一种基于混合现实的ct图像识别辅助系统
技术领域
1.本发明涉及图像识别技术领域,具体为一种基于混合现实的ct图像识别辅助系统。
背景技术:
2.医学混合现实是mr在医学领域的拓展和延伸,其应用首先依赖于医学三维模型的建立,医学模型的原始数据多来自ct和核磁共振的dicom格式数据,依据原始数据通过三维可视化精准渲染技术构建三维模型。
3.目前混合现实设备可以立体、直观、逼真地看到身体器官的位置、形态、结构和病变状况;医生能够更直观、高效地解释病情,有效弥补医患双方专业知识的鸿沟,使医患沟通更简单、准确和顺畅,但是混合现实在识别ct图像时,无法对识别ct图像的数据和进程进行检测,从而无法确定ct图像识别数据的准确度,为此,提供了一种基于混合现实的ct图像识别辅助系统,通过ct图像与拼装的图像上的轮廓的对比,从而可以快速的辨别体素扫描模块扫描的ct图像的形状。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种基于混合现实的ct图像识别辅助系统,解决了无法确定ct图像识别数据的准确度的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种基于混合现实的ct图像识别辅助系统,包括图像扫描模块,所述图像扫描模块的输出端与ct影像识别单元的输入端连接,所述图像扫描模块分别与光照辅助单元、参数提取单元和结构分辨单元实现双向连接,所述光照辅助单元、参数提取单元和结构分辨单元的输出端均与ct影像识别单元的输入端连接。
8.本发明进一步设置为:所述光照辅助单元包括图像照射模块、光色接收模块、光色对比模块、区域划分模块、图像整合模块和区域对比模块,所述图像照射模块的输出端与光色接收模块的输入端连接,所述光色接收模块的输出端与光色对比模块的输入端连接,所述光色对比模块的输出端与区域划分模块的输入端连接,所述区域划分模块的输出端与图像整合模块的输入端连接,所述图像整合模块的输出端与区域对比模块的输入端连接;
9.所述图像照射模块通过灯光对ct图像进行照射;
10.所述光色接收模块对图像照射模块照射的光进行阻挡接收;
11.所述区域划分模块将光色接收模块接收的光色划分形成与ct图像一样的轮廓;
12.所述图像整合模块将区域划分模块划分的轮廓拼装成与ct图像大小的图像;
13.所述区域对比模块将图像整合模块拼装的图像与体素扫描模块扫描的ct图像进行对比。
14.通过采用上述技术方案,让ct图像与拼装的图像上的轮廓的对比,从而可以快速的辨别体素扫描模块扫描的ct图像的形状。
15.所述ct影像识别单元包括体素扫描模块、矩阵扫描模块和密度分辨率模块;
16.所述体素扫描模块扫描ct图像并将ct图像按一定宽度和长度分成若干个小立方体;
17.所述矩阵扫描模块将体素扫描模块后的若干个小立方体以横行、纵行的数字矩阵,给若干个小立方体标记坐标;
18.所述密度分辨率模块分辨体素扫描模块扫描ct图像中两个组织之间最小密度的差异。
19.本发明进一步设置为:所述参数提取单元包括坐标建立模块、数据排比模块和坐标对比模块,所述坐标建立模块的输出端与数据排比模块的输入端连接,所述数据排比模块的输出端与坐标对比模块的输入端连接;
20.所述坐标建立模块在ct图像上建立与矩阵扫描模块相同的平面坐标系;
21.所述数据排比模块从ct图像的数据坐标中随机抽取五组坐标;
22.所述坐标对比模块将ct图像上随机抽取的五组坐标与矩阵扫描模块上的数据坐标进行对比。
23.通过采用上述技术方案,让五组坐标与矩阵扫描模块上的数据坐标进行对比,从而可以快速的辨别矩阵扫描模块扫描的ct图像的准确性
24.所述图像扫描模块的输出端分别与图像照射模块和坐标建立模块的输入端连接。
25.所述区域对比模块与坐标对比模块的输出端均与ct影像识别单元的输入端连接。
26.本发明进一步设置为:所述结构分辨单元包括结构提取模块、差异提取模块和分辨对比模块,所述结构提取模块的输出端与差异提取模块的输入端连接,所述差异提取模块的输出端与分辨对比模块的输入端连接;
27.所述结构提取模块提取ct图像上相邻两种不同结构的密度数据;
28.所述差异提取模块计算相邻两种不同结构密度分辨率的差异;
29.所述分辨对比模块将相邻两种不同结构密度差异的数值与密度分辨率模块扫描ct图像中两个组织之间最小密度差异的数值进行对比。
30.所述分辨对比模块的输出端与密度分辨率模块的输入端连接。
31.所述图像扫描模块的输出端分别与结构提取模块的输入端连接。
