1.本发明涉及一种基于点扩散函数解算的大景深条纹投影三维测量方法,属于计算机视觉技术领域。
背景技术:
2.光学三维测量技术已广泛应用于工业检测、智能制造、逆向工程等领域。条纹图案轮廓测量法(fpp)因其成本低、高精度和高速而成为最流行的领域之一。fpp算法通过对场景进行空间或时间编码条纹照明,并从观测到的变形条纹中恢复深度信息。大多数fpp系统使用固定焦距的大孔径镜头,以最大限度地提高光通量效率,导致测量大深度变化场景时精度下降和失去细节。即使是大景深的系统,捕获的条纹很难是理想的尖锐,由于透镜像差,衍射极限和可能的运动模糊。
3.扩展二维成像的自由度,特别是在计算摄影领域得到了广泛的研究。根据所使用的模糊核,这些计算方法可以分为深度相关方法和深度不变方法,深度相关方法包括盲反卷积、编码孔径和多点对焦;深度不变法是指波前编码、扩散编码和聚焦扫描。点扩散函数(psf),也被称为成像系统的脉冲响应,在曝光过程中会导致不可避免的图像退化。虽然可以通过改善采集条件来防止外部模糊,如相机运动,但光学系统的固有特性,如透镜像差和衍射,也对图像质量有深刻的影响。在图像恢复的前提条件下,精确测量psf可以对图像恢复得到非常显著的提升。
4.如今单像素成像技术被引入用于测量psf的难点,例如,盲psf估计技术和非盲psf估计技术往往假设空间不变psf,使用类点光源的低信噪比问题,以及基于激光光束的方法不适用于空间变化psf的测量。因此,如何利用spi准确测量空间变化psf辅助大景深下的fpp系统进行准确的三维测量具有很高的研究价值。
技术实现要素:
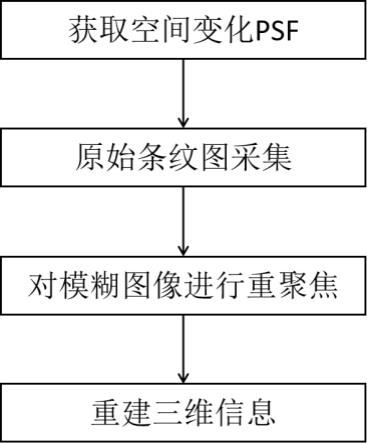
5.为了解决上述技术问题,本发明提供一种基于点扩散函数解算的大景深条纹投影三维测量方法,其具体技术方案如下:一种基于点扩散函数解算的大景深条纹投影三维测量方法,包括以下步骤:步骤一:设计编码条纹图片:通过投影仪对待测量物体投出基于傅里叶单像素成像(fsi)的编码条纹图片;步骤二:将步骤一通过工业相机拍摄得到的经过物体调制后的编码条纹图片用来求得傅里叶系数切片;步骤三:求得点扩散函数:将步骤二所得的傅里叶系数切片通过傅里叶逆变换得到psf;步骤四:采集待测物体条纹图像:通过三维测量系统采集待测物体的原始失焦图像;步骤五:获取全聚焦图像:通过步骤三得到的空间变化psf对步骤四中三维测量系
统采集得到的失焦图像进行反卷积获取全聚焦图像;步骤六:重建三维信息:通过步骤五得到的全聚焦图像通过相位恢复,相位展开后结合标定参数对相位重建出待测物体的三维信息。
6.进一步的,所述步骤一:对待测量物体投出基于傅里叶单像素成像(fsi)的条纹图用以下数学公式表示:,,其中表示像素坐标,表示空间频率,表示背景光强,表示条纹图案的调制度,表示初始相位。
7.进一步的,所述步骤一中,由于相机一个像素的可见光面积小于128
×
128像素,因此投影条纹图被设计为周期为128像素的周期性扩展条纹。
8.进一步的,所述步骤二中傅里叶系数的切片用以下的公式计算:,,其中,和分别表示单像素探测器对垂直和水平二维正弦条纹反射光的响应,是与单像素探测器的灵敏度和位置相关的系数。
9.进一步的,所述步骤三中psf的推导过程可以由以下公式计算:,,其中,表示一维傅里叶逆变换。
10.进一步的,所述步骤四中三维测量系统包括投影仪、相机和计算机,即条纹投影轮廓术fpp,条纹投影轮廓术通过结合基于单像素测量点扩散函数(psf)的方式以扩大相机的自由度,单像素编码条纹与fpp编码条纹都由同一台投影仪投出,三维测量系统采集待测物体的原始条纹图片的具体步骤为:利用计算机设置固定间隔的条纹光栅,通过投影仪投射一组正弦条纹图像,经待测物体反射后经相机接收。
