针引导装置及包含其的机器臂
1.本技术是申请号为201910993267.8的中国发明专利(发明名称为“针引导装置及包含其的机器臂”,申请日为2019年10月18日;优先权文件fr1903636,优先权日为2019年4月4日)的分案申请。
技术领域
2.本发明涉及医疗设备,并且涉及安装在医疗辅助机器臂的末端的医疗设备领域。本发明更具体地涉及一种用于固定到机械臂的工具架上的医疗针引导装置。
背景技术:
3.使用被称为“微创手术(minimally invasive surgery)”的手术技术的手术治疗使得操作者(通常是外科医生)能够通过将长而薄的器械插入到短长度的切口中来到达患者的目标解剖区域,例如在患者体内产生的一厘米的量级(order)。
4.在一些操作的背景下,那些器械可以是一个或多个针或刚性圆柱形器械(例如天线,电极,套管),其意图被插入患者体内至一定深度以到达目标解剖区域。
5.如果针完全由操作者手动插入,则治疗的结果很大程度上取决于他们的技能。难以实现高精度,并且由于缺乏准确性而导致医疗错误的风险很高,这可能伤害患者。
6.由于使用由操作员远程控制的机器臂,可以提高操作的准确性。这种类型的机械臂仍然部分地取决于操作者的技能,并且可能需要患者的连续成像,这迫使患者经受一定剂量的辐射。
7.为了进一步提高插入手势的准确性并限制患者和医务人员所经受的辐射剂量,可以使用自动控制的机械臂。
8.机器臂在其端部具有用于引导针的装置。
9.操作者向机器人臂传达要到达的患者的目标解剖区域的坐标,并且控制臂从而将针引导装置移动到目标解剖区域的前面。然后,操作者将针插入引导装置中,从而到达目标解剖区域。为了使针准确地到达该区域,必须控制针的平移轴位置在引导装置内。因此,必须掌握引导装置的所有移动,因此掌握臂的移动。
10.当治疗需要将针顺序插入目标解剖区域时,控制移动就更为重要。在这种情况下,针引导装置在每个针的插入期间必须是固定的,从而一旦针已经插入目标解剖区而不移动针,就保持并释放所述针的平移轴的位置。实际上,一旦将针插入目标解剖区域中,针的任何不受控制的移动都易于伤害患者。
11.因此,一方面需要引导至少一个针沿着位置被保持的平移轴插入,直到针到达目标解剖区域,并且另一方面当针被插入目标解剖区域,没有移动所述针的风险时,释放针引导装置。
12.此外,还需要知道插入患者体内的针的长度。
13.最后,需要在相同的医疗治疗期间或在单独的医疗治疗期间用相同的引导装置引导至少两个不同直径的针的插入;每个针必须沿着相同的平移轴被引导,其位置被保持,直
到它到达目标解剖区域并且还必须能够在其插入目标解剖区域没有被移动的风险时从引导装置脱离。
14.发明概述
15.本发明的目的是解决上述需求,并且为此本发明涉及一种针引导装置,包括意图固定到医疗辅助机器臂的端部的工具架。所述工具架支撑针引导件。针引导件包括各自具有凹槽的第一钳口和第二钳口,所述两个凹槽沿平行的纵轴延伸。所述第一钳口和所述第二钳口由工具架支撑,从而允许所述第一钳口和所述第二钳口相对于彼此在以下两者之间旋转的移动性:称为“引导位置”的位置,其中凹槽相邻并且限定用于引导针的引导管,和称为”脱离位置“的位置,其中凹槽远离彼此移动并且限定针侧向脱离区。
16.当引导装置占据引导位置时,针可以通过引导管引导平移移动直到其到达患者的目标解剖区域。
17.配置引导管被从而针在平移时仅允许一个移动自由度。
18.当钳口处于脱离位置时,通过沿远离脱离区域的方向平移移动,引导装置可侧向自由脱离已到达目标解剖区域的针。例如,如果仅需要把一个针引入目标解剖区域,则该侧向脱离发生例如在医疗操作的最后,或如果必须把另外的针头引入目标解剖区域中,则该侧向脱离会发生在医疗操作期间。
19.应该注意的是,由于滥用语言,本文指出引导和脱离位置被针引导件和钳口占据。
20.由于本发明的特征,针可以从针引导件脱离而不接触,使得针保持固定在目标解剖区域中的位置。
21.因此防止了可伤害患者的针的不想要的移动。
22.由于这些特征,引导装置使得能够使用相同的引导装置在相同医疗操作期间,连续插入多个相同直径的针的以到达目标解剖区域。
23.在特定实施方案中,本发明还具有以下特征,其单独地或以它们技术上可行的组合中的每一个为特征。
24.在本发明的特定实施方案中,第一钳口或第二钳口包括通过拉动来操控其的操控手柄,所述拉动关于驱动所述第一钳口或所述第二钳口相对于另一个钳口的移动。
25.在本发明的特定实施方案中,工具架包括在两个端部开口之间纵向延伸的壳体,并且其中接合所述针引导件,所述工具架包括轴向通孔,其从所述一个端部开口沿着与壳体的纵轴平行的轴线向另一个端部开口延伸,当所述第一钳口和所述第二钳口处于脱离位置时,所述轴向通孔面对侧向脱离区。
26.因此,一旦针被引导直到其到达目标解剖区域,它就可以从引导装置脱离而不接触,从而保持固定在目标解剖区域中的位置。
27.在本发明的特定实施方案中,第一和第二钳口分别由固定钳口和移动钳口形成。
28.在本发明的特定实施方案中,固定钳口接合在壳体中,所述固定钳口和所述壳体在它们各自的面对表面上具有嵌套元件,所述嵌套元件彼此配合以固定所述固定钳口以防止相对于所述工具架的旋转。
29.嵌套元件能够彼此直接配合;例如,如果嵌套元件分别由榫沟和榫形成,则情况就是这样。或者,这些元件可以彼此间接地配合;例如,如果嵌套元件由插入楔或销的榫沟形成,则情况就是这样。
30.在把针引导件插入壳体期间,嵌套元件有利地具有poka轭功能。
31.在本发明的特定实施方案中,嵌套元件由分别的互补形状起伏(relief)形成,包括:
[0032]-在所述固定钳口的称为“外表面”的表面纵向延伸的起伏,以及
