1.本发明涉及遥感目标提取技术领域,具体是一种基于扩展道路形状指数的高分辨率影像道路提取方法。
背景技术:
2.道路网络是交通基础设施的重要组成部分,同时也是地理国情的重要基础数据。完整、及时、准确的道路网络,在人们的日常出行、电子商务的物流配送和国家发展战略规划上都具有广泛的社会需求,同时也在社会经济活动中发挥着重要的作用,随着互联网时代的全面到来,以及移动互联网和人工智能技术的飞速发展,信息化和智能化是城市未来的发展方向。以智慧城市为例,它是以计算机技术、多媒体技术、大规模存储技术以及物联网技术为基础,以宽带网络为纽带,运用遥感、全球定位系统、地理信息系统、遥测、仿真
‑
虚拟等技术,对城市进行多分辨率、多尺度、多时空和多种类的三维描述。数字城市基础设施是智慧城市建设的基础,而作为其重要组成部分,高精度三维道路网络的构建越来越重要,由于航空和航天遥感技术的快速发展,遥感技术逐渐成为当今社会信息化高速发展的重要工具。遥感技术能够快速、准确地获取大量地面观测数据,而相较于中低分辨率卫星影像,高分辨率遥感影像,具有更加海量和丰富的地表信息,为地理信息系统(geographic information system,gis)数据的动态更新、gis的发展和应用提供了更加有利的条件,对于地图更新、影像匹配、变化检测等也具有重要意义。因此,从高分影像中提取道路成为当前的研究热点。
3.目前,测绘数据生产部门主要使用人工目视解译的方法从遥感影像以及航空影像中提取道路。人工目视解译的方法相对容易操作,且提取精度较高,其原因在于人类具备大量的道路先验信息,包括道路形状特征、拓扑特征及与其他地物的对比度等;同时,人工目视判读对图像噪声不敏感,可以很好地克服建筑物、阴影、道路两旁的植被等容易对道路提取产生影响的不利因素。因此,在人力及时间资源充裕的情况下,利用人工目视解译的方法提取道路是可行的;但对于大面积区域及在紧急情况下要求快速提取道路网时,人工提取的速度远未达到要求。此时就需要借助计算机,实现对道路网的自动或半自动提取,以减轻内业工作量,提高工作效率。但在实际应用中,由于道路的复杂性,比如图像噪声、道路材料的不同(水泥、柏油)、建筑物、植被及阴影的影响,现有道路提取算法尚未完全解决道路提取问题。因此,从遥感影像中提取道路仍然是遥感领域的一项研究难点,亟需进一步研究。
技术实现要素:
4.本发明的目的在于提供一种基于扩展道路形状指数的高分辨率影像道路提取方法,旨在解决现有技术中针对传统道路提取方法的道路特征使用尺度单一,解决了传统面向对象的道路提取方法中,道路的空间形状特征描述不准确的问题。
5.为实现上述目的,本发明采用如下技术方案:一种基于扩展道路形状指数的高分辨率影像道路提取方法,包括以下模块;预处理模块:以逐个图斑的方式提取高分辨率遥感
影像的光谱特征和空间自相关特征,使用超像素分割方法提取图像图斑,计算每个图斑光谱特征和空间自相关特征;扩展道路形状指数提取模块:提取图像图斑后,每个图斑都通过迭代程序进行扫描和处理,通过区域扩展算法获得每个图斑的扩展区域,计算扩展道路区域的空间形状特征,包括基于骨架的对象线性指数和平均道路宽度特征;道路提取模块:基于多尺度协同表示方法对道路概率进行估计,最后使用图割法进行道路分割得到道路面提取结果。
6.本发明的进一步的技术方案为,在所述预处理模块中,超像素分割方法包括以下步骤:初始化种子点:按照设定的超像素个数,在图像内均匀的分配种子点;在种子点的n*n邻域内重新选择种子点,计算该邻域内所有像素点的梯度值,将种子点移到该邻域内梯度最小的地方,其中n=3;在每个种子点周围的邻域内为每个像素点分配类标签;距离度量:包括颜色距离和空间距离,对于每个搜索到的像素点,分别计算其与该种子点的距离;迭代优化:上述步骤不断迭代直到误差收敛,其中迭代次数为10;增强连通性:新建一张标记表,表内元素均为
‑
