1.本技术涉及一般的图像数据处理技术领域,特别涉及一种球面六边形格网的局部等距性优化方法和系统。
背景技术:
2.全球离散格网(球面格网)是基于球面的一种可以无限细分,但又不改变形状的地球体拟合格网,当细分到一定程度时,可以达到模拟地球表面的目的,有望从根本上解决平面模型在全球空间管理与多尺度操作上的数据断裂、几何变形和拓扑不一致等问题,能为区域气候模拟研究提供一个连续的、全球统一的分析框架。
3.格网与邻近格网中心点距离的一致性(即格网等距性)是衡量球面格网质量的方式之一,格网的等距性能保证变量在各方向传播的等概率性,对于区域气候模拟十分重要。然而,球面与平面拓扑不同胚,无法直接获得完全等距的球面离散格网。
4.近年来,国际学术界和相关应用部门认为球面格网质量影响基于全球离散格网的数值计算精度,因此从不同的侧面对全球离散格网进行了优化,包括格网边与对偶边中点距离最小化、格网中心点与质心的重合度、格网整体均匀性、格网与邻近格网的距离一致性等。
5.其中,格网边与对偶边中点距离最小化优化方法,以两中点间距离与公共边长度之比的四次幂为总代价函数,利用梯度下降法迭代调整格点位置获得代价函数的全局最优化解。该方法减小了任意相邻格网两中点间距离,同时格网面积变化范围缩小了20%,但格网与邻近格网的距离一致性降低了5%。格网中心点与质心的重合度优化方法,利用球面质心voronoi剖分方法(spherical centroidal voronoi tessellations,scvt)将格网中心迭代移动至格网质心,最大化两心重合度。但学者们对比多种优化格网几何特征发现,scvt法所优化格网的面积均匀性和距离一致性较差。
6.格网整体均匀性优化方法,利用球面最优传输理论,设计格网面积优化核心算法,根据格网几何特征对数值模拟精度的影响权重,确定格网均匀性整体优化模型的收敛条件。该方法所优化格网将面积变形缩小了20%,距离一致性提高了1%,最大程度地保留了球面格网两中点间距离的稳定性。针对递归方法所构建球面格网的几何特征,设计了逐点优化方案。它不直接使用父格网边界中点生成子格网,而用父格网的邻近格网中点连线所形成三角形的中心点代替,该方法将距离一致性提高了2%。但该优化方法仅适用于特定的格网模型。
7.距离一致性优化法,假设邻近格网点用弹簧连接,格点分布的不均匀性导致弹簧拉长(或压缩),具体表现为格点间距离增大(或减小)。通过调整格点的位置最小化弹簧伸长(或压缩)量,提高格点距离均匀性,减少格网几何特征突变。弹簧的伸长(或压缩)量与静止状态时的弹簧长度相关,该学者将静止状态时的弹簧长度定义为在赤道上均匀分布点之间距离的均值与弹性系数之积。格网距离一致性与所设置的弹性系数相关,若弹性系数大于1.2会导致处于球面多面体顶点附近的格网塌陷;若系数小于1.05则不会出现塌陷,但该
顶点附近会存在格网聚集,适宜的参数设置是该优化方法的关键。
8.上述方法从不同角度提高了格网与邻近格网距离一致性,但仍然存在如下不足:(1)现有格网优化方法是对整个球面格网进行的,是一种全局优化法,通过迭代优化获得全局最优解。但这种方法计算量较大,同时因为球面与平面不同胚,全局优化无法获得最优解,其随着迭代次数的增加,变形较大的格网逐渐累积到正多面体顶点或边界处。
9.(2)格网的等距性依赖于迭代约束条件和优化参数的设置,上述优化方法的参数设置是一种经验值,缺乏理论依据。
10.因此,需要提供一种针对上述现有技术不足的改进技术方案。
技术实现要素:
11.本技术的目的在于提供一种球面六边形格网的局部等距性优化方法和系统,以解决球面格网不等距的问题,提高局部格网等距性,为区域动态扩散模拟提供计算框架。