[0033]-在所述壳体的称为“内壁”的表面纵向延伸的起伏。
[0034]
这些起伏可以由榫和榫沟形成。
[0035]
由于嵌套元件,固定钳口以简单且可靠的方式固定。
[0036]
在本发明的特定实施方案中,第一和第二钳口可拆卸地彼此固定。它们优选地可拆卸地接合在工具架的壳体中。
[0037]
这种特征尤其旨在增强引导装置的消毒功效,所述装置的每个部件可单独消毒。
[0038]
在本发明的特定实施方案中,固定钳口与工具架一体形成;因此,固定钳口和工具架形成一体式部件。
[0039]
在本发明的特定实施方案中,工具架包括相对于所述壳体径向延伸的贯穿开口,第一和第二钳口包括用于操控其的手柄,所述操控手柄通过所述贯穿开口延伸,并且当通过其拉动时,驱动所述第一或第二钳口在壳体中移动,所述贯穿开口形成引导所述操控手柄的路径。
[0040]
在本发明的特定实施方案中,开口包括相对于所述壳体轴向延伸的部分,所述部分开口在所述工具架的称为“上表面”的表面上,并与所述壳体的其中一个端部开口齐平。
[0041]
因此,钳口中的一个(其中应用两个钳口的情况取决于本发明的特定实施方案)可以从工具架分离,从而单独地对引导装置的每个部件进行消毒,由此增强引导装置的消毒功效。
[0042]
由于该特征,引导装置的部件也可以单独更换。
[0043]
在本发明的特定实施方案中,第一和第二钳口包括各自的轴向肩部,所述轴向肩部具有互补的轮廓,所述轴向肩部通过所述轮廓相互配合。
[0044]
第一和第二钳口通过其轴向肩部彼此紧靠,所述肩部至少部分地彼此交错。
[0045]
该特征有利地有利于引导第二钳口在壳体中的旋转。
[0046]
轴向肩部可有利地构成用于第二钳口的角移动的桥台(abutment)。
[0047]
在本发明的特定实施方案中,第一钳口和第二钳口通过杆可拆卸地连接,所述杆从所述第一钳口和所述第二钳口两者中的一个纵向延伸,穿过在另一个钳口的轴向肩部形成的轴向壳体。钳口通过机械连接相互连接,仅允许一个旋转自由度。
[0048]
由于杆,钳口的旋转轴线是同轴的。
[0049]
除了参与增强第一和第二钳口的消毒功效之外,该特征使得能够快速固定和拆卸所述钳口。
[0050]
在本发明的特定实施方案中,引导装置包括光学导航系统,所述光学导航系统包括机械地连接第一钳口和第二钳口的参考光学元件,以及确定每个参考光学元件的位置的读取模块,所述导航系统意图连接到控制单元,该控制单元被配置为基于与由所述光学导航系统发送的光学元件的位置有关的信息确定所述第一钳口的和所述第二钳口的位置。
[0051]
由于这些特征,可以自动确定钳口在工具架内的位置。
[0052]
在本发明的特定实施方案中,引导装置包括传感器,所述传感器封装在凹槽中配
置为当第一钳口和第二钳口处于引导位置时,确定针穿过所述引导管的行程长度。
[0053]
传感器可以有利地连接到控制单元,该控制单元被配置成基于与插入到引导管的针的行程长度有关的信息,以及基于相对于针引导件的位置患者的目标解剖区域的位置,确定所述针相对于患者的所述目标解剖区域的位置。
[0054]
并且,在本发明的范围内的是与上文或下文中提及的一些或所有特征结合的一种针引导装置,其中该针引导件包括连接到钳口并同步钳口相对于彼此的角移动的移动传动构件。
[0055]
由于该特征,两个钳口彼此成角度地对称移动。
[0056]
换句话说,在一个钳口的旋转期间,传动构件以相同的角移动驱动另一个钳口的旋转。
[0057]
因此,可以通过凹槽抓住针而不改变其纵轴的位置,这使得例如在更换针时防止定位针的错误成为可能。
[0058]
此外,该特征使得能够使用不同直径的针。
[0059]
在本发明的特定实施方案中,引导装置包括弹性构件,该弹性构件紧靠至少一个钳口设置,从而推进第一和第二钳口朝向其引导位置旋转。
[0060]
该特征的有利之处在于,其使得防止针引导件在脱离位置中的任何移动并因此防止针的任何意外移动成为可能。
[0061]
此外,该特征使得能够在引导位置系统地驱动钳口,因此消除了操作者手动执行该操作的需要。
[0062]
在本发明的特定实施方案中,每个钳口包括在凹槽水平处的至少一个齿,所述至少一个齿适于在针引导件处于引导位置时相互穿插。
[0063]
每个钳口更具体地包括至少一个齿,所述齿面对面地布置。凹槽在钳口的各自齿中横向地形成。
[0064]
该特征使得能够沿着所述针分配通过钳口特别是通过齿施加到针上的夹紧力,并且因此在针接合在引导管中时参与确保针的稳定性。
[0065]
在本发明的特定实施方案中,凹槽具有v形横截面。
[0066]
因此,对于给定的工具架位置,针在两个钳口之间的引导管中以完全相同的方式被夹持,无论其直径如何,所述针的纵轴的位置不依赖于其直径。因此,可以在操作期间改变针并且在针的平移中保持相同的移动轴,无论其直径如何。
[0067]
在本发明的特定实施方案中,针引导装置包括用于把针引导件锁定在引导位置的机构。锁定机构配置为用于当第二钳口枢转超过预定角度位置时,固定第一钳口或第二钳口以防止旋转。
[0068]
该特征有利地使得能够通过钳口保持针,并且更具体地防止针的所有角相对移动,同时允许沿着其纵轴平移移动。
[0069]
因此,针的任何意外的横向拉动都不能导致易于使针从引导管脱离并最终损伤患者的针的移动。
[0070]
在本发明的特定实施方案中,锁定机构包括:
[0071]-枢轴连接,其使所述操控手柄连接到所述第一钳口或连接到所述第二钳口,并允许所述手柄相对于所述钳口在两个极端角度位置之间旋转一个自由度,
[0072]-唇部,其从操控手柄朝向工具架延伸,以及