1,按照z型走向将不连续的超像素、尺寸过小超像素重新分配给邻近的超像素,遍历过的超像素分配给相应的标签,直到所有超像素遍历完毕。
7.本发明的进一步的技术方案为,所述扩展道路形状指数提取模块包括以分割图斑为中心进行区域扩展和基于扩展区域的空间特征提取两部分。
8.本发明的进一步的技术方案为,所述以分割图斑为中心进行区域扩展包括以下步骤:引入地理学第一定律用于提取图像空间特征,并用莫兰指数来表示空间相关性;基于光谱特征、空间特征、纹理特征的超像素形状特征,根据高分辨率遥感图像中道路的空间延伸特性和利用slic超像素分割方法分割出的图斑的均匀规律特征;图斑区域扩展算法步骤:输入一个分割的影像图斑oc,输出or:包围or的一组图斑集。
9.本发明的进一步的技术方案为,所述图斑区域扩展算法具体包括以下步骤:初始化步骤:将oc添加到or中;将拓扑中与接触的图斑收集在容器ocon中,其中ocon=o1,o2,o3,
……
ot;基于图斑oc的光谱均值构建特征向量vc,并用同样的方法计算ocon中的每个的特征向量vk,其中1≤k≤t,比较vc和vk之间的光谱距离,并从ocon中选择距离最近的邻接图斑os;将os和oc对比,如果os和oc满足约束规则r1、r2和r3,则os被接受为与oc属于相同目标源的图斑;将os添加到or中,同时os替换oc进行下一步的扩展探索;从步骤1到步骤5是迭代过程,当不满足三个约束规则中的任何一个时,迭代扩展终止并返回or。
10.本发明的进一步的技术方案为,所述基于扩展区域的空间特征提取为:当围绕中心图斑的扩展迭代终止时,输出一组均匀且空间连续的区域or,使用基于骨架的对象线性指数和平均道路宽度用于描述图斑组成的区域or的空间特征。
11.本发明的进一步的技术方案为,所述道路提取模块过程如下:基于多尺度协同表示和图割算法的道路提取,选用基于多尺度协同表示方法,使用训练样本的线性组合来表示一个测试样本,得到每个物体在一定尺度上的道路概率,同一物体中的所有像素都被赋予一个与该物体相同的似然值,将三个不同尺度的所有道路概率图融合为一个整体,最后得到每个像素的道路可能性;给定图像i,构造无向图,通过多尺度协同表示方法获得了道路概率图,以此分割图像。
12.本发明的有益效果是:
13.针对传统道路提取方法的道路特征使用尺度单一的问题,考虑到道路在高分辨率
遥感影像中所具有的多尺度性和空间结构各异性,将道路的空间特征提取扩展到多尺度上,并通过构建具有扩展性的道路形状指数,解决传统面向对象的道路提取方法中,道路的空间形状特征描述不准确的问题。
附图说明
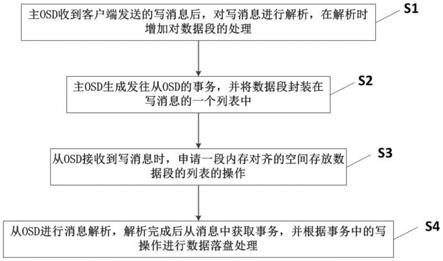
14.图1是本发明中基于扩展道路形状指数的道路提取流程图。
具体实施方式
15.下面结合附图对本发明的具体实施方式作进一步的说明。
16.如图1所示,一种基于扩展道路形状指数的高分辨率影像道路提取方法,包括以下模块;预处理模块:以逐个图斑的方式提取高分辨率遥感影像的光谱特征和空间自相关特征,使用超像素分割方法提取图像图斑,计算每个图斑光谱特征和空间自相关特征;扩展道路形状指数提取模块:提取图像图斑后,每个图斑都通过迭代程序进行扫描和处理,通过区域扩展算法获得每个图斑的扩展区域,计算扩展道路区域的空间形状特征,包括基于骨架的对象线性指数和平均道路宽度特征;道路提取模块:基于多尺度协同表示方法对道路概率进行估计,最后使用图割法进行道路分割得到道路面提取结果,需要说明的是:可以使用基于simple linear iterative clustering算法的超像素分割方法提取图像图斑,slic超像素分割方法是一种面向对象的分割方法,与单个像素相比,图斑具有更多的可用特征,例如形状、大小和纹理,并且能平滑很多“椒盐”噪声。
17.在本具体实施例中,针对传统道路提取方法的道路特征使用尺度单一的问题,考虑到道路在高分辨率遥感影像中所具有的的多尺度性和空间结构各异性,将道路的空间特征提取扩展到多尺度上,并通过构建具有扩展性的道路形状指数,解决传统面向对象的道路提取方法中,道路的空间形状特征描述不准确的问题。
