1.本技术属于水下智能设备技术领域,更具体地说,是涉及一种水下运动机构及水下机器人。
背景技术:
2.水下机器人又称水下潜航器,是一种作业于水下的极限作业机器人,供于进行海底探索、调查、识别、打捞等作业,例如可供于进行海洋资源的探索和挖掘,包括海底矿产和海底石油。
3.现有技术中,水下机器人包括有水下自动机器人、遥控水下机器人和仿生水下机器人,这些现有机器人多采用被动式桨足,常见的被动式桨足多采用单个柔性关节。采用单个柔性关节的被动式桨足,其所产生的变形由该柔性关节的自身角度转换实现,而桨足由变形恢复至原形则依靠该柔性关节的角度复位实现。在桨足的运行中,为保证桨足的基本动力要求,柔性关节势必需进行较大的角度转换,此过程中,桨足的变形产生了回程角度。桨足由回程角度回程至初始角度,由于回程角度无法快速恢复,进而导致桨足的连续运行之间的时间间隔较大,大幅降低了机器人的游泳效率和速度,机器人亦无法快速地完成后退和侧向移动等步态。
4.另外,上述的现有水下机器人,桨足的被动关节刚度无法动态调整,不具有可变编程性,导致相同电机输入参数下机器人的输出动力不可改变,只能使用于单一的普通场景,而难以适用于复杂或狭小的作业环境。
技术实现要素:
5.本技术实施例的目的在于提供一种水下运动机构及水下机器人,以解决现有技术中存在的水下机器人由于游泳速率低、游泳步态简单并难以适应复杂作业环境的技术问题。
6.为实现上述目的,本技术采用的技术方案是:
7.提供一种水下运动机构,所述水下运动机构包括驱动机构和桨机构;
8.所述桨机构包括桨足本体和桨足调节件,所述桨足本体包括依次连接的至少两个桨片,任意相邻的两个桨片之间通过柔性结构连接;所述桨足本体具有相对设置的迎水面和背水面,所述背水面的朝向与所述水下运动机构的行进方向相反,所述桨足本体具有相对设置的桨根和桨尖;
9.所述桨足调节件设于所述背水面所在的一侧,并可相对所述桨足本体活动;所述桨足调节件的一端传动连接于所述驱动机构、与所述一端相对的另一端连接于所述桨尖,所述桨足调节件供于在所述驱动机构的驱动下,带动所述桨尖相对所述桨根发生角度转换,从而改变相邻两个所述桨片之间的柔性结构的刚度。
10.一实施例中,每个所述桨片的背水面均设有单滑道,由所述桨根指向所述桨尖的方向,所述至少两个桨片的单滑道依次连通形成联通滑道,所述桨足调节件滑动置于所述
联通滑道中;在所述驱动机构的驱动下,所述桨足调节件在所述联通滑道中往复滑动,从而带动所述桨尖相对所述桨根发生角度转换,进以改变各个所述柔性结构的刚度。
11.一实施例中,所述桨足调节件包括至少两个单调件,由所述桨根指向所述桨尖的方向,所述至少两个单调件依次连接,任意相邻两个所述单调件之间的角度可变,每个所述单滑道中均滑动设有一个所述单调件;
12.其中,相邻两个所述单调件之间的角度可变方向与相邻两个所述桨片之间的角度可变方向一致。
13.一实施例中,所述桨足调节件为柔性线结构,所述桨足调节件穿设于所述联通滑道中。
14.一实施例中,所述驱动机构包括驱动机、气缸机和气囊结构;
15.所述驱动机传动连接于所述气缸机的活塞部,所述气囊结构的一端连通于所述气缸机的缸体、与所述一端相对的另一端连接于所述桨足调节件,且所述一端指向所述另一端的方向与所述桨根指向所述桨尖的方向一致;
16.所述气缸机供于在所述驱动机的驱动下向所述气囊结构的内部充气或从所述气囊结构的内部抽吸气体,而使所述气囊结构的所述另一端远离或靠近所述一端,从而由所述另一端驱动所述桨足调节件带动所述桨尖相对所述桨根发生角度转换。
17.一实施例中,所述水下运动机构包括若干个所述桨机构,所述驱动机构包括若干个所述气缸机和若干个所述气囊结构;
18.所述驱动机与若干个所述活塞部分别传动连接,若干个所述气囊结构的所述一端分别对应连通于若干个所述气缸机,若干个所述气囊结构的所述另一端分别对应连接于若干个所述桨足调节件。
19.一实施例中,所述驱动机构还包括驱动齿轮、驱动杆和连接杆;
