1.本实用新型属于智能工具库领域,尤其涉及一种工业机器人的智能工具库。
背景技术:
2.在工业生产生活中,一台工业机器人往往需要在同一工段完成多种工艺。由于工业机器人末端执行器通用性较差,因此工业机器人在完成一种工艺后需要快速更换末端执行器。工业机器人工作时每次只使用一个末端执行器,暂时未用到的末端执行器需要放置在工业机器人周围,其放置方式多采用固定式工具库分散放置。这种放置方式不仅杂论无章,且工业机器人每次更换末端执行器时都需要到达不同的更换位置,大大降低了工业机器人的工作效率,且由于更换点的不同,需要编制的工业机器人程序更为复杂。为此,研究并开发出一种多工位的可旋转的工业机器人用智能工具库机械结构具有十分重要的意义。
技术实现要素:
3.本实用新型的目的在于提供一种工业机器人的智能工具库,旨在解决现有技术中工业机器人每次更换末端执行器时都需要到达不同的更换位置,大大降低了工业机器人的工作效率的技术问题。
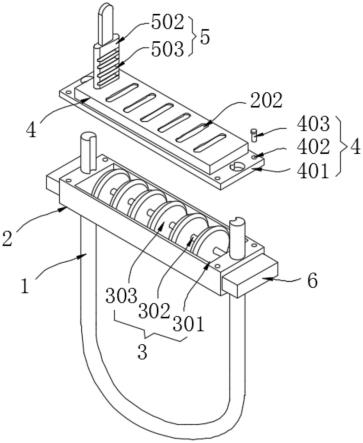
4.本实用新型是这样实现的,一种工业机器人的智能工具库,所述智能工具库包括安装支撑板,设置在所述支撑板上的电机安装座,设置在所述电机安装座上且置于所述安装支撑板底部的动力单元,设置在所述动力单元上且置于所述电机安装座上的工具安装座,及设置在所述工具安装座外周上的工具安装单元。
5.本实用新型的进一步技术方案是:所述智能工具库还包括设置在所述电机安装座外周且与所述工具安装单元位置相对的检测单元。
6.本实用新型的进一步技术方案是:所述动力单元包括设置在所述电机安装座上且贯穿所述安装支撑板的减速机,设置在所述减速机底部用于提供动力的步进电机,设置在所述减速机旋转轴上的联轴器,及设置在所述联轴器上法兰轴。
7.本实用新型的进一步技术方案是:所述工具安装单元包括设置在所述工具安装座上且前端呈u型结构的固定板,设置在所述固定板上且置于u型结构两侧的定位销,及设置在所述固定板上且置于u型机构内且通过所述定位销定位的末端执行器。
8.本实用新型的进一步技术方案是:所述监测单元包括设置在所述电机安装座外周上的安装支架,及设置在所述安装支架上用于检测是否存在工具的传感器。
9.本实用新型的进一步技术方案是:所述智能工具库还包括用于安装所述安装支撑板的安装底座。
10.本实用新型的进一步技术方案是:所述智能工具库还包括设置在所述电机安装座与所述工具安装座之间用于起到相对旋转运动的推力轴承。
11.本实用新型的有益效果是:此种智能工具库可以安装若干个工具安装单元,并且可以同时放置若干个不同功能的末端执行器,另外该智能工具库结构设计巧妙,能够实现
末端执行器精确定位放置,可以在plc等控制单元控制下实现自动化智能化,放置和抓取末端执行器,再者在该智能工具库中末端执行器放置集中,节约空间,能够快速自动化更换工业机器人末端执行器,大大提升工业机器人工作站的工作效率。
附图说明
12.图1是本实用新型实施例提供的一种工业机器人的智能工具库的结构图;
13.图2是本实用新型实施例提供的一种工业机器人的智能工具库的刨面图;
14.图3是本实用新型实施例提供的一种工业机器人的智能工具库的俯视结构图;
15.图4是本实用新型实施例提供的一种工业机器人的智能工具库的立体结构图;
16.图5是本实用新型实施例提供的一种工业机器人的智能工具库的工具安装单元局部放大图;
17.图6本实用新型实施例提供的一种工业机器人的智能工具库的末端执行器结构图。
具体实施方式
18.附图标记:1-安装底座 2-安装支撑板 3-步进电机 4-减速机 5-电机安装座 6-联轴器 7-法兰轴 8-工具安装座 9-固定板 10-推力轴承 11-安装支架 12-传感器 13-定位销 14-末端执行器。
19.图1-6了本实用新型提供的一种工业机器人的智能工具库,所述智能工具库包括安装支撑板1,设置在所述支撑板1上的电机安装座5,设置在所述电机安装座5上且置于所述安装支撑板1底部的动力单元,设置在所述动力单元上且置于所述电机安装座5上的工具安装座8,及设置在所述工具安装座8外周上的工具安装单元。所有零部件均直接或间接的安装在安装支撑板1,通过动力单元为工具安装座8提供动力,使工作安装座8可以进行转动,而末端执行器14则是安装在工具安装单元上,根据需求控制动力单元运动进而实现对工具安装单元的控制,而相对的工具安装单元为若干个,可以根据不同的需求进行所需设置,这样可以使智能工具库能存储更多的末端执行器14,以便满足工业机器人的多种操作需求,工具安装座8上可以根据需求设置多边形固定位,底部设置有安装推力轴承10的凹槽,而工具安装座8的作用是安装动力单元以及工具安装单元,并在动力单元的带动下实现旋转。