[0073]-弹性构件,其拉动所述手柄朝向一个极端角度位置旋转,使得当所述第一钳口和所述第二钳口处于引导位置时,所述唇部紧靠所述工具架的接触表面支撑。
[0074]
换句话说,弹性构件拉动操控手柄,从而生成使唇部紧靠工具架的接触表面支撑的现象。
[0075]
该特征使得能够通过简单的机械手段将针引导件固定在引导位置。
[0076]
另一个优点在于针引导件的快速解锁以允许其移动到脱离位置。
[0077]
实际上,仅需要施加与由弹性构件拉动操控手柄相反的力来减少和/或消除引起支撑现象的摩擦。
[0078]
根据另一方面,本发明还涉及一种机器臂,其一端包括如上所述的针引导装置。
[0079]
机器臂包括意图从所述针引导装置的光学导航系统接收与所述第一钳口或所述第二钳口的位置相关信息的控制单元,所述控制单元被配置成确定所述钳口的位置并根据所确定的所述钳口的位置命令机械臂配置在给定位置。
[0080]
在本发明的特定实施方案中,配置控制单元,从而:
[0081]-当确定所述第一钳口和所述第二钳口处于引导位置时,它阻止机械臂的所有移动,并且
[0082]-当确定第一钳口和第二钳口处于脱离位置时,它允许机械臂的移动。
[0083]
因此,不可能改变引导装置的位置并因此改变插入引导管中的针的平移移动轴的位置。
[0084]
此外,该特征还能够在医疗操作期间保持引导管的位置,从而保证针插入患者的目标解剖区域的准确性。
[0085]
此外,该特征使得防止可由携带针插入针引导件的机械臂的意外移动引起的伤害成为可能。
[0086]
当第一和第二钳口处于脱离位置时,允许机器人臂移动,使得它可以相对于患者的目标解剖区域侧向移动,以使针与引导装置不具有任何接触的情况下从针引导件脱离。针在其脱离期间保持不动。
[0087]
具体地,本技术还提供了以下实施方案:
[0088]
实施方案1.一种针引导装置(20),包括意图固定到医疗辅助机器臂(10)的端部的工具架(21),所述工具架(21)支撑针引导件(22),
[0089]
所述引导装置(20)的特征在于,所述针引导件(22)包括各自具有凹槽(35,45)的第一钳口(30)和第二钳口(40),所述两个凹槽沿平行的纵轴延伸,所述第一钳口(30)和所述第二钳口(40)由工具架支撑,从而允许所述第一钳口(30)和所述第二钳口(40)相对于彼此在以下两者之间旋转的移动性:称为“引导位置”的位置,其中凹槽(35,45)相邻并且限定用于引导针的引导管(23),和称为“脱离位置”的位置,其中所述凹槽(35,45)远离彼此移动并且限定针侧向脱离区。
[0090]
实施方案2.根据实施方案1所述的针引导装置(20),其中所述第一钳口(30)或所述第二钳口(40)包括通过拉动来操控其的手柄(49),所述拉动关于驱动所述第一钳口(30)或所述第二钳口(40)相对于另一个钳口(30;40)移动。
[0091]
实施方案3.根据实施方案1或2任一项所述的针引导装置(20),其中所述工具架
(21)包括在两个端部开口之间纵向延伸的壳体(210),其中接合所述针引导件(22),所述工具架(21)包括轴向通孔(214),其从所述一个端部开口沿着与所述壳体(210)的纵轴平行的轴线向另一个端部开口延伸,当所述第一钳口(30)和所述第二钳口(40)处于脱离位置时,所述轴向通孔(214)面对侧向脱离区。
[0092]
实施方案4.根据实施方案1至3任一项所述的针引导装置(20),其中所述第一钳口(30)和所述第二钳口(40)分别由固定钳口(30)和活动钳口(40)形成。
[0093]
实施方案5.根据实施方案3或4所述的针引导装置(20),其中固定钳口(30)接合在所述壳体(210)中,所述固定钳口(30)和所述壳体(210)在它们各自的面对表面上具有嵌套元件(50),所述嵌套元件(50)彼此配合以固定所述固定钳口(30)以防止相对于所述工具架(21)的旋转。
[0094]
实施方案6.根据实施方案5所述的针引导装置(20),其中所述嵌套元件(50)由分别的互补形状起伏形成,所述起伏包括:
[0095]-在所述固定钳口(30)的称为“外表面”的表面纵向延伸的起伏,以及
[0096]-在所述壳体(210)的称为“内壁”的表面纵向延伸的起伏。
[0097]
实施方案7.根据实施方案1至6任一项所述的针引导装置(20),其中所述第一钳口(30)和所述第二钳口(40)可拆卸地彼此固定,并且可拆卸地接合在所述工具架(21)的所述壳体(210)中。
[0098]
实施方案8.根据实施方案4所述的针引导装置(20),其中所述固定钳口(30)与所述工具架(21)一体的形成。
[0099]
实施方案9.根据实施方案2或3所述的针引导装置(20),其中所述工具架(21)包括相对于所述壳体(210)径向延伸的贯穿开口(24),所述操控手柄(49)通过所述贯穿开口(24)延伸,所述贯穿开口(24)形成引导所述操控手柄(49)的路径。
[0100]
实施方案10.根据实施方案9所述的针引导装置(20),其中所述开口(24)包括相对于所述壳体(210)轴向延伸的部分,所述部分开口在所述工具架(21)的称为“上表面”的表面上,并与所述壳体(210)的一个端部开口齐平。
[0101]
实施方案11.根据实施方案1至10任一项所述的针引导装置(20),其中所述第一钳口(30)和所述第二钳口(40)包括各自的轴向肩部(36,46),所述轴向肩部(36,46)具有互补的轮廓,所述轴向肩部(36,46)通过所述轮廓相互配合。
[0102]
实施方案12.根据实施方案11所述的针引导装置(20),其中所述第一钳口(30)和所述第二钳口(40)通过杆(60)可拆卸地连接,所述杆(60)从所述第一钳口(30)和所述第二钳口(40)两者中的一个纵向延伸,穿过在另一个钳口(30;40)的轴向肩部(46)形成的轴向壳体(47)。