20.所述驱动机的驱动轴和所述驱动齿轮同轴连接,所述驱动杆设有啮合齿结构,所述驱动齿轮和所述驱动杆二者的啮合齿结构相互啮合,所述驱动杆和所述连接杆垂直连接,若干个所述活塞部沿所述连接杆的长度方向依次布列并分别连接于所述连接杆。
21.一实施例中,任意相邻的两个桨片中,在其所述迎水面均设有抵接结构;在所述桨足本体处于展平状态时,任意相邻的两个所述桨片上的所述抵接结构均相抵,供于阻止所述桨足本体沿所述背水面指向所述迎水面的方向发生角度转换。
22.一实施例中,所述桨机构还包括柔性胶膜,所述柔性胶膜贴合于所述背水面上,并与各个所述桨片均相抵贴。
23.一实施例中,所述桨足本体包括依次连接的至少三个桨片,任意相邻的两个桨片之间通过可折弯的柔性结构连接。
24.本技术提供的水下运动机构的有益效果在于:
25.与现有技术相比,本技术提供的水下运动机构,其桨机构中的桨足调节件设于桨足本体的背水面所在的一侧,并能够相对桨足本体活动。桨足调节件的一端传动连接于驱动机构,桨足调节件上与一端相对的另一端连接于桨足本体的桨尖,桨足本体的桨根供于连接水下机器人的其他部件。在驱动机构的驱动下,桨足调节件相对桨足本体活动,并带动桨尖相对桨根发生角度转换,则相邻桨片之间的角度发生转换,相邻桨片之间的柔性关节的刚度发生改变,桨足本体的整体形态发生改变。其中,桨尖相对桨根的位置可保持设定的
时间,从而使桨足本体的形态保持设定的时间,在该时间内柔性关节保持一定的刚度。或者,桨尖相对桨根的角度保持不断变化,从而使桨足本体的形态不断发生变化,柔性关节的刚度随其形态发生变化。
26.如此,通过驱动机构和桨足调节件灵活调节桨足本体形态和柔性关节的刚度,最大程度改进桨尖相对桨根的角度,使桨足本体在当前场景下处于最佳形态,使柔性关节在当前场景下处于最佳刚度,进而有效保证其运行的速率和步态,提高其运动的灵活性,同时通过驱动机构和桨足调节件的调节,减小桨足本体的回程阻力。将本技术提供的水下运动机构应用于水下机器人,则在多个桨机构协作的基础上,可增加机器人步态的多样性,例如可进行前进、后退、左右侧向移动、横滚、俯仰、转弯等步态,更有利于机器人在狭小或复杂的环境中作业。
27.本技术的另一目的还在于提供一种水下机器人,所述水下机器人包括机壳,以及如上所述的水下运动机构;
28.所述水下运动机构的驱动机构设于所述机壳的内部,所述机壳具有分设于其行进方向两侧的侧方位,所述桨机构设于所述侧方位上,所述桨机构的桨根临近所述机壳,所述桨机构的桨尖远离所述机壳。
29.一实施例中,所述水下运动机构包括沿所述机壳的行进方向间隔开的两对所述桨机构;在每一对所述桨机构中,一个所述桨机构设于所述机壳的一个所述侧方位上,另一所述桨机构设于所述机壳的另一所述侧方位上;
30.所述水下机器人还包括设于所述机壳内部的两个驱动链,每个所述驱动链均具有两个输出端;其中,一个所述驱动链的两个输出端分别连接于一对所述桨机构中的两个桨足本体,另一所述驱动链的两个输出端分别连接于另一对所述桨机构中的两个桨足本体,所述驱动机构与两对所述桨机构中的所有桨足调节件分别传动连接。
31.一实施例中,所述驱动链包括第一驱动件和两个第二驱动件,所述第一驱动件设于所述机壳沿行进方向延伸的中轴线上,两个所述第二驱动件分设于所述中轴线的两侧;
32.所述第一驱动件的驱动轴线和所述中轴线垂直,所述第一驱动件和两个所述第二驱动件分别传动连接,供于驱动所述第二驱动件同轴转动;所述第二驱动件的驱动轴线和所述中轴线平行,两个所述第二驱动件和一对所述桨机构中的两个桨足本体分别传动连接,供于驱动所述桨足本体以所述第二驱动件的驱动轴线为中心进行摆动。
33.一实施例中,所述驱动链还包括主副连接件,所述主副连接件包括连接部和两个转动部,所述连接部具有沿所述第一驱动件的驱动轴线相对的两个端部,两个所述转动部分别连接于所述两个端部;
34.所述第一驱动件的驱动端朝向一个所述第二驱动件且背离另一个所述第二驱动件,一个所述转动部连接于所述驱动端,另一个所述转动部连接于另一个所述第二驱动件;所述驱动端和一个所述第二驱动件同轴连接,所述驱动端通过所述主副连接件驱动另一个所述第二驱动件同轴转动。