11.进一步的,所述步骤五中,三维测量系统中的相机的失焦用数学模型表示为聚焦条纹与高斯函数的卷积,二维的高斯函数由下式表示:,
其表达式为标准差为的二维正态分布,均值点为;所述卷积选用lucy-richardson反卷积方式,通过迭代的方式得到结果的,这种迭代的方式通常能够比直接求解的方式得到更好的结果,这是一种非线性的的方法,由下式表述:,其中,为未模糊的清晰图像,为模糊函数,为拍到的失焦图像,为迭代次数。
12.进一步的,所述步骤六中将步骤五得到的全聚焦图像代入到下式中,计算得到包裹相位:,式中,为像素坐标,为相移数,为编码的相位值,为相移步数;基于格雷码的方式将包裹相位展开得到绝对相位用如下公式表示:,式中,为整数,被称为条纹级次,为绝对相位,为条纹频率;将绝对相位与标定参数结合对相位重建出待测物体的三维信息。
13.本发明的工作原理是:本发明基于傅里叶单像素成像的高信噪比特性,得到高信噪比的空间变化psf,在二维上恢复了由于离焦而拍摄到的模糊图像,从而恢复被测量物体的三维信息。本发明方法通过标定大景深下空间变化的点扩散函数,反卷积恢复相机失焦拍到的模糊图像,实现了大景深下的三维重建。本发明方法能有效拓展传统fpp的景深范围,使景深提高到原来的2倍。实验结果表明,本发明方法能够实现高分辨率、高精度的三维形状测量,同时实时地提高了三维测量的景深。
14.本发明的有益效果是:(1)本发明方法基于spi的技术,因此,在相同的相机曝光时间下,可以实现比传统psf测量方法更高的信噪比测量。
15.(2)与其他的光学三维测量系统的工作范围扩展方法相比,本发明方法不需要其他的硬件支持,更适合于fpp领域。
附图说明
16.图1是本发明方法中的流程示意图;图2是本发明方法中的实施例与传统fpp成像三维重建示意图;图中:(a)为原始模糊图像,(b)为传统fpp得到的三维效果图,(c)为本发明的三维效果图;图3是本发明方法中的实施例位于40cm处的细节对比;图中:(a)为传统fpp得到的三维效果图,(b)为本发明的三维效果图;图4是本发明方法中的实施例位于75cm处的细节对比;图中:(a)为传统fpp得到的三维效果图,(b)为本发明的三维效果图;图5是本发明方法中的实施例位于120cm处的细节对比;图中:(a)为传统fpp得到的三维效果图,(b)为本发明的三维效果图。
具体实施方式
17.现在结合附图对本发明作进一步详细的说明。
18.本发明的基于单像素测量点扩散函数的大景深下的条纹投影三维测量方法的实施例包括如下步骤:步骤一:对待测量物体投出单像素编码条纹,投出的基于傅里叶单像素成像(fsi)的条纹图可以用以下数学公式表示:,,其中表示像素坐标,表示空间频率,表示背景光强,表示条纹图案的调制度,表示初始相位。
19.特别的,根据的实验,由于相机一个像素的可见光面积小于128
×
128像素,因此投影条纹被设计为周期为128像素的周期性扩展条纹,以此可以大大减少传统fsi所需图案数量。
20.步骤一中的编码条纹选择基于傅里叶单像素成像(spi)方式的条纹,由于spi所需条纹图数量与重建图像的分辨率成正比,因此如果图像分辨率降低,条纹图数量就会减少。待成像物体通常在重建图像中占据部分区域。如果仅对目标区域进行spi,则在不降低图像质量的前提下,可以显著减少投影模式的数量和时间消耗。
