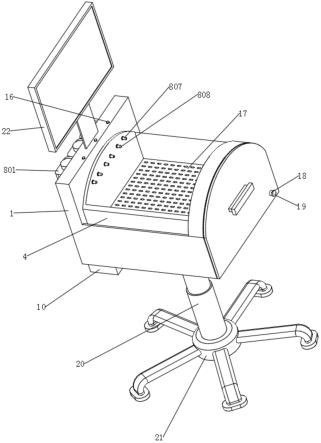
40.本实施例提供了一种如图1-图4所示的腹腔镜手术训练器,包括中空箱体1,中空箱体1上侧设有安装口,安装口设有硅胶材质的仿真皮肤2,仿真皮肤2上侧开设有若干操作孔3,具体的,操作孔3的数量为四个,其中一个操作孔3作为腹腔镜伸入的观察孔,其余三个操作孔3作为手术钳伸入的进入孔,中空箱体1的右侧插接有安装箱4,安装箱4的前后两侧均设置有长条形滑块,所述中空箱体1内侧固定有供滑块滑动的轨道,以便于安装箱4流畅的插入中空箱体1内,安装箱4内设置有基板5,基板5上侧设置有仿真内脏模型组件6、以及与仿真内脏模型组件6连接有多组体液循环管路7,每组体液循环管路7均连接有体液输送装置8。通过体液输送装置8、体液循环管路7与仿真内脏模型组件6构成体液循环系统,在操作者进行腹腔镜手术训练时,若发生漏液的问题则说明操作失误,可直观的反应训练的成功率。
41.具体的,仿真内脏模型组件6是基于病患医学数字成像数据通过3d打印机制作,能够达到等比例,个体化的模拟病变组织及与周围正常组织器官的关系,可以使得操作者对腹腔镜手术的感知更加真实,通过模拟与患者疾病相似的环境,使得操作者可以通过多次模拟腹腔镜手术,可以找到更加适合患者的手术方法,提高腹腔镜手术的成功率,而且便于初步学习者更快的学习腹腔镜手术。
42.进一步的,如图3-图8仿真内脏模型组件6包括仿真肾601、仿真肝602、仿真胃603、仿真脾604、仿真胆605、仿真胆管606、仿真胰腺607、仿真十二指肠608、仿真动脉609、仿真静脉610与仿真门静脉611;具体的,所述仿真肾601、仿真肝602、仿真胃603、仿真脾604、仿真胆605、仿真胆管606、仿真胰腺607、仿真十二指肠608、仿真动脉609、仿真静脉610与仿真门静脉611均为硅胶材质,所述仿真肾601、仿真肝602、仿真胃603、仿真脾604、仿真胆605、仿真胆管606、仿真胰腺607、仿真十二指肠608、仿真动脉609、仿真静脉610与仿真门静脉611的分布位置与人体器官分布位置一致,基板5上侧设置有多个连接柱612,所述仿真肾601、仿真肝602、仿真胃603、仿真脾604、仿真胆605通过套接的方式安装在连接柱612上,仿真肝602与仿真胆605一体设置,所述仿真胰腺607、仿真十二指肠608、仿真动脉609、仿真静脉610与仿真门静脉611放置于相应的位置,具体的,所述仿真胆管606与仿真胆605通过插接的方式进行连接,在仿真胆管606取石手术训练完成后,便于对仿真胆管606进行更换,同时,可以根据实际病例,更换特定的仿真胆管606,所述仿真胰腺607、仿真十二指肠608、仿真动脉609、仿真静脉610与仿真门静脉611可通过插接的方式与其它器官进行连接对自身位置进行固定,采用直接放置或插接的方便对各个器官进行更换;更为具体的,所述仿真动脉609、仿真静脉610与仿真门静脉611均为中空结构,体液循环管路7为三组,仿真动脉609、仿真静脉610与仿真门静脉611分别与对应的体液循环管路7相连通,通过体液输送装置8可以使得仿真动脉609、仿真静脉610、仿真门静脉611内形成体液循环。
43.进一步的,如图9-图12所示,体液输送装置8包括瓶体801与对接座802,瓶体801固定于中空箱体1的左侧,瓶体801右侧设有出液管803与进液管804,出液管803与进液管804穿过中空箱体1的左侧壁,对接座802设有进液通道805与出液通道806,进液管804的右端与进液通道805左端连接,出液管803的右端与出液通道806左端连接,出液通道806右端插接有对接头一807,进液通道805右端插接有对接头二808,对接头一807、对接头二808均固定于安装箱4的左侧,体液循环管路7与对接头一807、对接头二808连接,瓶体801内设有水泵810,水泵810出水口通过软管809与出液管803连接,水泵810用于将瓶体801内的体液通过体液循环管路7输送至仿真内脏模型组件6,使得仿真内脏模型组件6内形成体液循环回路,同时,水泵810可以将各管路体液的流速调节到与人体对应器官体液流速一致。对接头一807与对接头二808可以随着安装箱4移动,将安装箱4向右拉动时,对接头一807、对接头二808可以与进液通道805、出液通道806脱离,当再次将安装箱4插接于中空箱体1时,对接头一807、对接头二808可以自动与进液通道805、出液通道806对接。