32.通过采用上述技术方案,让两个组织之间密度差异的数值,从而可以快速的辨别ct图像上组织结构的位置。
33.(三)有益效果
34.本发明提供了一种基于混合现实的ct图像识别辅助系统。具备以下有益效果:
35.(1)该基于混合现实的ct图像识别辅助系统,通过图像照射模块通过灯光对ct图像进行照射,同时光色接收模块对图像照射模块照射的光进行阻挡接收,区域划分模块将光色接收模块接收的光色划分形成与ct图像一样的轮廓,并将划分的区域传入图像整合模块中,图像整合模块将划分的轮廓拼装成与ct图像大小的图像,区域对比模块将拼装的图像与体素扫描模块扫描的ct图像进行对比,这样可以通过ct图像与拼装的图像上的轮廓的对比,从而可以快速的辨别体素扫描模块扫描的ct图像的形状。
36.(2)该基于混合现实的ct图像识别辅助系统,通过坐标建立模块在ct图像上建立与矩阵扫描模块相同的平面坐标系,当坐标建立模块建立完整的坐标系后,数据排比模块从ct图像的数据坐标中随机抽取五组坐标,坐标对比模块将ct图像的数据坐标中随机抽取的五组坐标与矩阵扫描模块上的数据坐标进行对比,这样可以通过五组坐标与矩阵扫描模块上的数据坐标进行对比,从而可以快速的辨别矩阵扫描模块扫描的ct图像的准确性。
37.(3)该基于混合现实的ct图像识别辅助系统,通过结构提取模块提取ct图像上相邻两种不同结构的密度数据,并将不同结构的密度数据传入差异提取模块,差异提取模块计算出相邻两种不同结构密度分辨率的差异,分辨对比模块将相邻两种不同结构密度差异的数值与密度分辨率模块扫描ct图像中两个组织之间最小密度差异的数值进行对比,这样可以通过两个组织之间密度差异的数值,从而可以快速的辨别ct图像上组织结构的位置。
附图说明
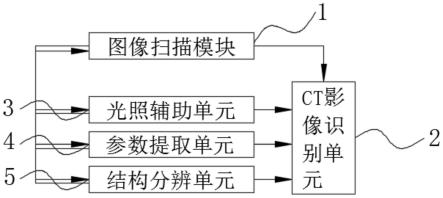
38.图1为本发明的系统原理框图;
39.图2为本发明ct影像识别单元的系统原理框图;
40.图3为本发明光照辅助单元的系统原理框图;
41.图4为本发明参数提取单元的系统原理框图;
42.图5为本发明结构分辨单元的系统原理框图。
43.图中,1、图像扫描模块;2、ct影像识别单元;3、光照辅助单元;4、参数提取单元;5、结构分辨单元;6、图像照射模块;7、光色接收模块;8、光色对比模块;9、区域划分模块;10、图像整合模块;11、区域对比模块;12、体素扫描模块;13、矩阵扫描模块;14、密度分辨率模块;15、坐标建立模块;16、数据排比模块;17、坐标对比模块;18、结构提取模块;19、差异提取模块;20、分辨对比模块。
具体实施方式
44.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
45.请参阅图1-5,本发明实施例提供一种技术方案:一种基于混合现实的ct图像识别辅助系统,包括图像扫描模块1,图像扫描模块1的输出端与ct影像识别单元2的输入端连接,图像扫描模块1分别与光照辅助单元3、参数提取单元4和结构分辨单元5实现双向连接,光照辅助单元3、参数提取单元4和结构分辨单元5的输出端均与ct影像识别单元2的输入端连接。
46.作为优选方案,如图3,光照辅助单元3包括图像照射模块6、光色接收模块7、光色对比模块8、区域划分模块9、图像整合模块10和区域对比模块11,图像照射模块6的输出端与光色接收模块7的输入端连接,光色接收模块7的输出端与光色对比模块8的输入端连接,光色对比模块8的输出端与区域划分模块9的输入端连接,区域划分模块9的输出端与图像整合模块10的输入端连接,图像整合模块10的输出端与区域对比模块11的输入端连接。
47.进一步的,图像照射模块6通过灯光对ct图像进行照射。
48.进一步的,光色接收模块7对图像照射模块6照射的光进行阻挡接收。
49.进一步的,区域划分模块9将光色接收模块7接收的光色划分形成与ct图像一样的轮廓。
50.进一步的,图像整合模块10将区域划分模块9划分的轮廓拼装成与ct图像大小的图像。
51.进一步的,区域对比模块11将图像整合模块10拼装的图像与体素扫描模块12扫描的ct图像进行对比。
52.进一步的,区域划分模块9将光色接收模块7接收的光色划分形成与ct图像一样的轮廓,并将划分的区域传入图像整合模块10中,图像整合模块10将划分的轮廓拼装成与ct图像大小的图像,区域对比模块11将拼装的图像与体素扫描模块12扫描的ct图像进行对比,这样可以通过ct图像与拼装的图像上的轮廓的对比,从而可以快速的辨别体素扫描模块12扫描的ct图像的形状。
53.作为优选方案,如图2,ct影像识别单元2包括体素扫描模块12、矩阵扫描模块13和密度分辨率模块14。