35.一实施例中,所述驱动链还包括桨足连接件,所述桨足连接件包括基体部和两个第一摆动部,以及第二摆动部;所述基体部具有沿所述第二驱动件的驱动轴线相对的两个端部,两个所述第一摆动部分别连接于所述两个端部,所述第二摆动部与位于所述两个端部之间的所述基体部连接;
36.所述第二驱动件具有相对设置的两个驱动端,两个所述第一摆动部分别同轴连接于两个所述驱动端,所述桨根连接于所述第二摆动部。
37.一实施例中,所述机壳包括上壳体和下壳体,所述上壳体和所述下壳体朝向彼此的一侧均设有收容腔,且二者的收容腔的敞口正对且并合设置;
38.所述水下机器人还包括电控组件,所述电控组件设于所述上壳体的收容腔的底部,所述驱动机构设于所述下壳体的收容腔的底部;两个所述驱动链的一部分收容于所述上壳体的收容腔内、另一部分收容于所述下壳体的收容腔内;其中,所述电控组件与所述驱动链和所述驱动机构分别电性连接。
39.本技术提供的水下机器人的有益效果在于:
40.与现有技术相比,本技术提供的水下机器人,应用有本技术提供的水下运动机构。水下运动机构中的驱动机构设于机器人的机壳内部,桨机构设于机壳的侧方位上,桨机构的桨根临近机壳,桨机构的桨尖远离机壳。其中,在驱动机构的驱动下,桨尖相对桨根的角度可变,从而柔性关节的刚度随其角度发生变化,进以使桨足本体在当前场景下处于最佳形态,使柔性关节在当前场景下处于最佳刚度。
41.从而,通过驱动机构和桨足调节件灵活调节柔性关节的刚度,以提高其运动的灵活性,进以使本技术提供的水下机器人,可在多个桨机构协作的基础上,增加机器人步态的多样性,例如可进行前进、后退、左右侧向移动、横滚、俯仰、转弯等步态,更有利于机器人在狭小或复杂的环境中作业。
附图说明
42.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
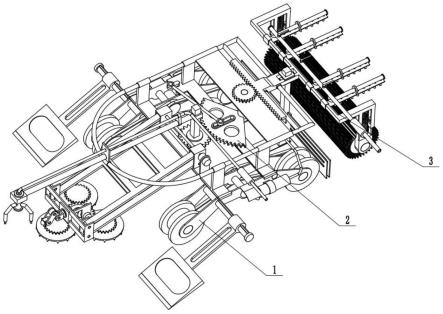
43.图1为本技术实施例提供的水下机器人的示意图;
44.图2为本技术实施例提供的上壳体、电控组件、驱动链、固定座的拆分示意图;
45.图3为本技术实施例提供的上壳体、电控组件、驱动链、固定座的组装示意图;
46.图4为本技术实施例提供的下壳体、驱动机构的拆分示意图;
47.图5为本技术实施例提供的下壳体、驱动机构的组装示意图;
48.图6为本技术实施例提供的第二驱动件、桨足连接件、桨足机构的拆分示意图;
49.图7为本技术实施例提供的桨足机构的拆分示意图。
50.其中,图中各附图标记:
51.10、机壳;20、电控组件;30、驱动链;40、驱动机构;50、桨机构;101、上壳体;102、下壳体;103、固定座;201、控制板;202、电池;203、密封层;301、第一驱动件;302、主副连接件;303、第二驱动件;304、桨足连接件;302a、连接部;302b、转动部;304a、基体部;304b、第一摆动部;304c、第二摆动部;401、驱动机;402、驱动齿轮;403、驱动杆;404、连接杆;405、气缸机;406、气囊结构;407、导向座;405a、活塞部;405b、缸体;501、桨足本体;502、桨足调节件;503、柔性胶膜;501a、桨片;501b、柔性结构;501c、单滑道;501d、抵接结构;502a、单调件;a、迎水面;b、背水面;c、桨根;d、桨尖。
具体实施方式
52.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
53.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
54.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
55.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