20.所述智能工具库还包括设置在所述电机安装座5外周且与所述工具安装单元位置相对的检测单元;所述监测单元包括设置在所述电机安装座5外周上的安装支架11,及设置在所述安装支架11上用于检测是否存在工具的传感器12。安装支架11的个数与工具安装单元的个数相同,其是通过螺栓固定在电机安装座5的圆周上且与工具安装单元均为均布排布,而传感器12则是通过螺栓固定在安装支架11上,其作用为感应在对应的固定板9上是否有末端执行器14,并通过信号线向控制系统输出信号。
21.所述动力单元包括设置在所述电机安装座5上且贯穿所述安装支撑板1的减速机4,设置在所述减速机4底部用于提供动力的步进电机3,设置在所述减速机4旋转轴上的联轴器6,及设置在所述联轴器6上法兰轴7。减速机4通过螺栓安装在电机安装座5上,底端安装步进电机3,顶部安装联轴器6,其作用是降低步进电机3的转速,提升输出扭矩,将动力通
过联轴器6传递给法兰轴7,步进电机3用于为这个智能工具库提供动力,使的工具安装座8做圆周旋转运动,法兰轴7的作用为将减速机4的输出动力传递给工具安装座8,带动工具安装座8做旋转运动,联轴器6的作用为将减速机4的输出动力传递给法兰轴7。
22.所述工具安装单元包括设置在所述工具安装座8上且前端呈u型结构的固定板9,设置在所述固定板9上且置于u型结构两侧的定位销13,及设置在所述固定板9上且置于u型机构内且通过所述定位销13定位的末端执行器14。根据需求设置不同个数的固定板9,并通过螺栓将其均布固定在工具安装座8上,并在其上设置两个定位销13,以实现对末端执行器14的定位,而固定板9的主要作用即是放置和定位末端执行器14,每个固定板9上安装有两个定位销13,其作用为定位固定板9上的末端执行器14位置,两个定位销13工作时分别与末端执行器14的圆柱面定位b面和定位c面对准定位,末端执行器14放置在固定板9开口面上,通过其上的平面定位a面、圆柱面定位b面和定位c面实现精确定位,便于工业机器人在工具抓取和放置位能够精确完成放置和抓取末端执行器14的动作。
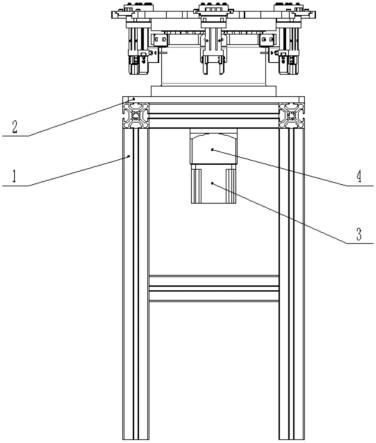
23.所述智能工具库还包括用于安装所述安装支撑板1的安装底座1。安装底座1的作用为支撑整个智能工具库,并且可以根据不同需求进行不同高度设置安装底座1的高度,以能满足使用要求为宜。
24.所述智能工具库还包括设置在所述电机安装座5与所述工具安装座8之间用于起到相对旋转运动的推力轴承10。将推力轴承10安装在电机安装座5和工具安装座8之间,实现电机安装座5和工具安装座8之间相对旋转运动,并且通过推力轴承10可以进一步的承重智能工具库旋转部分,以减少法兰轴7的承载。
25.在工作时,工业机器人需要抓取并安装在智能工具库上的末端执行器14时,控制系统向步进电机3发送运动指令,驱动步进电机3做旋转运动,减速机4在步进电机3的带动下做减速运动,进一步放大扭矩,并通过联轴器6将动力传递给法兰轴7,工具安装座8在推力轴承10的支撑下随法兰轴7一起旋转运动,安装在工具安装座8上的固定板9绕着法兰轴7的轴向做旋转运动,由于固定板9的旋转,使得安装在固定板9上的末端执行器14也随之旋转,当工业机器人所需的末端执行器14旋转到智能工具库更换工具位时,传感器12向控制系统发送到位信号,控制系统收到信号后控制步进电机3停止旋转,智能工具库随之停转并保持不动,工业机器人动作并通过末端执行器14上的快换机构实现抓取末端执行器14,抓取后即可携带末端执行器14投入生产中完成相应工作。
26.此种智能工具库可以安装若干个工具安装单元,并且可以同时放置若干个不同功能的末端执行器,另外该智能工具库结构设计巧妙,能够实现末端执行器精确定位放置,可以在plc等控制单元控制下实现自动化智能化,放置和抓取末端执行器,再者在该智能工具库中末端执行器放置集中,节约空间,能够快速自动化更换工业机器人末端执行器,大大提升工业机器人工作站的工作效率。
27.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。