[0103]
实施方案13.根据实施方案7所述的针引导装置(20),其包括传感器,所述传感器封装在所述凹槽(35,45)中,配置为当所述第一钳口(30)和所述第二钳口(40)处于引导位置时,确定针穿过所述引导管(23)的行程长度。
[0104]
实施方案14.根据实施方案1或2所述的针引导装置(20),其中所述针引导件(22)包括移动传动构件(70),所述移动传动构件(70)连接到所述第一钳口(30)和所述第二钳口(40)并同步所述第一钳口(30)和所述第二钳口(40)相对于彼此的角移动。
[0105]
实施方案15.根据实施方案14所述的针引导装置(20),包括弹性构件(71),所述弹
性构件(71)紧靠至少一个所述钳口(30,40)布置,从而推进所述第一钳口(30)和所述第二钳口(40)朝着他们的引导位置旋转。
[0106]
实施方案16.根据实施方案1,2,14或15中任一项所述的针引导装置(20),其中每个所述第一钳口(30)和每个所述第二钳口(40)在所述凹槽(35,45)的水平面处包括至少一个齿(37,57),所述至少一个齿(37,57)在当所述针引导件(22)处于引导位置时适于相互穿插。
[0107]
实施方案17.根据实施方案16所述的针引导装置(20),其中所述凹槽(35,45)具有v形横截面。
[0108]
实施方案18.根据实施方案1,2或14-17中任一项所述的针引导装置(20),包括用于在所述引导位置锁定所述针引导件(22)的机构(80),所述锁定机构(80)被配置为用于当所述第二钳口(40)枢转超过预定角度位置时,固定所述第一钳口(30)或所述第二钳口(40)以防止旋转。
[0109]
实施方案19.根据实施方案2至18所述的针引导装置(20),其中,所述锁定机构(80)包括:
[0110]-枢轴连接,其使所述操控手柄(49)连接到所述第一钳口(30)或连接到所述第二钳口(40),并允许所述手柄相对于所述钳口在两个极端角度位置之间旋转一个自由度,
[0111]-唇部(81),其从所述操控手柄(49)朝向所述工具架(21)延伸,
[0112]-以及弹性构件(82),其拉动所述手柄朝向一个极端角度位置旋转,使得当所述第一钳口(30)和所述第二钳口(40)处于引导位置时,所述唇部(81)紧靠所述工具架(21)的接触表面(215)支撑。
[0113]
实施方案20.根据实施方案1至19中任一项所述的针引导装置(20),其包括光学导航系统,所述光学导航系统包括机械地表示为所述第一钳口(30)和所述第二钳口(40)的每个的参考光学元件,以及确定每个参考光学元件的位置的读取模块,所述导航系统意图连接到控制单元,所述控制单元被配置为基于与由所述光学导航系统发送的光学元件的位置有关的信息确定所述第一钳口(30)的和所述第二钳口(40)的位置。
[0114]
实施方案21.在一端包含实施方案1至20中任一项所述的针引导装置(20)的机器臂(10),所述机器臂(10)的特征在于,其包括意图从所述针引导装置(20)的光学导航系统接收与所述第一钳口(30)或所述第二钳口(40)的位置相关的信息的控制单元,所述控制单元被配置成确定所述钳口(30;40)的位置并根据所确定的所述钳口(30;40)的位置命令配置机械臂(10)在给定位置。
[0115]
实施方案22.根据实施方案21所述的机械臂(10),其中,配置所述控制单元被,从而:
[0116]-当确定所述第一钳口(30)和所述第二钳口(40)处于引导位置时,它阻止机械臂(10)的所有移动,并且
[0117]-当确定第一钳口(30)和第二钳口(40)处于脱离位置时,它允许机械臂(10)的移动。
附图说明
[0118]
通过阅读以下通过非限制性示例给出的描述并参考以下附图,会更好地理解本发
明:
[0119]
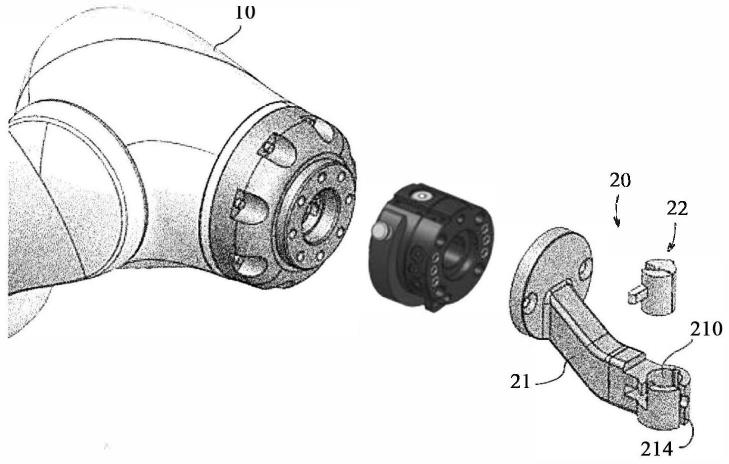
图1表示机器人臂,根据第一实施例的针引导装置,以及提供机器臂的自由端和引导装置之间的接口的工具变换器的分解透视图;
[0120]
图2表示图1的引导装置的俯视透视图,该引导装置包括仅示出一部分的工具架和示出处于用于引导针的位置的针引导件;
[0121]
图3表示图2的引导装置的仰视透视图;
[0122]
图4表示图2的引导装置的针引导件的俯视透视图;
[0123]
图5表示图2的针引导件的活动钳口的俯视透视图;
[0124]
图6表示图2的针引导件的固定钳口的仰视透视图;
[0125]
图7表示针引导装置的第二实施例的透视图;
[0126]
图8表示图7的针引导装置的剖视图;
[0127]
图9表示图7的装置的横截面的透视图。
[0128]
在这些图中,从一个图到另一个图相同的附图标记表示相同或类似的元件。此外,为清楚起见,除非另有说明,否则附图未按比例绘制。
[0129]
发明详述
[0130]
图1示出了机器臂10,其包括在其自由端的根据第一实施例的针引导装置20,该针引导装置20意图在医疗操作期间帮助操作者将针引入患者体内,直到其插入目标解剖区。机械臂10优选地包括在其自由端处的工具更换器,其提供所述自由端和引导装置20之间的接触面。
[0131]
如图2和图3所示,引导装置20包括意图固定到机器臂10的工具架21和与所述工具架21配合的针引导件22。
[0132]
工具架21包括在两个端部开口之间纵向延伸的壳体210,所述端部开口分别开在工具架21的称为“上表面”的表面211和称为“下表面”的表面212。壳体210由内壁213限定在两个端部开口之间。