12.为了实现上述目的,本技术选用格网相对较为均匀的球面二十面体六边形格网作为基础格网,针对现有优化方法存在的问题,提供如下技术方案:本技术提供了一种球面六边形格网的局部等距性优化方法,包括:根据球面格网中各格网单元的等距性指标,建立所述球面格网的等距性频率直方图;根据所述球面格网的等距性频率直方图中各等距性区间所对应格网单元集合,获取所述球面格网的等距性量化结果;基于所述球面格网对应多面体的初始定位参数以及空间分辨率,对局部研究区域进行格网化,得到所述局部研究区域对应的格网单元;根据所述局部研究区域对应的格网单元与所述球面格网的等距性量化结果之间的位置关系,确定局部待优化格网;基于所述球面格网的等距性频率直方图,确定等距性优化参数,并根据所述等距性优化参数,对所述局部待优化格网进行位置调整,得到局部等距性优化结果。
13.优选地,所述格网单元的等距性指标用格网单元与邻近格网单元中心点间距离的最小值与最大值之比来表示,所述等距性指标的计算公式如下:式中,表示格网单元gi与邻近格网单元gj的中心点间距离,i、j均为正整数,edi为第i个格网单元的等距性指标。
14.优选地,根据球面格网中各格网单元的等距性指标,建立所述球面格网的等距性频率直方图,具体为:针对所述球面格网中的格网单元集合,逐个格网单元计算所述等距性指标;根据所述球面格网的特征以及预先获取的等距性优化目标,确定等距性区间间隔;根据所述等距性区间间隔,确定所述球面格网的等距性频率统计结果,并绘制所
述球面格网的等距性频率直方图。
15.优选地,根据所述球面格网的等距性频率直方图中各等距性区间所对应格网单元集合,获取所述球面格网的等距性量化结果,具体为:根据所述等距性频率直方图中各等距性区间,确定所述球面格网的等距性频率统计结果;建立所述球面格网的等距性频率统计结果与颜色的映射关系,得到等距性颜色表;基于所述等距性颜色表,对所述球面格网进行可视化,得到格网等距性空间分布图;根据格网等距性空间分布图,确定所述等距性频率直方图中的各个等距性区间对应的球面格网集合的边界轮廓线,以获取所述球面格网的等距性量化结果。
16.优选地,根据所述局部研究区域对应的格网单元与所述球面格网的等距性量化结果之间的位置关系,确定局部待优化格网,具体为:根据所述局部研究区域与所述球面格网的相对位置关系,确定所述球面格网上覆盖所述局部研究区域的格网单元集合;依据所述球面格网上覆盖所述局部研究区域的格网单元集合的等距性指标,确定覆盖格网等距性;调整所述球面格网对应多面体的定位参数,直到覆盖格网等距性达到最大;在覆盖格网等距性最大的情况下,求出所述球面格网上覆盖所述局部研究区域的格网单元集合与所述局部研究区域落入等距性最优区间的格网单元之差,得到所述局部待优化格网。
17.优选地,所述等距性优化参数包括等距性距离优化参数,基于所述球面格网的等距性频率直方图,确定等距性优化参数,具体为:计算所述球面格网的等距性频率直方图中各个等距性区间对应的格网单元集合的等距性指标均值μ
histed
;计算球面格网的等距性频率直方图中等距性最优区间的格网单元集合的等距性指标均值μ
ed
;统计球面格网中各格网单元与邻近格网单元的中心点距离,并计算其均值,得μ
cd
;计算μ
histed
与μ
ed
之差,得到等距性距离优化参数(μ
cd
,d)。
18.优选地,根据所述等距性优化参数,对所述局部待优化格网进行位置调整,得到局部等距性优化结果,具体为:遍历所述局部待优化格网中的每个待优化格网单元,根据所述等距性优化参数和格网中心点距离均值,计算当前待优化格网单元的等距性优化距离d;以所述球面格网中等距性指标最大的格网单元中心点指向当前待优化格网单元中心的方向作为格网移动方向o;基于等距性优化距离d以及格网移动方向o,调整当前待优化格网单元的位置;完成遍历后即可得到局部等距性优化结果。
19.优选地,所述方法还包括:基于球面连续场分别计算未优化的球面格网和局部等距性优化结果的散度算子、
梯度算子,比较未优化的球面格网的离散化精度与局部等距性优化结果的离散化精度。
