1.本发明涉及电子电路技术与电气传动技术领域;具体是指一种新型高性能电子轴传动控制系统实现方法。
背景技术:
2.目前在电气传动技术领域,对于电子轴多轴联动系统的控制要求越来越高,不但要求高精度同步,还要求高实时性等。而现有的传统电机控制系统大多通过模拟量方式控制,还是存在灵活性不高、响应滞后、精确性不够以及零漂等问题。虽然有人提出了通过通信方式进行多轴联动控制系统设计的方案,不过大多是采用rs-485总线和can现场总线这两种。rs-485总线是国内在仪器仪表、自动控制领域运用最早、最广泛的串行总线;can现场总线是国际上应用最广泛、最热门的工业现场总线之一,所以这两者运用比较广,现有技术中多是以这两种总线然后结合plc编程来实现多轴联动控制。但在实际使用中,上述结构的控制系统,在使用于同步协调的高速网络技术和网络控制时,还是存在数据传输时延、数据包时序错乱、数据包丢失等问题。
3.针对这一问题,有人提出了将ethercat(英文全称为ethernet for control automation technology,是一种基于以太网的开发构架的实时工业现场总线通讯协议)技术引入多轴联动控制系统,并有进行相应的研究。本专利申请的发明人通过检索,查到有《微特电机》2013年第41卷第4期,发表的“基于ethercat的高性能伺服系统设计与实现”文章以及《科技导报》2012年第30期发表的“基于ethercat多轴伺服运动控制系统的同步性能研究”文章等相关的技术资料,但上述文章中只是做了一些学术上的研究,均没有涉及到新型高性能电子轴传动控制系统到底如何设计结构,具体的控制方法如何实现等问题。
4.综上所述,目前仍然缺少一种能够实现高精度同步,并能有效解决实现同步协调的高速网络技术和网络控制产生的数据传输时延、数据包时序错乱、数据包丢失等问题的高性能电子轴传动控制系统实现方法。
技术实现要素:
5.本发明要解决的技术问题是,提供一种能够实现高精度同步,并能有效解决实现同步协调的高速网络技术和网络控制产生的数据传输时延、数据包时序错乱、数据包丢失等问题的高性能电子轴传动控制系统实现方法。
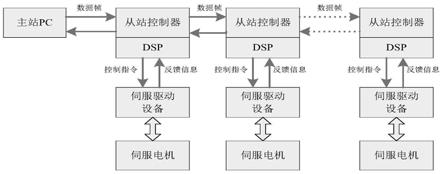
6.为解决上述技术问题,本发明提供的技术方案为:一种新型高性能电子轴传动控制系统实现方法,采用一主多从结构来实现多个电子轴之间的同步协调控制,以pc机为主站,基于从站接口的控制器和微处理器dsp芯片构建从站结构网络,所述的从站结构网络中具备dc分布时钟功能的各个从站在主站的直接控制下同步于一个参考时钟;每个从站连接有至少一套受控电子轴,各从站通过控制配套驱动设备来控制对应的电子轴;主站pc机通过基于以太网的开发构架的实时工业现场总线通讯协议网络周期性地发送控制指令给从站微处理器dsp从而控制电子轴驱动设备,受控设备的工作状态信息由对应检测机构送回
微处理器dsp,然后通过所述的总线通讯协议网络反馈给主站pc机,从而实现对受控设备的高精度同步协调控制。
7.作为优选,所述的总线通讯协议使用标准的ieee802.3以太网帧,所述的主站pc机上安装有标准的100base-tx以太网卡。
8.作为优选,所述的pc机主站内搭载的控制程序可根据所述的总线通讯协议需求进行自主编写,或者直接采用倍福公司的twincat软件控制程序。
9.作为优选,所述的基于以太网的开发构架的实时工业现场总线通讯协议网络中对应的硬件包括有从站控制器、从站微处理器和从站模块硬件接口模块;其中从站模块硬件接口模块包括有:物理层通信接口、数据链路层以及应用层控制电路。
10.作为进一步优选,所述的物理层通信接口采用支持mii接口和ebus接口两种类型的控制器芯片。
11.作为进一步优选,所述的数据链路层包括时钟源电路、eeprom和电源电路;其中时钟源电路使用25mhz时钟源;eeprom作为从站信息接口,用于存储从站控制器相关设备的配置信息;所述的电源电路配置有:3.3v的io信号电源、2.5v的逻辑内核电源以及锁相环电源。
12.作为进一步优选,由数据链路层完成数据的接收和发送以及错误的处理,同时通过微处理器dsp实现应用层协议,系统将需要处理的事件分为非周期性事件和周期性事件;从站非周期性事件主要有状态改变事件和邮箱通信事件,其数据的传输采用邮箱方式,只有当一方把要写入的数据写入到内存完成之后,另一方才能从该内存中读取数据;周期性事件在本设计中主要为控制程序和反馈数据,采用中断的方式处理;从站系统初始化完成之后,进入等待状态,当从站控制器到总线通信协议帧,便向微处理器dsp发出中断,dsp响应中断判断读取控制指令同时将反馈数据写入到从站控制器芯片中,至此dsp和从站控制器芯片完成一次数据交互;再由dsp将读取过来的控制指令进行解码,生成控制脉冲发送到驱动设备以驱动受控设备运转。
