1.本发明涉及核电设备检修领域,尤其涉及一种核电厂定位销水下收集机器人。
背景技术:
2.核电站需定期对堆内构件等设备进行大修检查,其中一项重要工作是对上部堆内构件进行检修,上部堆内构件检修过程中如发现燃料组件定位产生裂纹等缺陷或发生弯曲,则需对定位销进行更换。
3.因长期与燃料组件近距离接触,上部堆内构件表面辐照剂量很高,因此上部堆内构件检修时放置在构件池内的支撑架上,整个设备处于水下,以避免对人员或其他设备造成伤害。因此,上部堆内构件燃料组件定位销更换工作也必须在水下进行。
4.目前国内尚无堆内构件燃料组件定位销水下更换设备的研究,国外电站曾采用定位销底部切割、上部残留定位销保留的工艺方案进行定位销更换。但因国内电站上部堆内构件与国外电站设备结构差异,残留定位销将在堆芯形成异物,危害燃料组件安全,因此在更换定位销时必须将原定位销上部残留部分取出并进行收集。
技术实现要素:
5.本发明要解决的技术问题在于,提供一种核电厂定位销水下收集机器人。
6.本发明解决其技术问题所采用的技术方案是:构造一种核电厂定位销水下收集机器人,其包括车体、与所述车体连接的升降机构、设于所述升降机构上端的旋转平台机构以及设于所述旋转平台机构上端的执行机构;
7.所述升降机构用于带动所述旋转平台机构以及所述执行机构进行上下移动;
8.所述旋转平台机构用于带动所述执行机构进行x轴方向移动、y轴方向移动或者旋转运动;
9.所述执行机构包括与所述旋转平台机构连接的固定座、设于所述固定座上的顶升收集组件以及用于夹取定位销并将所述定位销投放至所述顶升收集组件的夹持组件。
10.在一些实施例中,所述夹持组件包括第一滑轨、第一定位板、第二滑轨、第二定位板以及夹爪组件;
11.所述第一定位板通过所述第一滑轨与所述固定座可移动连接;
12.所述第二定位板通过所述第二滑轨与所述第一定位板可移动连接;
13.所述夹爪组件设于所述第二定位板上用于夹取定位销。
14.在一些实施例中,所述夹爪组件包括定位座、转动杆、过渡座、夹爪以及转杆驱动装置;
15.所述转动杆通过安装于所述定位座与所述第二定位板连接;
16.所述夹爪通过所述过渡座与所述转动杆连接;
17.所述转杆驱动装置设于所述第二定位板上通过锥齿轮与所述转动杆传动连接从而驱使所述夹爪旋转。
18.在一些实施例中,所述顶升收集组件包括驱动缸、连接板、顶杆以及收集盒;
19.所述驱动缸设于所述固定座的上端;
20.所述顶杆与所述驱动缸可移动连接;
21.所述收集盒通过连接板设于所述驱动缸的上端面。
22.在一些实施例中,所述固定座上还设有用于对整体环境进行观察的全景相机;
23.所述全景相机包括第一云台、与所述第一云台连接的第二云台以及设于所述第二云台上的相机本体;
24.所述第一云台用于带动所述相机本体进行360度旋转;
25.所述第二云台用于带动所述相机本体进行上仰和下俯。
26.在一些实施例中,所述固定座上还设有用于对定位销进行定位的定位相机。
27.在一些实施例中,所述车体为一体式密封箱体,其包括若干车板,若干所述车板通过焊接连接形成所述车体。
28.在一些实施例中,所述车体中设有控制组件,所述控制组件包括驱动电机、与所述驱动电机连接的减速机、控制元件以及用于获取所述核电厂定位销水下收集机器人工作状况的下位机。
29.在一些实施例中,还包括行走机构,所述行走机构包括与所述减速机连接的行走轮以及与所述行走轮连接的履带;
30.所述减速机通过穿设于所述车体的输出轴与所述行走轮连接,从而驱动所述行走轮带动所述履带移动。
31.在一些实施例中,所述升降机构包括设于所述车体和所述旋转平台机构之间的若干导柱,若干所述导柱外周套均设有弹簧。
32.在一些实施例中,所述旋转平台机构包括旋转层组件、设于所述旋转层组件上的x移动层组件以及设于所述x移动层组件上的y移动层组件。