20.本技术实施例提供一种球面六边形格网的局部等距性优化系统,包括:直方图建立单元,配置为根据球面格网中各格网单元的等距性指标,建立所述球面格网的等距性频率直方图;量化获取单元,配置为根据所述球面格网的等距性频率直方图中各等距性区间所对应格网单元集合,获取所述球面格网的等距性量化结果;局部格网化单元,配置为基于所述球面格网对应多面体的初始定位参数以及空间分辨率,对局部研究区域进行格网化,得到所述局部研究区域对应的格网单元;待优化格网确定单元,配置为根据所述局部研究区域对应的格网单元与所述球面格网的等距性量化结果之间的位置关系,确定局部待优化格网;格网优化单元,配置为基于所述球面格网的等距性频率直方图,确定等距性优化参数,并根据所述等距性优化参数,对所述局部待优化格网进行位置调整,得到局部等距性优化结果。
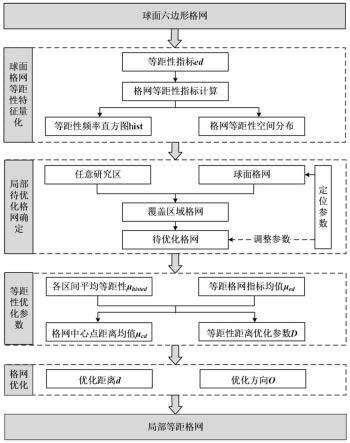
21.有益效果:本技术的上述技术方案中,首先量化格网等距性特征,包括:以格网与邻近格网中心点最小最大距离之比为等距性指标;逐格网计算,得频率直方图及其空间分布;绘制不同区间边界轮廓线,得球面格网的等距性量化结果。其次,确定局部待优化格网,包括:调整球面格网的定位参数,最大化覆盖格网等距性比例,得到局部待优化格网。然后,确定等距性优化参数:计算各等距性区间指标均值与最大值之差、等距格网平均间隔,确定等距性优化距离;由等距格网确定格网移动方向。最后,对局部待优化格网进行位置调整。通过上述技术方案,解决了现有技术中球面六边形格网等距性优化方法无法获得全局最优解,以及优化参数缺乏理论依据的问题,提高了研究区域的局部格网等距性,并将区域微分算子离散化平均精度至少提升了约30%。
附图说明
22.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。其中:图1为根据本技术的一些实施例提供的球面六边形格网的局部等距性优化方法的流程逻辑图;图2为根据本技术的一些实施例提供的球面六边形格网的局部等距性优化方法的流程示意图;图3为根据本技术的一些实施例提供的球面六边形格网的剖分示意图;图4为根据本技术的一些实施例提供的球面六边形格网等距性频率直方图;图5为根据本技术的一些实施例提供的等距性空间分布图;图6为根据本技术的一些实施例提供的等距性量化结果示意图;图7为研究区域位置图;图8为根据本技术的一些实施例提供的研究区域格网化结果示意图;图9为根据本技术的一些实施例提供的局部等距性优化结果示意图;图10为根据本技术的一些实施例提供的离散化算子示意图;
图11为根据本技术的一些实施例提供的散度算子离散化误差曲线图;图12为根据本技术的一些实施例提供的梯度算子离散化误差曲线图;图13为根据本技术的一些实施例提供的球面六边形格网的局部等距性优化系统的结构示意图。
具体实施方式
23.球面正多面体格网是构建全球离散网格方法之一,其基本思想是把理想多面体(如正四面体、正六面体、正八面体、正十二面体、正二十面体)的边投影到球面上作为大圆弧段,形成球面多边形(如三角形、四边形、五边形、六边形)的边并覆盖整个球面,作为全球剖分的基础;然后对球面多边形进行递归剖分,形成全球连续的、近似均匀的球面层次格网结构。与其他多边形相比,六边形具有一致的邻近关系,因此被广泛应用于区域动态扩散模拟,如区域气象模式计算。
24.本技术选用格网相对较为均匀的球面二十面体六边形格网作为基础格网,以基于fuller投影的球面二十面体四孔六边形格网(fuller4h)为例,结合附图、实施例来详细说明本技术。
25.示例性方法本技术实施例提供一种球面六边形格网的局部等距性优化方法,如图1~图2所示,该方法包括:步骤s101、根据球面格网中各格网单元的等距性指标,建立球面格网的等距性频率直方图。
26.图3示出了任意分辨率的球面六边形格网剖分的一个示例,其中,图3的(a)部分为球面正二十面体六边形格网示意图;图3中的(b)部分为球面六边形格网中各格网单元与其邻近格网单元中心点距离示意图。如图3中的(a)、(b)部分所示,每个格网单元包括六个顶点(空心圆点)和一个中心点(实心圆点),在球面格网的格网单元集合中,如果格网单元i与格网单元j具有至少一条相同的边(共边),则称格网单元i与格网单元j互为邻近格网单元,格网单元i到格网单元j的距离为格网单元i的中心点与格网单元j的中心点的连线。