18.本发明的另一具体实施例中,在所述预处理模块中,超像素分割方法包括以下步骤:初始化种子点即聚类中心:按照设定的超像素个数,在图像内均匀的分配种子点;在种子点的n*n邻域内重新选择种子点,计算该邻域内所有像素点的梯度值,将种子点移到该邻域内梯度最小的地方,其中n=3;这样做的目的是为了避免种子点落在梯度较大的轮廓边界上,以免影响后续聚类效果,在每个种子点周围的邻域内为每个像素点分配类标签,即属于哪个聚类中心;与标准的k
‑
means在整张图中搜索不同,slic的搜索范围限制为2s*2s,可以加速算法收敛,距离度量:包括颜色距离和空间距离,对于每个搜索到的像素点,分别计算其与该种子点的距离;迭代优化:上述步骤不断迭代直到误差收敛,可以理解为每个像素点聚类中心不再发生变化为止,实验发现10次迭代对绝大部分图片都可以得到较理想效果,所以一般迭代次数取10,但不限于是10次,也可以为8次、9次、11次、12次等;增强连通性:新建一张标记表,表内元素均为
‑
1,按照z型走向即从左到右,从上到下顺序,将不连续的超像素、尺寸过小超像素重新分配给邻近的超像素,遍历过的超像素分配给相应的标签,直到所有超像素遍历完毕,
19.具体的,所述扩展道路形状指数提取模块包括以分割图斑为中心进行区域扩展和基于扩展区域的空间特征提取两部分。
20.具体的,所述以分割图斑为中心进行区域扩展包括以下步骤:引入地理学第一定
律用于提取图像空间特征,并用莫兰指数来表示空间相关性;基于光谱特征、空间特征、纹理特征的超像素形状特征,根据高分辨率遥感图像中道路的空间延伸特性和利用slic超像素分割方法分割出的图斑的均匀规律特征;图斑区域扩展算法步骤:输入一个分割的影像图斑oc,输出or:包围or的一组图斑集。
21.具体的,所述图斑区域扩展算法具体包括以下步骤:初始化步骤:将oc添加到or中;将拓扑中与接触的图斑收集在容器ocon中,其中ocon=o1,o2,o3,
……
ot;
22.基于图斑oc的光谱均值构建特征向量vc,并用同样的方法计算ocon中的每个的特征向量vk,其中1≤k≤t,比较vc和vk之间的光谱距离,并从ocon中选择距离最近的邻接图斑os;将os和oc对比,如果os和oc满足约束规则r1、r2和r3,则os被接受为与oc属于相同目标源的图斑;将os添加到or中,同时os替换oc进行下一步的扩展探索;从步骤1到步骤5是迭代过程,当不满足三个约束规则中的任何一个时,迭代扩展终止并返回or。
23.具体的,当围绕中心图斑的扩展迭代终止时,输出一组均匀且空间连续的区域or,使用基于骨架的对象线性指数和平均道路宽度用于描述图斑组成的区域or的空间特征。
24.具体的,所述道路提取模块过程如下:基于多尺度协同表示和图割算法的道路提取,选用基于多尺度协同表示方法,使用训练样本的线性组合来表示一个测试样本,得到每个物体在一定尺度上的道路概率,同一物体中的所有像素都被赋予一个与该物体相同的似然值,将三个不同尺度的所有道路概率图融合为一个整体,最后得到每个像素的道路可能性;给定图像i,gc算法构造无向图g={υ,ε},υ表示图像中的像素的集合,ε表示相邻像素之间的无向图的边的集合。对于道路提取任务,为道路类别定义标签“1”,为非道路类别定义标签“0”。gc试图最小化以下区域项和边界项的目标函数,通过上述多尺度协同表示方法获得了道路概率图,以此分割图像。
25.在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
26.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
27.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。