33.在一些实施例中,所述旋转层组件包括与若干所述导柱连接的第一底板,设于所述第一底板上的旋转座以及设于所述第一底板和所述x移动层组件之间的支撑座。
34.在一些实施例中,所述x移动层组件包括与所述旋转座可旋转连接的第二底板、设于所述第二底板上的第三滑轨、设于所述第二底板上的第一传动件以及与所述第一传动件传动连接的第一传动装置。
35.在一些实施例中,所述y移动层组件包括与所述第三滑轨连接的第三底板、设于所述第三底板上的第四滑轨,设于所述第三底板上的第二传动件以及与所述第二传动件传动连接的第二传动装置;
36.所述第三滑轨沿x轴方向设置,所述第四滑轨沿y轴方向设置。
37.实施本发明具有以下有益效果:该核电厂定位销水下收集机器人包括车体、与车体连接的升降机构、设于升降机构上端的旋转平台机构以及设于旋转平台机构上端的执行机构,该旋转平台机构用于带动执行机构进行x轴方向移动、y轴方向移动或者旋转运动,该执行机构包括与旋转平台机构连接的固定座、设于固定座上的顶升收集组件以及用于夹取定位销并将定位销投放至顶升收集组件的夹持组件。该核电厂定位销水下收集机器人可搭载夹持组件,能通过旋转平台机构以及升降机构调整夹持组件的位置,该夹持组件可在上部堆内构件燃料组件定位销更换过程中,将定位销上部残留部分从上部堆内构件取出并进
行收集,防止产生异物,操作过程中不需要工作人员进入水下,提高了作业效率,且可防止工作人员在检修的过程中受到辐射的影响。
附图说明
38.为了更清楚地说明本发明的技术方案,下面将结合附图及实施例对本发明作进一步说明,应当理解地,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可根据这些附图获得其他相关的附图。附图中:
39.图1是本发明一些实施例中的核电厂定位销水下收集机器人的立体结构示意图;
40.图2是本发明一些实施例中的核电厂定位销水下收集机器人的另一方向立体结构示意图;
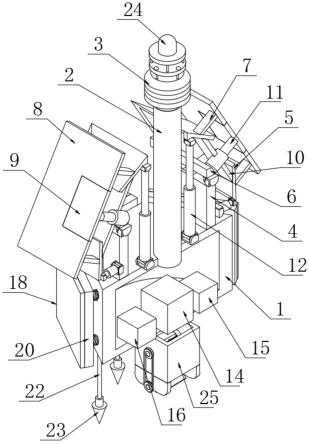
41.图3是本发明一些实施例中的执行机构的结构示意图;
42.图4是本发明一些实施例中的旋转平台机构的结构示意图。
具体实施方式
43.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。以下描述中,需要理解的是,“前”、“后”、“上”、“下”、“左”、“右”、“纵”、“横”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“头”、“尾”等指示的方位或位置关系为基于附图所示的方位或位置关系、以特定的方位构造和操作,仅是为了便于描述本技术方案,而不是指示所指的装置或元件必须具有特定的方位,因此不能理解为对本发明的限制。
44.还需要说明的是,除非另有明确的规定和限定,“安装”、“相连”、“连接”、“固定”、“设置”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。当一个元件被称为在另一元件“上”或“下”时,该元件能够“直接地”或“间接地”位于另一元件之上,或者也可能存在一个或更多个居间元件。术语“第一”、“第二”、“第三”等仅是为了便于描述本技术方案,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量,由此,限定有“第一”、“第二”、“第三”等的特征可以明示或者隐含地包括一个或者更多个该特征。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
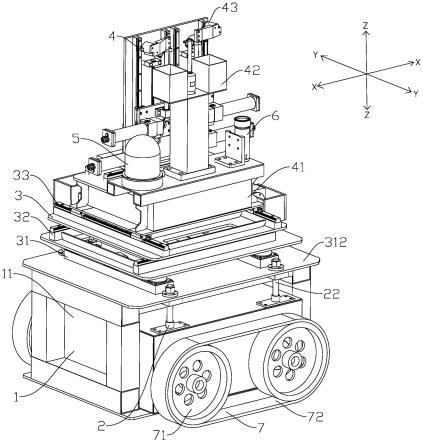