27.其中,各格网单元的等距性指标也叫做格网单元的等距性描述子,用格网单元与邻近格网单元中心点间距离的最小值与最大值之比来表示,等距性指标的计算公式如下:(1)式中,表示格网单元gi与邻近格网单元gj的中心点间距离,i、j均为正整数,j=0,1,2,3,4,5,edi为第i个格网单元的等距性指标。
28.从上式可以得出,等距性指标的最大值为1,等距性指标越大,说明格网的等距性越强。
29.需要说明的是,利用公式(1)可以对六边形以外的其他球面多边形(如三角形、四边形、五边形)计算等距性指标,此时,只需要根据多边形的边数改变j的取值即可,例如,对于五边形,j取值为0,1,2,3,4。
30.为了获取等距性频率直方图,一些实施例中,根据球面格网中各格网单元的等距性指标,建立球面格网的等距性频率直方图,具体包括如下步骤:针对球面格网中的格网单元集合,逐个格网单元计算等距性指标,其中,第i个格网单元gi的等距性指标取值用edi表示。根据球面格网的特征以及预先获取的等距性优化目标,也就是等距性优化需求,确定等距性区间间隔;根据等距性区间间隔,确定球面格网的等距性频率统计结果,并绘制球面格网的等距性频率直方图hist。
31.在一个示例中,设等距性区间间隔=0.025,统计fuller4h在第6层和第7层各个格网单元的等距性指标取值edi在各等距性区间的比例(即等距性频率),结果如表1所示:根据表1绘制对应的等距性频率直方图,绘制结果如图4所示,其中,图4的(a)部分是fuller4h格网第6层的统计结果,图4的(b)部分是fuller4h格网第7层的统计结果。
32.步骤s102、根据球面格网的等距性频率直方图中各等距性区间所对应格网单元集合,获取球面格网的等距性量化结果。
33.为获取球面格网的等距性量化结果,在一些实施例中,根据球面格网的等距性频率直方图中各等距性区间所对应格网单元集合,获取球面格网的等距性量化结果,具体为:根据等距性频率直方图中各等距性区间,确定球面格网的等距性频率统计结果;建立球面格网的等距性频率统计结果与颜色的映射关系,得到等距性颜色表;基于等距性颜色表,对球面格网进行可视化,得到格网等距性空间分布图;根据格网等距性空间分布图,确定等距性频率直方图中的各个等距性区间对应的球面格网集合的边界轮廓线,以获取球面格网的等距性量化结果。
34.其中,球面格网的每一个层次均由大量格网单元组成,落入每一个等距性区间的格网单元形成相应的格网单元集合,即为球面格网的等距性频率统计结果。
35.参照表1,当等距性区间间隔
∆
=0.025时,第6层和第7层的fuller4h格网单元分布在7个等距性区间中,其中,在等距性区间[0.825,0.85)中的格网单元比例为0,也就是说,第6层和第7层没有格网单元分布在[0.825,0.85)及以下的取值范围;[0.975,1]是等距性指标取值最高的区间,第6层的fuller4h格网单元共有0.028比例落入了该区间内,第7层的fuller4h格网单元共有0.026比例落入该区间内。为了方便描述,将其称为等距性最优区间。
[0036]
在上述等距性频率统计结果的基础上,建立球面格网的等距性频率统计结果与颜色的映射关系,得到等距性颜色表,并基于等距性颜色表,对球面格网进行可视化,得到格网等距性空间分布图。其中,球面网格可视化可以通过现有的可视化工具实现,例如通过gis软件提供的分层设色图进行可视化。
[0037]
需要说明的是,球面二十面体由多个基础三角面构成,由于球面二十面体的格网具有对称性,每个基础三角面等距性空间分布特征相同,因此,本技术实施例以fuller4h格网的一个基础三角面为例,根据等距性频率直方图及其颜色表绘制等距性空间分布图,结果如图5所示,其中,图5的(a)部分为fuller4h格网第6层一个基础三角面的等距性空间分布图,图5的(b)部分为fuller4h格网第7层一个基础三角面的等距性空间分布图,颜色越深,格网等距性越差。