[0133]
在图1至3所示的优选实施例中,内壁213具有圆形横截面。
[0134]
针引导件22接合在壳体210中,并且在本发明的优选实施例中包括两个钳口30,40,它们以在“引导位置”之间自由旋转的方式彼此固定,其中所述钳口30,40限定用于引导针的引导管23和“脱离”位置,其中它们限定针侧向脱离区。
[0135]
钳口在下文中通常称为“第一钳口”30和“第二钳口”40。
[0136]
如图1至图3所示,工具架21包括轴向通孔214,其从壳体210的端部开口的一个沿着与壳体210的纵轴平行的轴线向壳体210的端部开口的另一个延伸。钳口30和第二钳口40有利地设置在壳体210中,使得当它们处于脱离位置时,侧向脱离区域面对轴向通孔214。
[0137]
因此,当第一钳口30和第二钳口40处于引导位置时,针插入引导管23中,从而将其引入患者的目标解剖区域中,因此当第一钳口30和第二钳口40经由侧向脱离区域和轴向通孔214占据脱离位置时,可以通过所述引导装置20的移动的优点将针从引导装置20侧向抽出。
[0138]
在第一实施例中,当针引导件22接合在壳体210中时,第一钳口30(称为“固定钳口”30)优选地相对于工具架21固定,称为“活动钳口”40的第二钳口40优选地相对于所述固定钳口30围绕平行于壳体210的纵轴的旋转轴自由旋转。
[0139]
如图4至图6所示,固定钳口30和活动钳口40更特别地沿着与壳体210的纵轴平行的纵轴,在分别称为“上端”31,41和“下端”32,42的两个端部之间延伸。所述固定钳口30和所述活动钳口40通过一外表面分别在其上端31和41,与下端32和42之间限定,所述外表面的一部分在下文中称为“外弧面”33,43,其连接到与其相对的在下文中称为“内弧面”34,44的一部分。
[0140]
应当注意,在本文中,定义相对术语“上”和“下”为使得所谓的“上”元件位于所谓的“下”元件上方,所述相对术语与机械臂10和引导装置20在图1至3中表示的位置有关。
[0141]
固定钳口30和活动钳口40的外弧面33,43各自具有圆形的横截面,并且当针引导件22连接在工具架中时,面对壳体210的内壁213。
[0142]
如图4所示,在本发明的优选实施例中,固定钳口30和活动钳口40的外弧面33,43内接在具有圆形横截面的柱体中。当所述固定钳口30和所述活动钳口40接合在壳体210中时,外弧面33,43和壳体210的内壁213是同心的。
[0143]
为了接合在壳体210中,调整固定钳口30和活动钳口40的尺寸使得所述壳体210外弧面33,43的横截面的半径小于内壁横截面的半径。
[0144]
当针引导件22接合在工具架21中时,固定钳口30和活动钳口40的内弧面34,44彼此面对地布置,并且调整其尺寸从而形成用于在所述固定钳口30和所述活动钳口40之间角度相对移动的空间。
[0145]
每个固定钳口30和活动钳口40包括在其内弧面34,44上的凹槽35,45,凹槽35,45沿着纵轴从其下端32,42延伸到其上端31,41。槽35,45具有各自尺寸相同的圆形横截面。或者,凹槽35,45可以具有多边形的横截面。
[0146]
凹槽35,45使得当固定钳口30和活动钳口40处于引导位置时,所述凹槽35,45在其整个长度上相邻并且形成针的引导管23,从而当钳口占据脱离位置时,所述凹槽35,45移动分开并在它们之间限定针侧向脱离区。
[0147]
凹槽35,45优选地布置在固定钳口30和移动钳口40各自的内弧面34,44的一部分上,该内弧面容纳在包含外弧面33,43的直径的平面中。
[0148]
在本发明的优选实施例中,固定钳口30和壳体210在其各自面对的表面,也就是说固定钳口30的外弧表面33和壳体210的内壁213,嵌套元件50彼此配合以固定所述固定钳口30以防止其相对于工具架21旋转。
[0149]
嵌套元件50可以有利地允许工具架21和固定钳口30之间的平移移动的一个自由度,使得引导件22可以可拆卸地接合在工具架21的壳体210中,如同在下文中更详细地描述。
[0150]
嵌套元件50优选地由具有互补形状的起伏形成,所述起伏分别平行于固定钳口30的纵轴和壳体210的纵轴延伸。例如,这些起伏分别采用榫部和榫沟的形式,如2所示,在优选实施例中,榫位于固定钳口30的外弧面33上,榫沟位于壳体210的内壁213中。或者,榫位于壳体210的内壁213上,并且榫沟位于固定钳口30的外弧面33上。
[0151]
因此,固定钳口30以简单且可靠的方式固定。
[0152]
如图3所示,嵌套元件50可以替代地采取纵向彼此面对布置的榫沟的形式,所述榫沟分别在固定钳口30的外弧面33上和壳体210的内壁213上,其中意图接合楔或销。
[0153]
嵌套元件50具有在将针引导件22插入壳体210期间具有poka轭功能的优点。
[0154]
如图5和图6所示,固定钳口30自身和移动钳口40自身视图显示,所述固定钳口30和所述活动钳口40各自在其内弧面34,44上具有轴向肩部36,46,所述钳口通过所述肩部彼此配合。
[0155]
固定钳口30和活动钳口40的轴向肩部36,46从支承表面360,460远离彼此延伸,并且直至表面与所述固定钳口30和所述活动钳口40的上端31,41和下端32,42中的一个或另一个齐平,支承表面360,460位于与所述钳口的纵轴基本垂直的平面中,
[0156]
更确切地说,如图4和6所示,固定钳口30的轴向肩部36延伸至与其上端31齐平的表面,并且活动钳口40的轴向肩部46延伸至与其下端42齐平的表面。换句话说,固定钳口30的轴向肩部36叠置在活动钳口40的轴向肩部36上。