45.请参阅图1至图4,是本发明的一种核电厂定位销水下收集机器人,其包括车体1、与车体1连接的升降机构2、设于升降机构2上端的旋转平台机构3以及设于旋转平台机构3上端的执行机构4,该升降机构2用于带动旋转平台机构3以及执行机构4进行上下移动,旋转平台机构3用于带动所述执行机构4进行x轴方向移动、y轴方向移动或者旋转运动,该执行机构4包括与旋转平台机构3连接的固定座41、设于固定座41上的顶升收集组件42以及用于夹取定位销并将定位销投放至顶升收集组件42的夹持组件43,该核电厂定位销水下收集机器人还包括有行走机构7,在本实施例中,以该行走机构的图示行走方向为x轴方向,平面上与该x轴方向垂直设置的方向为y轴方向,以该核电厂定位销水下收集机器人的高度方向为z轴方向。
46.可以理解地,该核电厂定位销水下收集机器人可搭载夹持组件43,能通过旋转平
台机构3以及升降机构2调整夹持组件43的位置,该夹持组件43可在上部堆内构件燃料组件定位销更换过程中,将定位销上部残留部分从上部堆内构件取出并进行收集,防止产生异物,操作过程中不需要工作人员进入水下,提高了作业效率,且可防止工作人员在检修的过程中受到辐射的影响。
47.请参阅图2和图3,在一些实施例中,夹持组件43包括第一滑轨431、第一定位板432、第二滑轨433、第二定位板434、夹爪组件436,具体地,该第一定位板432可通过一对第一滑轨431与固定座41可移动连接,该第一定位板432上对称设置有两对第二滑轨433,该第二定位板434可通过一对第二滑轨433与第一定位板432可移动连接,该夹爪组件436设于第二定位板上用于夹取定位销,该第一滑轨431沿x轴方向设置,第二滑轨433沿z轴方向设置。
48.可以理解地,该固定座41大致呈矩形中空结构,其用于为第一滑轨431提供支撑定位的作用,该第一定位板432用于为该第二滑轨433提供支撑定位的作用,优选地,该第二滑轨433的数量为四条,其相互平行设置,其用于与该第二定位板434连接,该第二滑轨433为该第二定位板434提供导向作用,使得第二定位板434的移动更加顺滑,并可避免第二定位板434的晃动。在其他一些实施例中,该第二定位板434的数量可为n个,该第二滑轨433的数量也可为2n条,其中,n≥1,可根据实际工作状况或者所需夹持组件43工作的数量进行调整,这里不做具体限定,该第一滑轨431的数量也可根据实际情况进行调整。进一步地,该第一定位板432、第二定位板434均由驱动机构驱动移动,该驱动机构在一些实施例中可包括丝杆435和锥齿轮减速机437,能提高该夹持组件43的定位精度,该锥齿轮减速机437可通过锥齿轮与该丝杆435啮合连接。该驱动机构在其他一些实施例中可为气动装置、液压装置或者其他传动装置,这里不做具体限定。
49.进一步地,该夹爪组件436包括定位座4361、转动杆4362、过渡座4363、夹爪4364以及转杆驱动装置4365,该转动杆4362通过安装于定位座4361与第二定位板434连接,转动杆4362沿y轴方向设置,该夹爪4364通过过渡座4363与转动杆4362连接,该转杆驱动装置4365设于第二定位板434上通过锥齿轮与转动杆4362传动连接从而驱使夹爪4364旋转。
50.可以理解地,该转杆驱动装置4365可为锥齿轮减速电机,其用于驱动转动杆4362旋转,在其他一些实施例中,该转杆驱动装置4365也可为蜗轮蜗杆减速电机。其中,该转动杆4362与该锥齿轮抵接的一端设有与该锥齿轮形状匹配的啮合部,该啮合部使得该转杆驱动装置4365与该转动杆4362之间的传动更加精准稳定。该转杆驱动装置4365与该转动杆4362垂直设置可节省空间,提高了空间利用率,在其他一些实施例中,该转动杆4362可与该转杆驱动装置4365同轴设置。
51.其中,该定位座4361可为该转动杆4362提供导向作用,使其只能沿着z轴方向移动。进一步地,该过渡座4363用于连接该夹爪4364以及转动杆4362,该过渡座4363上设有用于供该夹爪4364安装定位的容置槽,该夹爪4364用于夹取顶出的残销管和螺母并将残销管和螺母投放到顶升收集组件42中,其可设于该容置槽中与该过渡座4363通过螺栓连接在一起,该夹爪4364可以是但不限于气动夹爪、液压夹爪、电动夹爪。