13.采用上述实现方法后,本发明具有如下有益效果:本发明中提出一种新型高性能电子轴传动控制系统实现方法,将ethercat技术引入到多轴控制运动控制系统中能够实现控制系统高精度同步功能,实现了高性能的电子轴传动,为实现控制系统的同步协调,研究控制系统同步协调控制策略,解决实现同步协调的高速网络技术和网络控制产生数据传输时延、数据包时序错乱、数据包丢失等问题的研究提出了解决的方法,为提高性能的控制算法提供了条件,为其在控制传动领域中发挥技术优势提供了良好的应用价值。
14.综上所述,本发明提供了一种能够实现高精度同步,并能有效解决实现同步协调的高速网络技术和网络控制产生的数据传输时延、数据包时序错乱、数据包丢失等问题的高性能电子轴传动控制系统实现方法。
附图说明
15.图1是ethercat帧结构示意图。
16.图2是本发明新型高性能电子轴传动控制系统的系统框图。
17.图3是本发明新型高性能电子轴传动控制系统中多轴运动控制系统从站工作原理图。
18.图4是本发明新型高性能电子轴传动控制系统中从站硬件接口电路设计图。
19.图5是本发明新型高性能电子轴传动控制系统中非周期性数据传输流程图。
20.图6是本发明新型高性能电子轴传动控制系统中周期性数据传输流程图。
具体实施方式
21.下面结合附图对本发明做进一步的详细说明。
22.一种新型高性能电子轴传动控制系统实现方法,采用一主多从结构来实现多个电子轴之间的同步协调控制,以pc机为主站,基于从站接口的控制器和微处理器dsp芯片构建从站结构网络,所述的从站结构网络中具备dc分布时钟功能的各个从站在主站的直接控制下同步于一个参考时钟;每个从站连接有至少一套受控电子轴,各从站通过控制配套驱动设备来控制对应的电子轴;主站pc机通过基于以太网的开发构架的实时工业现场总线通讯协议网络周期性地发送控制指令给从站微处理器dsp从而控制电子轴驱动设备,受控设备的工作状态信息由对应检测机构送回微处理器dsp,然后通过所述的总线通讯协议网络反馈给主站pc机,从而实现对受控设备的高精度同步协调控制。
23.作为优选,所述的总线通讯协议使用标准的ieee802.3以太网帧,所述的主站pc机上安装有标准的100base-tx以太网卡。
24.作为优选,所述的pc机主站内搭载的控制程序可根据所述的总线通讯协议需求进行自主编写,或者直接采用倍福公司的twincat软件控制程序。
25.作为优选,所述的基于以太网的开发构架的实时工业现场总线通讯协议网络中对应的硬件包括有从站控制器、从站微处理器和从站模块硬件接口模块;其中从站模块硬件接口模块包括有:物理层通信接口、数据链路层以及应用层控制电路。
26.作为进一步优选,所述的物理层通信接口采用支持mii接口和ebus接口两种类型的控制器芯片。
27.作为进一步优选,所述的数据链路层包括时钟源电路、eeprom和电源电路;其中时钟源电路使用25mhz时钟源;eeprom作为从站信息接口,用于存储从站控制器相关设备的配置信息;所述的电源电路配置有:3.3v的io信号电源、2.5v的逻辑内核电源以及锁相环电源。
28.作为进一步优选,由数据链路层完成数据的接收和发送以及错误的处理,同时通过微处理器dsp实现应用层协议,系统将需要处理的事件分为非周期性事件和周期性事件;从站非周期性事件主要有状态改变事件和邮箱通信事件,其数据的传输采用邮箱方式,只有当一方把要写入的数据写入到内存完成之后,另一方才能从该内存中读取数据;周期性事件在本设计中主要为控制程序和反馈数据,采用中断的方式处理;从站系统初始化完成之后,进入等待状态,当从站控制器到总线通信协议帧,便向微处理器dsp发出中断,dsp响应中断判断读取控制指令同时将反馈数据写入到从站控制器芯片中,至此dsp和从站控制器芯片完成一次数据交互;再由dsp将读取过来的控制指令进行解码,生成控制脉冲发送到驱动设备以驱动受控设备运转。
29.进一步结合附图1到附图6,所述的一种新型高性能电子轴传动控制系统实现方法在实施时具体包括以下内容。
30.(1)硬件设计:结合附图3,本专利方案中ethercat网络通信最关键的两个硬件是
从站控制器和从站微处理器。从站控制器优选采用倍福公司的et1100芯片,而从站微处理器dsp则优选采用ti公司179引脚的tms320f2812芯片。从站模块硬件接口设计分为三个部分:物理层通信接口、数据链路层以及应用层控制电路。
31.系统物理层硬件优选采用倍福公司开发的et1100控制器芯片,该芯片提供4个物理层接口,支持mii接口和ebus接口两种类型。ebus接口方式结构简单,成本较低。mii接口可以通过工业以太网网线与pc机相连,最远有效传输100米,容错能力好,可应用于高速数据传输以及较远的场合。
32.设计优选采用mii接口方式,并且由于网络系统为典型的线性结构,所以只要将接口数目设定为2(最后从站的端口1将自动关闭),打开的两个接口分别为端口0和端口1,p_mode[0:1]设置为00,p_conf[3:0]设置为1100。rj45连接器是ethercat的通信端口;网络变压器实现信号的隔离,提高通信的可靠度;phy元件作为物理层控制器,实现数据的编、译码和收发功能等功能。