[0157]
在本发明的优选实施例中,固定钳口30和活动钳口40的轴向肩部36,46的支承表面360,460各自等距地布置在所述钳口的上端31,41和下端32,42之间。
[0158]
轴向肩部36,46通过它们各自的支承表面360,460彼此紧靠并且具有互补的轮廓,使得固定钳口30和活动钳口40至少部分地彼此交错。
[0159]
如图4所示,轴向肩部36,46包括中心部分,当固定钳口30和活动钳口40在其脱离和引导位置之间移动时,固定钳口30和活动钳口40通过该中心部分连续地放置,并且一个紧靠另一个支撑。
[0160]
如图5和6所示,在每个轴向肩部36,46的中心部分的水平处的内弧面34,44的横截面包括一段圆形,所述圆形段与外弧面33,43的横截面和内壁213的横截面同心。
[0161]
轴向肩部36,46还包括各自的侧向部分,该侧向部分将中心部分延伸至与固定钳口30和活动钳口40的外弧面33,43对齐的圆柱形表面。换句话说,圆柱形表面与固定钳口30和活动钳口40的外弧面33,43内接在同一圆柱体中。
[0162]
因此,横向部分具有圆柱扇形的一般形状。
[0163]
如图5和图6所示,内弧面34,44的横截面在每个轴向肩部36,46的侧向部分的水平处,包括延伸圆形段直至外弧面33,43的直线段。
[0164]
轴向肩部36,46的侧向部分配置为构成当活动钳口40处于脱离位置时用于活动钳口40的角移动的桥台。
[0165]
更具体地调整侧向部分的尺寸,使得当活动钳口40处于脱离位置时,它们通过其支承表面360,460放置并紧靠彼此支撑,固定钳口30的轴向肩部36的侧向部分与活动钳口40的内弧面44接触,并且活动钳口40的轴向肩部46的侧向部分与固定钳口30的内弧面34接触。
[0166]
优选地调整轴向肩部36,46的侧向部分的尺寸以允许活动钳口40在引导位置和脱离位置之间的四十五度角移动。
[0167]
该特征使得固定钳口30和活动钳口40之间的接触区域最大化,并且因此当移动钳口40在脱离位置和引导位置之间发展时,活动钳口40的移动具有很高的精确度。
[0168]
固定钳口30和活动钳口40优选地通过杆60可拆卸地相互连接,杆60从固定钳口纵向延伸穿过称为“同轴壳体”47的壳体,轴向延伸并形成在所述活动钳口40的轴向肩部46中,所述活动钳口40绕杆60自由枢转。换句话说,杆60沿着与活动钳口40的旋转轴重合的纵轴在轴向壳体47中延伸。
[0169]
如图5和6所示,轴向壳体47更具体地穿过活动钳口40的轴向肩部46的中心部分形
成。
[0170]
杆60在两个端部之间延伸,其中一个被称为“上端”,其刚性地连接到固定钳口30,另一个被称为“下端”,在以可自由旋转的方式接合在轴向壳体47中。
[0171]
由于该特征,固定钳口30和活动钳口40可彼此分离。这种布置尤其旨在增强针引导件22的消毒功效。
[0172]
杆60的下端有利地包括阻止平移移动的元件,其适于防止固定钳口30和活动钳口40之间的平移移动。该特征旨在防止固定钳口30和活动钳口40不合时宜的松开。
[0173]
如图6所示,这种阻止平移移动的元件可以形成在所述杆60中径向延伸的销61上。销61意图紧靠活动钳口40布置,从而使所述活动钳口40紧靠固定钳口30固定。
[0174]
更确切地说,如图3所示,活动钳口40有利地包括腔室471,经由该腔室轴向壳体47在其下端42处开口,并且当固定钳口30固定在活动钳口40上时,所述腔室471适于接收销61。
[0175]
图5示出了在轴向壳体47的所有长度上延伸的两个径向相对的轴向凹槽470。这些轴向凹槽470意图在将固定钳口30和活动钳口40彼此固定或解开时接收滑动销61。可选的,取决于销61的长度,活动钳口40的轴向壳体47可仅包括一个轴向凹槽470。
[0176]
轴向凹槽470优选地布置在轴向壳体47中,使得固定钳口30和活动钳口40只有当它们在脱离位置和引导位置之间等距的相对彼此成角度地定位时,也就是说在活动钳口40的两个极端位置间的中间行程,才能固定或者解开它们。
[0177]
活动钳口40有利地包括用于操控其从其外弧面43径向延伸的手柄49。操控手柄49使得所述活动钳口40在被操作者拉动时能够在壳体210中被驱动移动。该操控手柄49意图穿过形成在工具架21中的开口24移动,并且通过下文称为“径向部分”240的部分相对于壳体210径向延伸。
[0178]
因此,开口24形成用于引导操控手柄49的路径,并且延伸超过足够的长度,以使活动钳口40能够在脱离位置和引导位置之间进行角移动。
[0179]
如图2和3所示,径向部分240优选地在其一个端部处通过被称为“轴向部分”241的部分延伸,该部分相对于壳体210轴向延伸,直到其暴露在工具架21的上表面211上。
[0180]
这种特征是有利的,因为它使得针引导件22能够通过使操控手柄49在开口24的径向部分240中枢转,然后在所述手柄沿着壳体210的纵轴在轴向部分241中平移移动,而从工具架21上松开。因此,工具架21和针引导件22可以以最佳方式进行消毒。
[0181]
相反,为了将针引导件22接合在工具架21中,操作者通过沿着壳体210的纵轴的针引导件22的平移移动来引导操控手柄49穿过开口24的轴向部分241直到它到达径向部分240。
[0182]
轴向部分有利地使得如果仅活动钳口40处于引导位置针引导件22才从工具架21上松开。
[0183]
因此,可以在将针引导件22安装在壳体210中之后直接轴向地引导针。
[0184]
这在致动所述活动钳口40朝向其引导位置的期间防止针挤出固定钳口30和活动钳口40之间的引导管23的所有风险。这种拥挤可能导致对针头的不确定的引导,这对患者可能是有害的。