52.在一些实施例中,该顶升收集组件42包括驱动缸421、连接板422、顶杆423以及收集盒424,该驱动缸421设于固定座41的上端,该顶杆423与驱动缸421可移动连接,其沿y轴方向设置,收集盒424通过连接板422设于驱动缸421的上端面。可以理解地,该驱动缸421可为水压缸,其用于带动顶杆423上下运动,该顶杆423可用于将安装在上堆芯板处的定位销
顶出,该顶杆423向上的力最大可达到3吨。进一步地,该连接板422可为矩形板状结构,其与收集盒424可通过紧固件连接,该收集盒424用于存放经夹爪4364夹取后的残留定位销。在本实施例中,该收集盒424的数量为2个,其设于驱动缸421上端面的两侧,在其他一些实施例中,该收集盒424的数量可根据实际情况进行调整,这里不做具体限定。
53.优选地,该固定座41上还设有用于对整体环境进行观察的全景相机5以及用于对定位销进行定位的定位相机6,该全景相机5包括第一云台、与第一云台连接的第二云台以及设于第二云台上的相机本体,该第一云台用于带动相机本体进行360度旋转,该第二云台用于带动相机本体进行上仰和下俯。可以理解地,该全景相机5固定安装在该固定座41上,负责对整体环境进行观察,帮助操作者对机器人判定周围环境,该第一云台可使得相机本体在工作过程中根据实际需求进行转动,便于在最佳角度进行工作,使相机本体成像更加实时和全面,该第二云台可上仰和下俯的角度可达到120度,这样可以让操作者尽量观测到上方工具的状态和周围状态。在其他一些实施例中,该全景相机5的数量可为两个,两个该全景相机5可相对设置共同拍摄周围环境的状况,使得该全景相机5成像更加准确和全面。进一步地,该定位相机6可负责对上方定位销进行定位,其精度可以达到水下定位精度0.1mm,以确保夹爪4364在夹取定位销时的准确性和稳定性,大大提高了工作效率。
54.其中,该车体1为一体式密封箱体,其包括若干车板11,若干车板11通过焊接连接形成车体1,该车体1中设有控制组件,控制组件包括驱动电机、与驱动电机连接的减速机、控制元件以及用于获取核电厂定位销水下收集机器人工作状况的下位机。可以理解地,该减速器通过输出轴与行走机构7连接,该输出轴可通过动密封组件进行该输出轴径向密封,在该输出轴与车体1连接的位置设有密封圈以保证水无法进入车体1内部,车体1整体做防水处理。
55.进一步地,该控制元件可包括控制柜、电机电缆、电机驱动信号线以及电源。具体地,该核电厂定位销水下收集机器人在组装时,可先将驱动电机、减速机、控制元件以及下位机置于该车体1中,安装好之后锁紧上盖板,再通过连接构件将车体1与升降机构2连接。
56.在一些实施例中,该核电厂定位销水下收集机器人还包括行走机构7,行走机构7包括与减速机连接的行走轮71以及与行走轮71连接的履带72,该减速机通过穿设于车体1的输出轴与行走轮71连接,从而驱动行走轮71带动履带72移动。该行走机构7可以满足爬坡10度,最快行驶速度为0.5米/秒,其由驱动电机和减速机驱动,可以任意调整行走速度,可以原地旋转偏差量小于10%。该行走机构7的设置可使得该核电厂定位销水下收集机器人拥有较高的灵活性和机动性,增大了应用范围和场景,进一步提高了该核电厂定位销水下收集机器人的利用率。
57.在一些实施例中,该升降机构2包括设于车体1和旋转平台机构3之间的若干导柱22,若干导柱22外周套设有弹簧。优选地,该若干导柱22的数量可为4个,该导柱22与旋转平台机构3可通过紧固螺母以及法兰进行连接,该每个导柱22上均安装有弹簧,当升降机构2上方的力过大时,升降机构2下方的车体会被压到池底地面从而增加接触面积,减小对池底地面的压强。