[0033]
数据链路层主要包括时钟源电路、eeprom和电源电路。具体设计时,物理层接口phy芯片和et1100共同使用25mhz时钟源。从站控制器(esc)使用eeprom存储相关设备的配置信息,称之为从站信息接口esi(ethercat slave information),eepeom的容量大小为1kbit~4mbit[10]。系统在复位状态下由主站控制eeprom的操作,之后可以移交给pdi控制。而电源电路需要配置的有:3.3v的io信号电源vcc_io、2.5v的逻辑内核电源vcc_core以及锁相环电源vcc_pll。
[0034]
从站控制器(esc)的应用数据接口称为过程数据接口(process data interface),简称pdi接口。分为两种接口方式:直接io信号接口和dpram数据接口,后者又可以支持并行和串行两种方式。对于需要高精确同步性能这样的多轴控制运动系统来说,首要考虑的是它的响应能力以及数据处理容量,包括控制环和上层协议堆栈。设计微处理器优选采用ti公司的tms320f2812dsp芯片,该芯片为性能强大的32为处理器,所以pdi接口优选采用同步微处理器接口,该接口方式需要用到复用的数据和地址总线,其优势在于数据处理性能强,响应时间短。如附图4为ethercat从站硬件接口电路设计图。
[0035]
(2)软件设计
[0036]
ethercat从站模块软件设计由从站信息配置和从站模块驱动程序两个部分组成,其功能是要完成从站设备的初始化以及进行主从站的数据交互任务。
[0037]
主站使用twincat软件下载从站描述信息到eeprom中,这些信息包括设备类型、网络结构、从站地址配置、过程数据大小、eeprom配置等,以xml格式的形式存储,其中eeprom主要配置如下:
[0038]
《eeprom》
[0039]
《bytesize》128《/bytesize》
[0040]
《configdata》0a0607250a00000003《/configdata》
[0041]
《/eeprom》
[0042]
0a表示pdi选择微处理器方式;04表示使能dc时钟sync输出单元;07表示sync输出;25表示ta、irq、bhe、ts引脚低电平有效以及微处理器方式优选采用的字节选择形式;0a设置sync信号脉冲长度,每个信号单元为10ns,所以0a则表示sync的脉冲长度为10*10=100ns;00000003表示从站数为3。
[0043]
数据链路层完成数据的接收和发送以及错误的处理,又通过微处理器dsp实现应用层协议,分为非周期性事件和周期性事件。从站非周期性事件主要有状态改变事件和邮箱通信事件,其数据的传输优选采用邮箱方式,只有当一方把要写入的数据写入到内存完成之后,另一方才能从该内存中读取数据。周期性数据在本设计中主要为控制程序和反馈数据,可以优选采用中断的方式处理。从站系统初始化完成之后,进入等待状态,当et1100芯片检测到ethercat帧,便向dsp发出中断,dsp响应中断判断读取控制指令同时将反馈数据写入到et1100,这样dsp和et1100完成一次数据交互。dsp将读取过来的控制指令进行解码,生成控制脉冲发送到控制驱动控制器,驱动电机运转。其中图5和图6分别表示非周期数据传输和周期数据传输流程图,具体实施时,不同类型的数据可对照流程图进行设计传输方案。
[0044]
其中ethercat(ethernet for control automation technology)是一种基于以太网的开发构架的实时工业现场总线通讯协议。ethercat采用的是主从式结构的实时工业以太网技术,该技术没有重新定义新的以太网帧结构,而是在标准以太网帧结构中使用了一个特殊的标准类型0x88a4,采用这种方式可以使控制数据直接写入以太网帧内,并且可以与遵循其它协议的以太网帧在同一网络中并行。ethercat每个从站节点中的从站控制芯片在数据帧转发到下一个从站的同时读取该从站的数据,所以数据传输的实时性能很高。如附图1所示一个ethercat数据帧由ethercat数据帧头和若干个ethercat子报文组成,每个子报文对应独立的设备或从站存储区域。数字信号处理对应英文为digital signal processing,简称dsp;eeprom对应英文为electrically erasable programmable read only memory,是指带电可擦可编程只读存储器。
[0045]
以上对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的实现方法并不局限于此,如可以选用其它实时工业以太网技术实现网络拓扑结构进行替换,通讯协议方面,也可以选择其它开放式的以太网协议。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。