[0038]
在获取格网等距性空间分布图之后,还包括:根据格网等距性空间分布图,确定等距性频率直方图中的各个等距性区间对应的球面格网集合的边界轮廓线,以获取球面格网的等距性量化结果,结果如图6所示,该等距性量化结果为综合fuller4h格网各层次空间分布特征得到的。根据等距性量化结果,结合图5、图6可以看出,fuller4h格网等距性的空间分布模式呈类六边形分布,其中,等距性最优区间对应的格网单元集合形成一个小六边形,处于基础三角面的中心;围绕上述基础三角面中心的小六边形,不同等距性区间从基础三角面中心向外扩散,形成六边形环状区域,所对应格网等距性逐渐减小。不同等距性区间内格网单元所对应地球表面积比例统计如表2所示:从表2可以看出,落入等距性最优区间对应的格网单元集合对应地球表面积比例为2.5%,也就是说,在该球面格网中,有2.5%的地球表面积对应的格网单元具有最优的等距性,格网质量较佳。
[0039]
步骤s103、基于球面格网对应多面体的初始定位参数以及空间分辨率,对局部研究区域进行格网化,得到局部研究区域对应的格网单元。
[0040]
由于不同具体研究区域所处的地理位置和范围不同,其与球面格网对应的格网单元的覆盖关系和所需要的空间分辨率也不同,因此,在研究区域的地理位置和范围确定之后,需要根据球面格网对应多面体的初始定位参数以及空间分辨率对该局部研究区域进行格网化,以生成该局部研究区域对应的格网单元。
[0041]
具体实施时,首先设计球面格网对应多面体的初始定位参数。其中,球面二十面体格网的初始定位参数可以包括:一个顶点坐标、第二个顶点相对于该顶点的方位角。本技术实施例中,将球面二十面体的一个顶点定位于北极点,与该顶点连接的第二个顶点定位于本初子午线上,所对应的参数为(0
°
n,0
°
e),方位角为0
°
。然后,确定空间分辨率,其中,研究
区域的空间分辨率可以根据实际需要确定。接着,根据上述初始定位参数和空间分辨率,格网化研究区域。
[0042]
作为一个示例,本技术选择位于北美的a地区和我国的b地区作为研究区域,对应的位置如图7所示,其中,图7中的(a)部分表示a地区的地理位置,图7中的(b)部分表示b地区的地理位置。在此基础上,通过上述步骤分别对两个研究区域进行格网化,得到初始定位参数下两个研究区域对应的格网单元。
[0043]
随后,在初始定位参数的控制下,初步统计覆盖研究区域的格网单元等距性情况,此时,两个研究区均处于fuller4h格网的基础三角面边缘,覆盖区域的格网等距性较差,为此进入下一步骤,即调整格网定位参数。
[0044]
步骤s104、根据局部研究区域对应的格网单元与球面格网的等距性量化结果之间的位置关系,确定局部待优化格网。
[0045]
如前所述,在覆盖区域的格网等距性较差的情况下,需要对球面格网的定位参数进行调整,以确定研究区域的待优化格网。
[0046]
为获取研究区域的待优化格网,在一些实施例中,根据局部研究区域对应的格网单元与球面格网的等距性量化结果之间的位置关系,确定局部待优化格网,具体包括如下步骤:根据局部研究区域与球面格网的相对位置关系,确定球面格网上覆盖局部研究区域的格网单元集合;依据球面格网上覆盖局部研究区域的格网单元集合的等距性指标,确定覆盖格网等距性;调整球面格网对应多面体的定位参数,直到覆盖格网等距性达到最大;在覆盖格网等距性最大的情况下,求出球面格网上覆盖局部研究区域的格网单元集合与局部研究区域落入等距性最优区间的格网单元之差,得到局部待优化格网。
[0047]