44.进一步的,所述瓶体801为透明材料,瓶体801的侧壁上设置刻度,通过刻度可以观察到瓶体801内液体的剩余量。在使用时,通过刻度可观察到手术训练前后液体的多少,从而可以算出漏液的多少,进而可以根据漏液的液体量对操作者的手术的合格度进行评判。
45.进一步的,安装箱4左侧设有自锁组件9,当安装箱4插接于中空箱体1时,自锁组件9可以的安装箱4的位置进行锁定。
46.如图9、图11和图13所示,自锁组件9包括基座901,基座901固定于中空箱体1内侧的底部,基座901上侧设有滑槽,滑槽内滑动连接有连接座902,连接座902的前端与滑槽之间固定连接有弹性件903,连接座902的后端设有按压杆904,按压杆904贯穿中空箱体1侧壁,连接座902右侧开设有若干连接槽905,安装箱4左侧固定连接有与连接槽905对应的连接扣906,具体的,连接槽905的宽度与连接口的宽度相同,在弹性件903的作用下,连接扣906卡合于连接槽905。在拆卸安装箱4时,通过推动按压杆904即可带动连接座902滑动,当连接扣906的宽度位置与连接槽905的宽度位置向对应时,向右侧拉动安装箱4即可将安装箱4拆卸下来,拆卸下来后可以对仿真内脏模型组件6进行清洗或更换。
47.进一步的,如图14所示,所述弹性件903包括外管9031,所述外管9031一端插接有插杆9032,插杆9032与外管9031之间设置有弹簧9033,且外管9031内侧的底部固定连接有限位杆9034,通过限位杆9034可以对插杆9032的收缩位置进行限位。
48.进一步的,如图10所示,中空箱体1外侧固定连接有风机10,风机10的出风口通过进风管11与中空箱体1内部连通,更为具体的,安装箱4左侧设置有与进风管11对应的进风孔23。风机10可以对中空箱体1内吹气,使得中空箱体1内形成手术所需的气腹环境,使得在操作员训练时更加贴合实际手术的环境,在风机10工作时,自锁组件9可以防止安装箱4在气压的作用下滑出。
49.进一步的,如图1和图11所示,安装箱4右侧向四周延伸有凸缘12,凸缘12与中空箱体1之间设有密封垫13,该密封垫13为橡胶或硅胶材质,可以提高中空箱体1与安装箱4之间的密封效果,从而可以降低风机10的输出功率。
50.进一步的,如图1和图10所示,进液通道805连接有液体压力传感器14,用于检测流经液体通道的液体压力,液体压力传感器14电连接有控制器15,中空箱体1外侧设有指示灯16,且指示灯16与控制器15电连接,当进液通道805所在管路发生漏液时,液体压力传感器14检测到的压力低于设定值,控制器15控制对应的指示灯16亮起,以便于操作者观察到管路漏液。
51.进一步的,如图2所示,安装箱4内设有滤水板17,基板5放置于滤水板17上侧,安装箱4右侧设有排液管18,排液管18右端螺纹连接有堵头19。在仿真内脏模型组件6其中的含有体液回路的器官发生破损时,体液从滤水板17流至下方,在进行清洗时,直接用水在滤水板17上方清洗即可对仿真内脏模型组件6以及其它部件进行清洗,排放污水时将堵头19拆卸掉即可。
52.进一步的,中空箱体1上侧设有显示器22,在进行手术训练时,腹腔镜与该显示器22电连接,以便于操作者在训练中观看。
53.进一步的,如图1和图2所示,中空箱体1的下侧固定连接有伸缩缸20,具体的,所述伸缩缸20为电动伸缩缸20,伸缩缸20的下端固定连接有底座21,通过控制伸缩缸20伸缩可以对中空箱体1的高度进行调节,以便适用于不同身高的人群。
54.综上所述,该腹腔镜手术训练器与现有技术相比,该训练器可以使得操作者对腹腔镜手术的感知更加真实,通过模拟与患者疾病相似的环境,使得操作者可以通过多次模拟腹腔镜手术,可以找到更加适合患者的手术方法,提高腹腔镜手术的成功率,而且便于初步学习者更快的学习腹腔镜手术,便于新手更快的掌握腹腔镜手术的技巧;通过体液输送装置8、体液循环管路7与仿真内脏模型组件6构成体液循环系统,在操作者进行腹腔镜手术
训练时,若发生漏液的问题则说明操作失误,可直观的反应训练的成功率。
55.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。