[0185]
为了方便,将针引导件22接合在壳体210中,固定钳口30和活动钳口40可有利地包
括在它们各自的下端32,42和它们各自的外弧面33,34之间延伸的38,48。
[0186]
在图中未示出的针引导装置20的第一实施例的变型中,工具架21和固定钳口形成一体式部件。在本发明的该实施例中,除了其轴向肩部从支承表面延伸到与所述活动钳口的上端齐平的表面,活动钳口与其上述描述相对应。
[0187]
在本发明的该实施例中,固定钳口的轴向肩部从支承表面延伸到与所述固定钳口的下端齐平的表面。
[0188]
在此清楚的是,活动钳口的轴向肩部叠置在固定钳口的轴向肩部上,也就是说工具架21的轴向肩部上。
[0189]
此外,杆刚性地固定到活动钳口并且以可自由旋转的方式接合在固定钳口的轴向壳体中。所述轴向壳体包括两个直径上对置的轴向槽,这些轴向槽从轴向肩部的支承表面延伸到开口在所述工具架21的下表面上的腔室。以本发明优选实施例的类似方式,杆在其下端具有平移移动阻挡元件(例如销),意图当使移动钳口固定到工具架21或从工具架21松开时,该阻挡元件在凹槽中滑动。
[0190]
在本发明的该实施例中,工具架21包括传感器,该传感器适于确定当钳口处于引导位置时,针移动穿过引导管的行程长度。
[0191]
传感器有利地连接到控制单元,该控制单元基于与插入到引导管的针的行程长度有关的信息,以及基于相对于针引导件的位置患者的目标解剖区域的位置,来确定相对于患者的目标解剖区域所述针的位置。
[0192]
传感器可以是本领域技术人员自身已知的光学传感器,其适于通过捕获图像来检测通过引导管引入的针的移动。传感器同样可以由本领域技术人员自身已知的线性测量传感器形成。
[0193]
或者,工具架21可以包括线性光学编码器型传感器,其适于通过读取所述针上的刻度来确定在引导管中移动的有刻度的针的行程。
[0194]
另一替代方案是传感器在通过管道插入时采取由针驱动的轮子的形式,所述轮子与诸如转速计的转动计数器相关联。通过控制单元知道轮子的直径,所述控制单元能够根据在针的移动期间发生的角位移来确定通过引导管插入的针的长度。
[0195]
图7至9表示根据第二实施例的针引导装置20。
[0196]
根据该第二实施例的引导装置20符合根据第一实施例的引导装置20在于,其还包括工具架21和针引导件22,针引导件22包括在引导位置和脱离位置之间,相对于彼此移动的第一钳口30和第二钳口40。
[0197]
此外,在该第二实施例中,第二钳口40,这里称为“驱动钳口”40,还包括操控手柄49。然而,工具架21不包括操控手柄49在其中移动的开口。
[0198]
在该实施例中,第一钳口30被称为“从动钳口”30。
[0199]
与第一实施例相反,在第二实施例中,从动钳口30和驱动钳口40固定到工具架21上,从而可绕分别不同的方向旋转,也就是说不同轴,旋转轴。从动钳口30和驱动钳口40的旋转轴线优选地彼此平行。
[0200]
工具架21包括轭,该轭包括“上突出部”和“下突出部”,从动钳口30和驱动钳口40布置在所述上下突出部之间。在图7中只能看到上突出部。
[0201]
上突出部和下突出部包括一对孔口,两对面对的孔口容纳固定轴,每个固定轴接
合在从动钳口30或驱动钳口40的贯穿壳体中。
[0202]
因此,每个从动钳口30和驱动钳口40围绕与其相关联的轴自由枢转。
[0203]
如图7至9所示,针引导件有利地包括连接到从动钳口30和驱动钳口40的移动传动构件70,同步所述从动钳口30和所述驱动钳口40相对于彼此的角移动。
[0204]
如图8所示,移动传动构件70优选地由分别布置在从动钳口30和驱动钳口40上的两个啮合齿轮部分形成。
[0205]
或者,移动传动构件70可以由凸轮机构(图中未示出)形成,其中从一个钳口,例如驱动钳口40,延伸的凸形部分(male part),与从另一个钳口,例如从动钳口30,延伸的凹形部分(female part)配合。
[0206]
由于该特征,从动钳口30和驱动钳口40以对称的角移动被驱动,也就是说它们通过相同的角移动。
[0207]
因此,针可以被凹槽35,45抓住而不改变其纵轴的位置,这使得例如在换针期间避免任何针定位误差成为可能。
[0208]
此外,该特征使得能够使用不同直径的针。该特征优选地能够引导直径在11g和21g之间的针。
[0209]
如图9所示,弹性构件71紧靠从动钳口30和/或驱动钳口40布置,从而拉动所述从动钳口30和所述驱动钳口40朝向其引导位置旋转。
[0210]
弹性构件71可以更具体地是布置在从动钳口30和驱动钳口40之间的扭转弹簧,与其凹槽35,45相对,并且其每个端部紧靠所述从动钳口30或所述驱动钳口40支撑。或者,弹性构件71可以是压缩弹簧。
[0211]
该特征的优点在于,其使得防止针引导件22在脱离位置移动并因此防止针的意外移动成为可能。
[0212]
此外,该特征使得能够将从动钳口30和驱动钳口40系统地驱动到引导位置,并且因此消除了操作者手动执行该操作的需要。
[0213]
从动钳口30和驱动钳口40在它们的内弧面34,44和它们的外弧面33,43之间的接合处有利地包括齿37,57,当针导向件22处于引导位置时,齿37,57适于相互穿插。
[0214]
如图7至9所示,每个齿37,57因此包括一段凹槽35,45,所述凹槽35,45相对于齿37,57横向延伸。
[0215]
这些特征使得能够沿着所述针分配通过从动钳口30和驱动钳口40,特别是通过齿37,57施加到针上的夹紧力,并且因此参与确保针在其接合在引导管23中时的稳定性。