本技术实施例中,覆盖格网等距性用覆盖局部研究区域的格网单元集合的等距性指标之和来表示。以a地区和b地区为例,调整定位参数,最大化覆盖格网等距性比例具体步骤如下:首先,观察两个研究区域的几何形态,然后根据几何形态,分别迭代调整格网定位参数。从图中可以看出,a地区近似一个狭长的矩形,而fuller4h格网的等距性量化特征为一个类六边形,也就是说,该研究区域无法完全被等距性最优的格网单元形成的区域所覆盖,需要对定位参数进行调整。通过迭代多次调整定位参数,并计算调整后的覆盖局部研究区域的格网单元集合的等距性指标之和,直至覆盖格网等距性达到最大,也就是说,需要最大化覆盖区域的格网等距性。其中,在覆盖格网等距性达到最大时,基于fuller4h格网第10层的格网化结果如图8所示,从如图8的(a)部分可以看出,a地区尚未被等距性最优的格网单元完全覆盖。b地区形状方正,调整球面格网的定位参数使覆盖格网等距性达到最大后,其能够完全被等距性最优的格网单元形成的区域所覆盖,其格网化结果参见图8的(b)部分。两个研究区域的覆盖格网等距性情况统计如表3所示。
[0048]
最后,统计调整后各研究区域内格网单元,提取出非等距格网单元,即在覆盖格网等距性最大的情况下,求出球面格网上覆盖局部研究区域的格网单元集合与局部研究区域
落入等距性最优区间的格网单元之差,得到局部待优化格网grid
un
。
[0049]
对于a地区,局部待优化格网grid
un
为球面格网上覆盖局部研究区域的格网单元集合与局部研究区域落入等距性最优区间的格网单元之差;对于b地区而言,因为调整定位参数后,其能够完全被等距性最优的格网单元形成的区域所覆盖,故它对应的grid
un
为空。
[0050]
步骤s105、基于球面格网的等距性频率直方图,确定等距性优化参数,并根据等距性优化参数,对局部待优化格网进行位置调整,得到局部等距性优化结果。
[0051]
在获取局部待优化格网后,需要确定相应的等距性优化参数以对局部待优化格网进行优化。在一些实施例中,基于球面格网的等距性频率直方图,确定等距性优化参数,具体为:计算球面格网的等距性频率直方图中各个等距性区间对应的格网单元集合的等距性指标均值μ
histed
,也就是计算fuller4h格网中处于不同等距性区间的等距性指标ed的均值;计算球面格网的等距性最优区间的格网单元集合的等距性指标均值μ
ed
,也就是计算fuller4h格网中ed处于[0.975,1]区间内格网单元的等距性指标的均值;统计球面格网中各格网单元与邻近格网单元的中心点距离,即统计fuller4h格网中心点距离,并计算其均值,得μ
cd
;计算μ
histed
与μ
ed
之差:,得到等距性距离优化参数(μ
cd
,d)。
[0052]
在一些实施方式中,根据等距性优化参数,对局部待优化格网进行位置调整,得到局部等距性优化结果,具体为:遍历局部待优化格网grid
un
中的待优化格网单元,根据等距性优化参数,计算当前待优化格网单元的等距性优化距离d;以球面格网中等距性指标最大的格网单元中心点指向当前待优化格网单元中心的方向作为格网移动方向o;基于等距性优化距离d以及格网移动方向o,调整当前待优化格网单元的位置;完成遍历后即可得到局部等距性优化结果。
[0053]
由于b地区的grid
un
为空,本技术实施例中,仅对a地区的grid
un
进行位置调整。针对a地区的grid
un
中的当前待优化格网单元,通过计算等距性优化距离d;针对fuller4h的等距性特征,以最大值所对应格网单元中心指向当前待优化格网单元中心的方向作为fuller4h格网的移动方向。
[0054]
按上述步骤确定等距性优化距离d和格网移动方向o,调整格网位置,得到局部等距性优化结果,优化后的a地区覆盖区格网结果如图9所示。
[0055]
通过以上实施例的技术方案,对球面六边形格网的局部等距性进行优化,为区域的动态模拟、区域数值计算提供等距格网,从而提高模拟和计算精度。
[0056]
为验证本技术的格网等距性优化的有效性,一些实施例中,还包括:基于球面连续场分别计算未优化的球面格网和局部等距性优化结果的散度算子、梯度算子,比较未优化的球面格网的离散化精度与局部等距性优化结果的离散化精度。
[0057]
以a地区为例,基于未优化的fuller4h格网和经局部等距性优化后的格网,基于球面连续场分别计算散度算子、梯度算子,并比较在不同格网上的离散化精度。