54.进一步的,体素扫描模块12扫描ct图像并将ct图像按一定宽度和长度分成若干个小立方体。
55.进一步的,矩阵扫描模块13将体素扫描模块12后的若干个小立方体以横行、纵行的数字矩阵,给若干个小立方体标记坐标。
56.进一步的,密度分辨率模块14分辨体素扫描模块12扫描ct图像中两个组织之间最小密度的差异。
57.作为优选方案,如图4,参数提取单元4包括坐标建立模块15、数据排比模块16和坐标对比模块17,坐标建立模块15的输出端与数据排比模块16的输入端连接,数据排比模块16的输出端与坐标对比模块17的输入端连接;
58.进一步的,坐标建立模块15在ct图像上建立与矩阵扫描模块13相同的平面坐标系;
59.进一步的,数据排比模块16从ct图像的数据坐标中随机抽取五组坐标。
60.进一步的,坐标对比模块17将ct图像的数据坐标中随机抽取的五组坐标与矩阵扫描模块13上的数据坐标进行对比,这样可以通过五组坐标与矩阵扫描模块13上的数据坐标进行对比,从而可以快速的辨别矩阵扫描模块13扫描的ct图像的准确性。
61.进一步的,图像扫描模块1的输出端分别与图像照射模块6和坐标建立模块15的输入端连接。
62.进一步的,区域对比模块11与坐标对比模块17的输出端均与ct影像识别单元2的输入端连接。
63.作为优选方案,如图5,结构分辨单元5包括结构提取模块18、差异提取模块19和分辨对比模块20,结构提取模块18的输出端与差异提取模块19的输入端连接,差异提取模块19的输出端与分辨对比模块20的输入端连接。
64.进一步的,结构提取模块18提取ct图像上相邻两种不同结构的密度数据。
65.差异提取模块19计算相邻两种不同结构密度分辨率的差异。
66.进一步的,分辨对比模块20将相邻两种不同结构密度差异的数值与密度分辨率模
块14扫描ct图像中两个组织之间最小密度差异的数值进行对比,这样可以通过两个组织之间密度差异的数值,从而可以快速的辨别ct图像上组织结构的位置。
67.进一步的,分辨对比模块20的输出端与密度分辨率模块14的输入端连接。
68.进一步的,图像扫描模块1的输出端分别与结构提取模块18的输入端连接。
69.工作时,首先图像扫描模块1将ct图像识别信息传入ct影像识别单元2中,ct影像识别单元2让素扫描模块、矩阵扫描模块13和密度分辨率模块14分别对ct图像进行扫描,体素扫描模块12扫描ct图像并将ct图像按一定宽度和长度分成若干个小立方体,矩阵扫描模块13将体素扫描模块12后的若干个小立方体以横行、纵行的数字矩阵,给若干个小立方体标记坐标,密度分辨率模块14分辨体素扫描模块12扫描ct图像中两个组织之间最小密度的差异,同时图像扫描模块1再将ct图像识别信息传入光照辅助单元3、参数提取单元4和结构分辨单元5的内部;
70.当光照辅助单元3接收到信息后,图像照射模块6通过灯光对ct图像进行照射,同时光色接收模块7对图像照射模块6照射的光进行阻挡接收,区域划分模块9将光色接收模块7接收的光色划分形成与ct图像一样的轮廓,并将划分的区域传入图像整合模块10中,图像整合模块10将划分的轮廓拼装成与ct图像大小的图像,区域对比模块11将拼装的图像与体素扫描模块12扫描的ct图像进行对比,当ct图像与拼装的图像上的轮廓不一样时,区域对比模块11将结果信息传入图像扫描模块1中,让图像扫描模块1重新发送ct图像识别信息;
71.当参数提取单元4接收到信息后,坐标建立模块15在ct图像上建立与矩阵扫描模块13相同的平面坐标系,当坐标建立模块15建立完整的坐标系后,数据排比模块16从ct图像的数据坐标中随机抽取五组坐标,坐标对比模块17将ct图像的数据坐标中随机抽取的五组坐标与矩阵扫描模块13上的数据坐标进行对比,当随机抽取的五组坐标与矩阵扫描模块13上的数据坐标位置比对时,坐标对比模块17将结果信息传入图像扫描模块1中,让图像扫描模块1重新发送ct图像识别信息;
72.当结构分辨单元5接收到信息后,结构提取模块18提取ct图像上相邻两种不同结构的密度数据,并将不同结构的密度数据传入差异提取模块19,差异提取模块19计算出相邻两种不同结构密度分辨率的差异,分辨对比模块20将相邻两种不同结构密度差异的数值与密度分辨率模块14扫描ct图像中两个组织之间最小密度差异的数值进行对比,当密度差异的数值不一致时,分辨对比模块20将结果信息传入图像扫描模块1中,让图像扫描模块1重新发送ct图像识别信息。
73.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。