56.请一并参阅图1至图7,现对本技术实施例提供的水下运动机构及水下机器人进行说明。
57.请参阅图4至图7所示,本技术实施例提供的水下运动机构包括驱动机构40和桨机构50。该水下运动机构适用于水下智能设备,尤其适用于水下机器人,其中的驱动机构40优选设于水下智能设备的机壳10内部,桨机构50设于机壳10的侧方位上,供于通过与水之间的相互作用力而驱动智能设备沿行进方向前行。
58.本实施例中,桨机构50包括桨足本体501和桨足调节件502,桨足本体501包括依次连接的至少两个桨片501a,任意相邻的两个桨片501a之间通过柔性结构501b连接。桨足本体501具有相对设置的迎水面a和背水面b,其中迎水面a的朝向与运动机构的行进方向一致,背水面b的朝向与运动机构的行进方向相反。桨足本体501具有相对设置的桨根c和桨尖d,将运动机构应用于水下机器人,桨根c临近于机器人的机壳10,也就是说,桨根c临近于驱动机构40,而桨尖d远离机壳10,位于整个桨机构50的末端位置。
59.桨足调节件502设于背水面b所在的一侧,并设置为可相对桨足本体501活动。桨足调节件502的一端传动连接于驱动机构40、与一端相对的另一端连接于桨尖d。桨足调节件502供于在驱动机构40的驱动下,带动桨尖d相对桨根c发生角度转换,从而改变相邻两个所述桨片501a之间的柔性结构501b的刚度。
60.与现有技术相比,本实施例提供的水下运动机构,在驱动机构40的驱动下,桨足调节件502相对桨足本体501活动,并带动桨尖d相对桨根c发生角度转换,则相邻桨片501a之间的角度发生转换,相邻桨片501a之间的柔性关节的刚度发生改变,桨足本体501的整体形态发生改变。其中,桨尖d相对桨根c的位置可保持设定的时间,从而使桨足本体501的形态保持设定的时间,在该时间内柔性关节保持一定的刚度。或者,桨尖d相对桨根c的角度保持不断变化,从而使桨足本体501的形态不断发生变化,柔性关节的刚度随其形态发生变化。
61.如此,通过驱动机构40和桨足调节件502灵活调节桨足本体501形态和柔性关节的刚度,在桨机构50的运行行程中,最大程度改进桨尖d相对桨根c的位置或角度,使桨足本体
501在当前场景下处于最佳形态,使柔性关节在当前场景下处于最佳刚度,进而有效保证运行行程的速率和步态,提高其运动的灵活性,同时通过驱动机构40和桨足调节件502的调节,减小桨足本体501的回程阻力。将本技术提供的水下运动机构应用于水下机器人,则在多个桨机构50协作的基础上,可增加机器人步态的多样性,例如可进行前进、后退、左右侧向移动、横滚、俯仰、转弯等步态,更有利于机器人在狭小或复杂的环境中作业。
62.如图6和图7所示,一实施例中,优选桨足本体501包括依次连接的至少三个桨片501a,相邻两个桨片501a之间的柔性结构501b作为一个柔性关节,则桨足本体501具有至少两个柔性关节,区别于现有技术中常用的单个柔性关节。桨足本体501具有两个或两个以上的柔性关节,则桨足本体501所能够变换的形态越多,尤其在狭小和复杂的环境中,通过驱动机构40和桨足调节件502的调节,将各个柔性关节的刚度分别确定在一个确定的程度,则桨足本体501可处于并保持在最大程度的收拢状态,以在狭小的环境中作业或通过狭小的通道,或者在复杂的环境中不断变换收拢程度而保持作业或通过复杂的通道。
63.当然,上述的桨足本体501也可仅包括两个互柔性连接的桨片501a,也就是说,桨足本体501具有一个柔性关节,相比于优选的两个或两个柔性关节,一个柔性关节限制桨足本体501的可变换形态,具有一个柔性关节的桨足本体501可适用于较普通的作业环境中。但是,相比于现有技术中所使用的一个柔性关节,本实施例所提供的一个柔性关节的刚度可变,且可根据具体场景设置其刚度的可变程度,以使其适用于普通场景中的不同需求。