21.步骤二:对拍到的图求得傅里叶系数切片。傅里叶系数的切片可以用以下的公式计算:,,其中,和分别表示单像素探测器对垂直和水平二维正弦条纹反射光的
响应,是与单像素探测器的灵敏度和位置相关的系数。
22.空间变化的psf作为物体和图像点之间的光传输系数。通过将单像素成像技术应用到相机成像平面的每个像素上,psf是从得到的光传输系数中提取的,即步骤三将傅里叶系数的切片通过傅里叶逆变换得到的就是psf一维投影。
23.步骤三:将步骤二所得的傅里叶系数的切片通过傅里叶逆变换得到psf,psf的推导过程可以由以下公式计算:,,其中,表示一维傅里叶逆变换。
24.步骤四:待测物体条纹图像采集:通过三维测量系统采集待测物体的原始条纹图像;三维测量系统包括投影仪、相机和计算机,即条纹投影轮廓术fpp,条纹投影轮廓术通过结合基于单像素测量点扩散函数(psf)的方式以扩大相机的自由度。单像素编码条纹与fpp编码条纹都由同一台投影仪投出。三维测量系统采集待测物体的原始条纹图片的具体步骤为:利用计算机设置固定间隔的条纹光栅,通过投影仪投射一组正弦条纹图像,经待测物体反射后经相机接收。
25.对于求得的psf的一维投影,可以通过高斯拟合得到标准差,选择用matlab自带的拟合工具箱,通过拟合一维高斯方程的系数c1,即是高斯模糊核的标准差乘,相机的psf可以用二维的高斯模糊模型来表示。
26.步骤五:获取聚焦图像:通过步骤三得到的空间变化psf对步骤四得到的失焦图像进行反卷积获取聚焦图像。通常,相机的失焦可以用数学模型表示为聚焦条纹与高斯函数的卷积。二维的高斯函数可以由下式表示:,其表达式为标准差为的二维正态分布,均值点为。本发明所用的lucy-richardson反卷积方式,是通过迭代的方式得到结果的。这种迭代的方式通常能够比直接求解的方式得到更好的结果,这是一种非线性的的方法,可以由下式表述:,其中,为未模糊的清晰图像,为模糊函数,为拍到的失焦图像,为迭代次数。
27.步骤五需要对不同景深下的待测物体结合空间变化的psf进行反卷积获取聚焦图
像即子聚焦图像,最后得到全聚焦图像,其中,选择lucy-richardson反卷积进行去模糊图像,并使用matlab 2016b中内置的deconvlucy()函数进行图像后处理。
28.如图2所示,所选取的大的测量景深(400mm,1200mm)其中包含三个处于不同景深下的物体,对三个物体分别位于400mm,750mm,1200mm处,在步骤四中得到的空间变化的psf应用于三个物体上分别对其进行重聚焦,重建三维点云信息。
29.步骤六:重建三维信息:通过步骤五得到的全聚焦图像通过相位恢复,相位展开后结合标定参数对相位重建出待测物体的三维信息;将步骤五得到的全聚焦图像代入到下式中:,式中,为像素坐标,为相移数,为编码的相位值,为相移步数。基于格雷码的方式将包裹相位展开得到绝对相位可以用如下公式表示:,式中,为整数,被称为条纹级次,为绝对相位,为条纹频率。将绝对相位与标定参数结合对相位重建出待测物体的三维信息。
30.为了验证本发明的效果,选用了三个置于不同景深范围下的物体进行了实验,最终实验结果如图2,3,4,5所示,可以证明本发明提出的基于单像素测量点扩散函数的大景深下的条纹投影三维测量技术利用设备在固定的焦距下,通过单像素测量空间变化psf实现图像的重聚焦可以有效的降低相机失焦带来的三维测量的误差,能够在较大的景深范围内实现高精度的三维测量。
31.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。