[0216]
凹槽35,45优选地具有v形横截面。
[0217]
因此,对于工具架21的给定位置,无论其直径如何,针都被夹持在从动钳口30和驱动钳口40之间的引导管23中的完全相同的位置;换句话说,所述针的纵轴的位置不取决于其直径。因此,可以在操作期间换针并且在针的平移中保持相同的移动轴,无论其直径如何。
[0218]
图7和8表示,引导装置20由用于将针引导件22锁定到引导位置的机构80表示。
[0219]
锁定机构80配置成如果钳口后者枢转超过预定角度位置时锁定其中一个钳口,优选地锁定驱动钳口40,以防止旋转。预定角度位置对应于钳口处于引导位置时的位置。
[0220]
因此,通过传动构件将钳口彼此耦合的优点,固定驱动钳口40防止旋转,因此能够
防止从动钳口30的枢转。
[0221]
锁定机构80有利地使得针可以由从动钳口30和驱动钳口40保持,并且更具体地防止针的角度相对移动,同时允许沿着其纵轴平移移动。
[0222]
因此,针的任何意外的横向驱动都不能导致针的移动,这会易使针从引导管脱离并最终损伤患者。
[0223]
锁定机构80包括将操控手柄49连接到驱动钳口40的枢转连接。因此,操控手柄49相对于所述驱动钳口40在下文称为“阻挡位置”和“解锁位置”的两个极端角度位置之间自由枢转。
[0224]
操控手柄49有利地包括肩部,该肩部配置成与驱动钳口40的肩部配合,从而当操控手柄朝向其解锁位置枢转时防止操控手柄相对于驱动钳口40旋转,如在图8和9剖视图中可见。这些肩部形成第一角度桥台。
[0225]
可以同样地使操控手柄49和驱动钳口40一致,从而相互配合,从而防止操控手柄49朝向其阻挡位置枢转时相对于驱动钳口40旋转,从而形成第二个角度桥台,如图7所示。
[0226]
在图7至9所示的锁定机构示例中,唇部81从操控手柄49朝向工具架21延伸。
[0227]
当操控手柄49占据阻挡位置时,意图使唇部81紧靠在工具架21的表面依靠支撑。为此,工具架21包括接触表面215,该表面意图当支撑在其上时接收所述唇部81。
[0228]
接触表面215优选地具有基本上凹形的横截面,并且例如从工具架21中的腔延伸直到突起,如图7至9所示。
[0229]
工具架21配置成使得当从动钳口30和驱动钳口40处于脱离位置时,唇部81接合在腔中。因此,该腔与唇部81的角行程一致。
[0230]
如图7至图9所示,操控手柄49可包括开口490,当从动钳口30和驱动钳口40朝向它们的脱离位置移动时,工具架的突起通过该开口490引入。
[0231]
锁定机构80有利地包括弹性构件82,该弹性构建推进所述手柄朝向其阻挡位置旋转,使得当从动钳口30和驱动钳口40处于引导位置时,唇部81紧靠在工具架21的接触表面215支撑。
[0232]
弹性构件82优选地由布置在驱动钳口40和操控手柄之间的扭转弹簧形成。
[0233]
无论接合在引导管中的直针径如何,该锁定机构80都是有利的有效。
[0234]
此外,该特征使得能够通过简单的机械方法将针引导件固定在引导位置。
[0235]
另一个优点在于针引导件的快速解锁以允许其移动到脱离位置。
[0236]
事实上,为了减少和/或克服作为支撑现象的来源的摩擦,仅需要向操纵柄施加与弹性构件的驱动相反的力。
[0237]
上述特征可以有利地适合根据本发明的引导装置20的两个实施例。
[0238]
引导装置20可有利地包括光学导航系统(图中未示出),其意图连接到机器臂10的控制单元,基于由所述光学导航系统发送的信息确定第一钳口30和第二钳口40相对于彼此的位置。
[0239]
控制单元被配置成根据第一钳口30和第二钳口40相对于彼此的位置来控制机器臂10的移动并因此控制针引导件22的移动。
[0240]
光学导航系统包括参考光学元件,例如其表面反光的球体。
[0241]
球体由从第一钳口30和第二钳口40中的每一个的上端31,41延伸的分支携带。
[0242]
光学导航系统还包括读取模块,其向控制单元发送与每个参考光学元件的空间的位置有关的信息。
[0243]
第一钳口30更具体地包括单独的参考光学元件,第二钳口40更具体地包括至少一对参考光学元件。该对参考光学元件由从共有分支延伸的一对分支携带,通过该分支将它们固定到活动钳口40。
[0244]
基于由读取模块接收的信息,控制单元能够确定该对参考光学元件相对于个体参考光学元件的位置,并从中推断出第一钳口30和第二钳口40相对于彼此的位置。
[0245]
控制单元被配置成使得如果其确定第一钳口30和第二钳口40处于引导位置,则其防止机器臂10的移动。因此不可能改变引导管的位置,因此,不可能移动插入到所述引导管中的针的平移移动的轴或者从导向件侧向地释放针。
[0246]
该特征使得能够在医疗操作期间保持引导装置20的位置并因此保持引导管23的位置,从而保证针插入患者的目标解剖区域的准确性。
[0247]
此外,该特征使得避免易于由插入针引导件22中的针的移动引起的事故。
[0248]
控制单元还被配置成使得如果其确定第一钳口30和第二钳口40处于脱离位置,则其允许机器臂10的移动。然后可以使所述机器臂10在患者的目标解剖区域侧向地移动,从而在不与引导装置20接触的情况下使针从针引导件22脱离。因此,针在其脱离期间保持不动。
[0249]
该特征使得可以防止易于由插入目标解剖区域中的针的移动引起的事故。
[0250]
更一般地的,应注意,已经通过非限制性示例描述了上文考虑的本发明的实施例和应用,因此可以设想其他变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。