64.一实施例中,任意相邻的两个桨片501a之间通过可折弯的柔性结构501b互连接。例如,可折弯的柔性结构501b具有从平展的状态转换至具有直角的状态,或者从具有直角的状态转换至平展的状态,并可处于两个状态之间的任意角度上。
65.如图7所示,一实施例中,每个桨片501a的背水面b均设有单滑道501c,由桨根c指向桨尖d的方向,至少两个桨片501a的单滑道501c依次连通形成联通滑道,桨足调节件502滑动置于联通滑道中;在驱动机构40的驱动下,桨足调节件502在联通滑道中往复滑动,从而带动桨尖d相对桨根c发生角度转换。
66.由于每个桨片501a的背水面b均设有单滑道501c,而桨足调节件502滑动置于由各个单滑道501c互连通的联通滑道中,亦即桨足调节件502的活动关联到每个桨片501a上。当桨足调节件502相对桨足本体501活动时,桨足调节件502的活动可通过桨尖d带动每个桨片501a与与之相邻的桨片501a发生角度转换,进而改变桨足本体501中所有柔性结构501b的刚度,使桨足本体501的形态变换更加灵活,更有利于桨机构50适用于多种不同的作业环境。
67.在一个具体实施例中,桨足调节件502包括至少两个单调件502a,优选单调件502a的数量和桨片501a的数量相同,由桨根c指向桨尖d的方向,至少两个单调件502a依次连接,任意相邻两个单调件502a之间的角度可变,每个单滑道501c中均滑动设有一个单调件502a;其中,相邻两个单调件502a之间的角度可变方向与相邻两个桨片501a之间的角度可变方向一致。
68.本实施例中,每个单调件502a沿其滑动方向的延伸尺寸小于与之对应的桨片501a的延伸尺寸,在驱动机构40的驱动下,每个单调件502a分别相对与之对应的桨片501a滑动,整个桨足调节件502相对桨足本体501整体滑动,桨足调节件502的另一端通过桨尖d依次带动每个桨片501a发生角度转换,该角度可趋于变大或趋于变小,与之相对应地,桨足本体
501的形态趋于平展或趋于收拢。
69.本实施例中,任意相邻的两个单调件502a之间的角度可变,相邻两个单调件502a之间可互相铰接,或者相邻两个单调件502a之间通过可折弯的柔性结构501b连接。优选地,相邻两个单调件502a之间的柔性结构501b和相邻两个桨片501a之间的柔性结构501b相同。在一个方面,相邻两个单调件502a之间和相邻两个桨片501a之间均通过可折弯的柔性结构501b连接,可提高桨足本体501在一个形态下保持特定刚度的能力;另一方面,采用可折弯的柔性结构501b,而不采用胶接结构,可简化桨足调节件502的复杂程度,使桨机构50的结构简单化。
70.在另一个实施例中,每个桨片501a上的单滑道501c均为管通道型,多个单滑道501c依次连通形成管通道型的联通滑道,桨足调节件502为柔性线结构,该柔性线结构穿设于联通滑道中。在驱动机构40的驱动下,柔性线结构相对桨足本体501整体滑动,柔性线结构的另一端通过桨尖d依次带动每个桨片501a发生角度转换,该角度可趋于变大或趋于变小,与之相对应地,桨足本体501的形态趋于平展或趋于收拢。其中,柔性线结构可为弹性线或非弹性线。
71.如图3、图4和图6所示,一实施例中,驱动机构40包括驱动机401、气缸机405和气囊结构406;驱动机401传动连接于气缸机405的活塞部405a,气囊结构406的一端连通于气缸机405的缸体405b、与一端相对的另一端连接于桨足调节件502,且一端指向另一端的方向与桨根c指向桨尖d的方向一致;气缸机405供于在驱动机401的驱动下向气囊结构406的内部充气或从气囊结构406的内部抽吸气体,而使气囊结构406的另一端远离或靠近一端,从而由另一端驱动桨足调节件502带动桨尖d相对桨根c发生角度转换。
72.本实施例中,气囊结构406的结构壁设置为由其一端延伸至另一端的折叠结构。在驱动机401的驱动下向气囊结构406的内部不断充气时,气囊结构406的另一端随折叠结构的不断延展而远离气囊结构406的一端,在驱动机401的驱动下从气囊结构406的内部抽吸气体时,气囊结构406的另一端随折叠结构的不断压叠而靠近气囊结构406的一端,进以通过气囊结构406的另一端带动桨足调节件502相对桨足本体501滑动,桨足调节件502带动桨尖d相对桨根c发生角度转换。