58.请参阅图4,该旋转平台机构3包括旋转层组件31、设于旋转层组件31上的x移动层组件32以及设于x移动层组件32上的y移动层组件33,该旋转层组件31包括设于与若干导柱22连接的第一底板312,设于第一底板312上的旋转座以及设于第一底板312和x移动层组件
32之间的支撑座313。可以理解地,该旋转座的旋转角度为-45
°
至45
°
,该旋转座的精度可为0.05度。
59.其中,该x移动层组件32以及y移动层组件33可实现直线移动,可移动距离为正负75mm,其精度区间为0.02-0.06mm。该x移动层组件32包括与旋转座可旋转连接的第二底板321、设于第二底板321上的第三滑轨322、设于第二底板321上的第一传动件324以及与第一传动件324连接的第一传动装置325,该y移动层组件33包括与第三滑轨322连接的第三底板331、设于第三底板331上的第四滑轨332,设于第三底板331上的第二传动件334以及与第二传动件334传动连接的第二传动装置335。在本实施例中,该第三滑轨322、第四滑轨332的数量均为两个且其平行设置。在另外一些实施例中,该第三滑轨322、第四滑轨332的数量可根据实际情况进行调整,这里不做具体限定。
60.其中,该第三滑轨322与第四滑轨332垂直设置,该第一传动装置325与第一传动件324垂直设置,第二传动装置335与第二传动件334垂直设置,该第一传动装置325通过锥齿轮与第一传动件324连接从而带动第三底板331沿x轴方向移动,第二传动装置335通过锥齿轮与第二传动件334连接从而带动固定座41沿y轴方向移动。可以理解地,该旋转层组件31、x移动层组件32、y移动层组件33的运动均可通过滚珠丝杆和伺服电机来实现,保证了该核电厂定位销水下收集机器人工作时的精准性和稳定性。
61.特别地,该核电厂定位销水下收集机器人在上堆芯板下方行驶,定位销安装在上堆芯板的通孔里,定位销的头部在上堆芯板下表面处露出来,且该定位销的安装孔在堆芯板里为贯穿孔,该核电厂定位销水下收集机器人可通过顶杆432将定位销顶到上堆芯板上方,再由夹爪4364进行夹取。其中,该上堆芯板下表面与池底距离约1.7米,在定位销残管被顶杆423顶到堆芯板上方时,此时顶杆423不能收回,否则定位销会掉到上堆芯板上方形成新的定位销或者异物导致无法取出。最后通过两个夹爪4364升到上堆芯板上方通过迷你相机进行人工抓取。
62.可以理解地,该核电厂定位销水下收集机器人的工作步骤为:
63.1.在陆地上将供电电缆与车体连接,连接完成后通过起吊装置将核电厂定位销水下收集机器人吊放至水池中,操作人员通过控制系统操纵核电厂定位销水下收集机器人在水池中自由行走;
64.2.让定位相机6对上方定位销残管进行定位,通过旋转平台机构3将顶杆423轴心对准上方定位销残管中心,并且将顶杆432及上方的夹爪4364位置进行调整,使它们能升到上堆芯板上方;
65.3.控制驱动缸421开始作业,顶杆432向上运动,将定位销残管顶出上堆芯板,接下来,夹爪4364向上运动,升到上堆芯板上方,通过夹爪4364旁边的迷你相机进行人工抓取定位销残管。再原路返回,将取出的残销投入到收集盒424中,顶杆423收回,通过行走机构7带动核电厂定位销水下收集机器人行驶到下一位置,上述工作过程中可通过全景相机5实现对整个过程进行监测。
66.可以理解地,以上实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制;应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,可以对上述技术特点进行自由组合,还可以做出若干变形和改进,这些都属于本发明的保护范围;因此,凡跟本发明权利要求范围所做的
等同变换与修饰,均应属于本发明权利要求的涵盖范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。