[0058]
本技术实施例中,所选择的球面连续场为williamson纬向流测试模型中大气风场的初始位势高度和速度,定义如下:(2)
其中,u表示标量场;h表示风场位势高;φ表示坐标点的纬度;地球半径a=6371.007km;地球自转速度ω=7.292
×
10
−5rad/s;重力加速度g=9.806m/s2;初始位势高h0=3
×
104m;初始风场速度u0=20m/s。
[0059]
参见图10,本技术实施例以c-grid模式离散化散度算子和梯度算子,设在球面六边形格网上存在矢量场v和标量场u,任意六边形格网p的中点记为q,面积记为a,格网边的中点记为cq,l是六边形格网边长,l是具有共享边的两个六边形格网中心点连线长度,是格网边的单位法向量,方向为垂直边向外。
[0060]
根据高斯散度定理和格林-高斯公式定义在六边形格网中心点q的散度和梯度的离散化形式如下:(3)其中,ns表示格网的邻近单元数,ns=5或6。
[0061]
散度算子和梯度算子的离散化误差用解析解(f
ana
)与数值解(f
num
)计算,具体公式如下:(4)其中,n为研究区域内格网单元总个数;表示算子离散化最大误差;l2表示算子离散化的平均误差。
[0062]
基于球面格网的第6~8层模拟的误差如表4、5所示:
散度算子离散化和梯度算子离散化对应的曲线图如图11、图12所示。图11中(a)部分和(b)部分分别是基于未优化格网和通过本技术实施例的方法所得格网离散化散度算子的平均误差和最大误差,已用不同的曲线标出。图12中的(a)部分和(b)部分分别是基于未优化格网和本发明所得格网离散化散度算子的平均误差和最大误差,已用不同曲线做出标识。
[0063]
实验表明,基于本技术实施例提供的方法,a地区和b地区完全被等距格网所覆盖,通过局部格网优化,a地区的等距格网覆盖率提高了约60%。与未优化格网相比,基于本技术实施例提供的方法得到的优化格网的离散化梯度算子和散度算子的平均误差降低了约30%和80%,最大误差降低了约10%和99%。
[0064]
综上所述,本技术实施例的技术方案确定了等距性的分区特征,为基于球面六边形格网的区域动态模拟提供了格网选择依据。同时可依据分区特征,调整格网定位参数,以保证该研究区被尽可能多的等距格网所覆盖。对待优化格网,根据本发明优化参数确定方法计算等距性优化方向和距离,解决了原有算法优化参数缺乏理论依据的问题。本技术提高了覆盖区域格网的等距性,为区域内动态模拟、数值计算等提供等距格网,有效减小计算误差。
[0065]
示例性系统本技术实施例提供一种球面六边形格网的局部等距性优化系统,如图13所示,该系统包括:直方图建立单元1301、量化获取单元1302、局部格网化单元1303、待优化格网确定单元1304和格网优化单元1305。其中:直方图建立单元1301,配置为根据球面格网中各格网单元的等距性指标,建立球面格网的等距性频率直方图;量化获取单元1302,配置为根据球面格网的等距性频率直方图中各等距性区间所对应格网单元集合,获取球面格网的等距性量化结果;局部格网化单元1303,配置为基于球面格网对应多面体的初始定位参数以及空间分辨率,对局部研究区域进行格网化,得到局部研究区域对应的格网单元;待优化格网确定单元1304,配置为根据局部研究区域对应的格网单元与球面格网的等距性量化结果之间的位置关系,确定局部待优化格网;格网优化单元1305,配置为基于球面格网的等距性频率直方图,确定等距性优化参数,并根据等距性优化参数,对局部待优化格网进行位置调整,得到局部等距性优化结果。
[0066]
本技术实施例提供的球面六边形格网的局部等距性优化系统,能够实现上述任一
实施例的球面六边形格网的局部等距性优化方法的步骤、流程,并达到相同的技术效果,在此不再一一赘述。
[0067]
以上所述仅为本技术的优选实施例,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。