73.优选地,桨足调节件502和气囊结构406的另一端之间采用绳线连接,该绳线可具有弹性或不具有弹性,优选该绳线不具有弹性,以保证气囊结构406对桨足调节件502的驱动灵敏性。优选地,桨足调节件502和桨尖d之间采用绳线连接,该绳线可具有弹性或不具有弹性,优选该绳线具有弹性,以保证桨足调节件502对桨尖d的带动灵敏性。
74.基于上述驱动机构40的设置,在一个实施例中,水下运动机构包括若干个桨机构50,驱动机构40包括若干个气缸机405和若干个气囊结构406;驱动机401与若干个活塞部405a分别传动连接,若干个气囊结构406的一端分别对应连通于若干个气缸机405,若干个气囊结构406的另一端分别对应连接于若干个桨足调节件502。如此,通过一个驱动机401驱动若干个桨足调节件502,以保证若干个桨足本体501在同一作业环境下的同时变换统一的形态。
75.其他实施例中,也可采用单独的桨足调节件502由单独的驱动机401驱动,例如通过直线驱动机401和直线伸缩件的结合驱动单独的桨足调节件502,但由于受限于水下机器人的空间结构,以及控制流程的设计,优选采用一个驱动机401驱动和控制所有的桨足调节
件502。
76.一具体实施例中,驱动机构40还包括驱动齿轮402、驱动杆403和连接杆404;驱动机401的驱动轴和驱动齿轮402同轴连接,驱动杆403上靠近一端的区域设有啮合齿结构,驱动齿轮402和驱动杆403二者的啮合齿结构相互啮合,以将驱动机401的旋转运动转换为驱动杆403的直线运动,驱动杆403的另一端和连接杆404垂直连接,若干个活塞部405a设于连接杆404的背离驱动杆403的一侧,若干个活塞部405a沿连接杆404的长度方向依次布列并分别连接于连接杆404,由驱动杆403的直线往复运动驱动连接杆404带动活塞部405a相对气缸机405的缸体405b往复运动,以向气囊结构406内充气或从气囊结构406内抽吸气体。
77.本具体实施例中,驱动机构40还包括一导向座407,该导向座407供于滑动安装上述的驱动杆403,驱动机401通过齿轮驱动驱动杆403相对导向座407滑动,导向座407供于向驱动杆403提供稳定的导向作用。其中,导向座407可优选固定安装于机器人机壳10的内部。
78.如图6和图7所示,一实施例中,任意相邻的两个桨片501a中,在其迎水面a均设有抵接结构501d;在桨足本体501处于展平状态时,任意相邻的两个桨片501a上的抵接结构501d均相抵,供于阻止桨足本体501沿背水面b指向迎水面a的方向发生角度转换。在桨足本体501的运行阶段,通过抵接结构501d的相抵,使桨足本体501保持展平状态。具体地,在运行阶段,当桨足本体501展开至展平状态时,各相邻抵接结构501d的相抵,使各桨片501a不再继续转动,从而实现对桨足本体501进行限位,以使桨足本体501持续保持在展平状态下。
79.一实施例中,桨机构50还包括柔性胶膜503,柔性胶膜503贴合于背水面b上,并与各个桨片501a均相抵贴,在桨足本体501的运行阶段,通过拉扯柔性胶膜503使桨足本体501保持展平状态。具体地,在运行阶段,当桨足本体501展开至展平状态时,柔性胶膜503拉扯各桨片501a不再继续转动,从而实现对桨足本体501进行限位,以使桨足本体501持续保持在展平状态下。
80.需要说明的,柔性胶膜503具有较高的拉伸强度及较好的弯曲性能,即柔性胶膜503具有预设的拉伸强度及预设的弯曲载荷。在运行阶段,由于柔性胶膜503具有较高拉伸强度,当桨足本体501展开至展平状态时,柔性胶膜503拉扯各桨片501a不再继续转动,从而实现对桨足本体501进行限位,以使桨足本体501持续保持在展平状态下,使桨足本体501近似为处于平展状态的刚性结构,有利于保证桨足本体501的推力。而在回程阶段,由于柔性胶膜503易弯曲形变,对各桨片501a的反向转动时造成的阻力较小,能够使桨足本体501快速收拢,进而减少桨足本体501的回程阻力。
