技术特征:
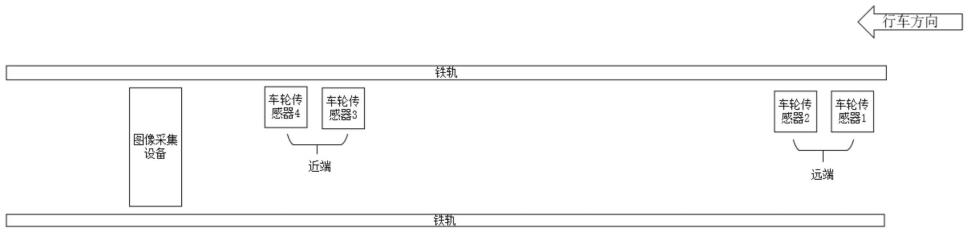
1.一种车轮模拟器远近端自动识别方法,其特征在于,包括以下步骤:当现场不需要检查图像采集设备的拍摄角度时滚轮不工作,遥控器选择非滚轮模式,若现场需要检查图像采集设备的拍摄角度时滚轮需要工作,遥控器选择滚轮模式;1)当遥控器在非滚轮模式工作时,保持遥控器在以图像采集设备为中心的区域范围内,所述的区域范围的半径小于等于区域半径阈值r;首先获取遥控器、近端车轮模拟器和远端车轮模拟器的定位装置的位置信息,然后计算出近端车轮模拟器到遥控器的距离和远端车轮模拟器到遥控器的距离,根据近端车轮模拟器到遥控器的距离小于远端车轮模拟器到遥控器的距离来判断出远端和近端;近端车轮模拟器和远端车轮模拟器分别为设置在近端车轮传感器远端车轮传感器上的车轮模拟器;2)当遥控器在滚轮模式工作时,首先获取滚轮、近端车轮模拟器和远端车轮模拟器的定位装置的位置信息,然后计算出近端车轮模拟器到滚轮的距离和远端车轮模拟器到滚轮的距离,根据近端车轮模拟器到滚轮的距离小于远端车轮模拟器到滚轮的距离来自动判断出近端和远端。2.根据权利要求1所述的一种车轮模拟器远近端自动识别方法,其特征在于,当遥控器在非滚轮模式工作时,在不操作车轮模拟器工作的情况下,当检测到近端车轮模拟器或者远端车轮模拟器到遥控器的距离大于(r l d),l为远端车轮模拟器到图像采集设备的距离,d为设定的脱离距离,遥控器和两个车轮模拟器都会提示遗落。3.根据权利要求2所述的一种车轮模拟器远近端自动识别方法,其特征在于,当遥控器在滚轮模式工作时,在不操作车轮模拟器工作的情况下,当检测到近端车轮模拟器或者远端车轮模拟器到滚轮的距离大于(r l d),或者滚轮到遥控器的距离大于(r l d),遥控器、滚轮和两个车轮模拟器都会提示遗落。4.根据权利要求2或3所述的一种车轮模拟器远近端自动识别方法,其特征在于,所述区域半径阈值r为30米。5.根据权利要求4所述的一种车轮模拟器远近端自动识别方法,其特征在于,所述远端车轮模拟器到图像采集设备的距离l为80米。6.根据权利要求5所述的一种车轮模拟器远近端自动识别方法,其特征在于,所述脱离距离d为10米。7.一种车轮模拟器远近端自动识别系统,其特征在于,所述系统包括硬件子系统和软件子系统;所述硬件子系统包括:遥控器、近端车轮模拟器和远端车轮模拟器;所述近端车轮模拟器和远端车轮模拟器分别为设置在近端车轮传感器远端车轮传感器上的车轮模拟器;所述遥控器用于选择滚轮模式和滚轮模式;所述软件子系统包括远近端识别单元,所述远近端识别单元根据滚轮、遥控器、近端车轮模拟器和远端车轮模拟器的位置信息进行车轮模拟器远近端的识别,具体识别过程包括以下步骤:1)当遥控器在非滚轮模式工作时,保持遥控器在以图像采集设备为中心的区域范围内,所述的区域范围的半径小于等于区域半径阈值r;首先获取遥控器、近端车轮模拟器和远端车轮模拟器的定位装置的位置信息,然后计算出近端车轮模拟器到遥控器的距离和远
端车轮模拟器到遥控器的距离,根据近端车轮模拟器到遥控器的距离小于远端车轮模拟器到遥控器的距离来判断出远端和近端;近端车轮模拟器和远端车轮模拟器分别为设置在近端车轮传感器远端车轮传感器上的车轮模拟器;2)当遥控器在滚轮模式工作时,首先获取滚轮、近端车轮模拟器和远端车轮模拟器的定位装置的位置信息,然后计算出近端车轮模拟器到滚轮的距离和远端车轮模拟器到滚轮的距离,根据近端车轮模拟器到滚轮的距离小于远端车轮模拟器到滚轮的距离来自动判断出近端和远端。8.根据权利要求7所述的一种车轮模拟器远近端自动识别系统,其特征在于,所述软件子系统还包括防遗落报警单元,所述防遗落报警单元根据滚轮、遥控器、近端车轮模拟器和远端车轮模拟器的位置信息进行防遗落检测,具体过程包括以下步骤:当遥控器在非滚轮模式工作时,在不操作车轮模拟器工作的情况下,当检测到近端车轮模拟器或者远端车轮模拟器到遥控器的距离大于(r l d),l为远端车轮模拟器到图像采集设备的距离,d为设定的脱离距离,遥控器和两个车轮模拟器都会提示遗落;当遥控器在滚轮模式工作时,在不操作车轮模拟器工作的情况下,当检测到近端车轮模拟器或者远端车轮模拟器到滚轮的距离大于(r l d),或者滚轮到遥控器的距离大于(r l d),遥控器、滚轮和两个车轮模拟器都会提示遗落。9.根据权利要求8所述的一种车轮模拟器远近端自动识别系统,其特征在于,所述区域半径阈值r为30米;所述远端车轮模拟器到图像采集设备的距离l为80米。10.根据权利要求9所述的一种车轮模拟器远近端自动识别系统,其特征在于,所述脱离距离d为10米。
技术总结
一种车轮模拟器远近端自动识别方法及系统,属于列车安检设备调试、检修技术领域。本发明为了解决目前人工对车轮模拟器区分时存在工作量大的问题以及对车轮模拟器进行区别存在的成本高的问题。本发明的识别方法中,当遥控器在非滚轮模式工作时,计算出近端车轮模拟器到遥控器的距离和远端车轮模拟器到遥控器的距离,根据近端车轮模拟器到遥控器的距离小于远端车轮模拟器到遥控器的距离来判断出远端和近端;当遥控器在滚轮模式工作时,计算出近端车轮模拟器到滚轮的距离和远端车轮模拟器到滚轮的距离,根据近端车轮模拟器到滚轮的距离小于远端车轮模拟器到滚轮的距离来自动判断出近端和远端。本发明用于车轮模拟器远近端自动识别。端自动识别。端自动识别。
技术研发人员:董春光 王健 祝恩斌
受保护的技术使用者:哈尔滨市科佳通用机电股份有限公司
技术研发日:2022.10.25
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。