81.如图1至图3所示,本技术实施例的另一目的还在于提供一种水下机器人,水下机器人包括机壳10,以及如上的水下运动机构。具体地,水下运动机构的驱动机构40设于机壳10的内部,机壳10具有分设于其行进方向两侧的侧方位,桨机构50设于侧方位上,桨机构50的桨根c临近机壳10,桨机构50的桨尖d远离机壳10。
82.与现有技术相比,本技术实施例提供的水下机器人,应用有本技术提供的水下运动机构。水下运动机构中的驱动机构40设于机器人的机壳10内部,桨机构50设于机壳10的侧方位上,桨机构50的桨根c临近机壳10,桨机构50的桨尖d远离机壳10。其中,在驱动机构40的驱动下,桨尖d相对桨根c的角度可变,从而柔性关节的刚度随其角度发生变化,进以使桨足本体501在当前场景下处于最佳形态,使柔性关节在当前场景下处于最佳刚度。
83.从而,通过驱动机构40和桨足调节件502灵活调节柔性关节的刚度,以提高其运动
的灵活性,进以使本技术提供的水下机器人,可在多个桨机构50协作的基础上,增加机器人步态的多样性,例如可进行前进、后退、左右侧向移动、横滚、俯仰、转弯等步态,更有利于机器人在狭小或复杂的环境中作业。
84.如图2和图3所示,一实施例中,水下运动机构包括沿机壳10的行进方向间隔开的两对桨机构50;在每一对桨机构50中,一个桨机构50设于机壳10的一个侧方位上,另一桨机构50设于机壳10的另一侧方位上;水下机器人还包括设于机壳10内部的两个驱动链30,每个驱动链30均具有两个输出端;其中,一个驱动链30的两个输出端分别连接于一对桨机构50中的两个桨足本体501,另一驱动链30的两个输出端分别连接于另一对桨机构50中的两个桨足本体501,驱动机构40与两对桨机构50中的所有桨足调节件502分别传动连接。
85.本实施例中,每一个桨机构50中的桨足本体501均采用不同的输出端驱动,每一个桨足本体501可独立控制,每一个桨足本体501可自由调控其整体相对于机壳10的角度,进而在同一作业环境下,可根据每一个桨机构50所在的方位不同而自由调控该桨机构50,使得4个桨机构50相互协作,以最佳的游泳形态适于当前的环境。
86.一具体实施例中,驱动链30包括第一驱动件301和两个第二驱动件303,第一驱动件301设于机壳10沿行进方向延伸的中轴线上,两个驱动链30中的两个第一驱动件301沿机器人的行进方向间隔开,每一个驱动链30中的两个第二驱动件303均分设于中轴线的两侧。在同一个驱动链30中,第一驱动件301的驱动轴线和中轴线垂直,第一驱动件301和两个第二驱动件303分别传动连接,供于驱动第二驱动件303同轴转动;第二驱动件303的驱动轴线和中轴线平行,两个第二驱动件303和一对桨机构50中的两个桨足本体501分别传动连接,供于驱动桨足本体501以第二驱动件303的驱动轴线为中心进行摆动。
87.在作业过程中,第一驱动件301同步驱动两个第二驱动件303转动,两个第二驱动件303带动一对桨机构50中的两个桨足本体501同步同轴转动。同步地,第二驱动件303还带动桨机构50中的桨足本体501以其驱动轴线为中心进行摆动,如此,桨足本体501在以第一驱动件301的驱动轴线为中心进行转动的同时,也以第二驱动件303的驱动轴线为中心进行摆动。不同的是,4个桨足机构分别由4个第二驱动件303驱动,4个桨足机构的摆动角度和摆动方向可独立控制。在同一作业环境下,可根据每一个桨机构50所在的方位不同而自由调控该桨机构50的摆动角度和方向,使得4个桨机构50相互协作,以最佳的游泳形态适于当前的环境。
88.一具体实施例中,驱动链30还包括主副连接件302,主副连接件302包括连接部302a和两个转动部302b,连接部302a呈杆状,连接部302a具有沿第一驱动件301的驱动轴线相对的两个端部,两个转动部302b分别连接于两个端部。其中,每个转动部302b均包括两个半弧形结构。
89.在一个转动部302b中,一个半弧形结构以第一驱动件301的驱动轴线为中心,同轴固定连接于第一驱动件301的驱动端上,另一个半弧形结构设于该一个半弧形结构的外侧,且其一端连接于该一个半弧形结构的中点位置,连接部302a的其中一端固定连接于该另一个半弧形结构的中点位置。
90.在另一个转动部302b中,一个半弧形结构以第一驱动件301的驱动轴线为中心,同轴固定连接于第二驱动件303的壳体上,另一个半弧形结构设于该一个半弧形结构的外侧,且其一端连接于该一个半弧形结构的中点位置,连接部302a的另一个端固定连接于该另一
个半弧形结构的中点位置。
91.其中,第一驱动件301的驱动端朝向一个第二驱动件303且背离另一个第二驱动件303,一个转动部302b连接于驱动端,另一个转动部302b连接于另一个第二驱动件303;驱动端和一个第二驱动件303同轴连接,驱动端通过主副连接件302驱动另一个第二驱动件303同轴转动,如此通过同一个第一驱动件301驱动位于其两侧的两个第二驱动件303同步转动。
92.一具体实施例中,驱动链30还包括桨足连接件304,桨足连接件304包括基体部304a和两个第一摆动部304b,以及第二摆动部304c。其中,基体部304a呈杆状,基体部304a具有沿第二驱动件303的驱动轴线相对的两个端部,两个第一摆动部304b均呈半弧形结构,两个第一摆动部304b分别连接于两个端部,第二摆动部304c与位于两个端部之间的基体部304a连接。第二驱动件303具有相对设置的两个驱动端,两个第一摆动部304b分别同轴连接于两个驱动端,而桨足本体501的桨根c连接于第二摆动部304c。其中,第一摆动部304b和第二摆动部304c设于基体部304a的相对的两个侧方。
93.一实施例中,机壳10包括上壳体101和下壳体102,上壳体101和下壳体102朝向彼此的一侧均设有收容腔,且二者的收容腔的敞口正对且并合设置。水下机器人还包括电控组件20,电控组件20设于上壳体101的收容腔的底部,驱动机构40设于下壳体102的收容腔的底部;两个驱动链30的一部分收容于上壳体101的收容腔内、另一部分收容于下壳体102的收容腔内;其中,电控组件20与驱动链30和驱动机构40分别电性连接。
94.具体地,电控组件20包括控制板201、电池202和密封舱,控制板201和电池202均密封安装于密封舱内。电池202与控制板201电性连接,控制板201与第一驱动件301、第二驱动件303、驱动机构40分别电性连接。更为具体地,控制板201为pcb板,控制板201上设置有cpg(central pattern generator,中央模式发生器)、imu(inertial measurement unit,惯性测量单元)及pid控制器(proportion integration differentiation.比例-积分-微分控制器)。可以理解地,在控制水下机器人运动时,采用cpg控制方法,可以柔顺的进行步态切换,同时搭配惯性测量单元(inertial measurementunit,简称imu)进行实时位姿检测,即时刻检测机器人运行状态,并采用pid控制实现闭环,可准确的进行位姿反馈,及时调整误差。
95.一实施例中,所述机壳10还包括固定座103,所述固定座103的结构适配于两个第一驱动件301,所述固定座103具有能够收容两个第一驱动件301的两个座腔,两个第一驱动件301均收容于两个座腔内,且该固定座103固定连接于上壳体101,由两个驱动链30和该座腔构成的总成被收容于上壳体101和下壳体102并合而构成的总收容腔内。
96.需要说明的是,机壳10上位于两个侧方位的侧壁开设有开放口,该开放口供于裸露驱动链30的输出端,供于将驱动链30的动力传动连接至桨机构50的桨足本体501。
97.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。